
Fターム[2B043EC13]の内容
農業機械一般(操向) (6,001) | 検出量の伝達又は処理 (391) | 検出量の処理と制御 (323) | 演算 (41)
Fターム[2B043EC13]に分類される特許
1 - 20 / 41
作業車両
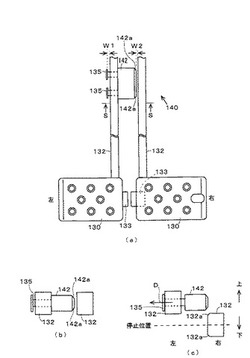
【課題】作業者に負担を掛けないで、ブレーキペダルの連結と非連結を容易に切り替え可能であり、作業条件に合わせた操作が行える作業車両の提供である。
【解決手段】エンジンと前輪と後輪と苗植付部と左右のサイドクラッチと左右のサイドブレーキと左右のサイドクラッチ及び左右のサイドブレーキを操作可能な左右のブレーキペダル130と副変速レバーと副変速レバーセンサとを設けた走行車両に、左右のブレーキペダル130を連結又は非連結に切り替える切替装置140と、副変速レバーが高速時に切替装置140を作動して左右のブレーキペダル130を連結させる制御装置とを設ける。高速の直進走行時には、左右のブレーキペダル130が連結するため、停止操作が容易に行える。一方、低速時には、左右のブレーキペダル130が連結しないため、作業条件に合わせた操作が行える。
(もっと読む)
田植機

【課題】 本発明の課題は、機体旋回後の農作業装置の取扱いを可能な範囲で旋回動作と連動して自動処理することにより、オペレータの負荷を最小限度に抑えることができる自動植付作業車用制御装置を提供する点にある。
【解決手段】 旋回開始時のハンドル操作に基づいて後輪のドライブシャフト回転のカウントを開始し、植付部が下降状態で、その後の操舵ハンドルのハンドル角度が規定値以上でなく直進状態に戻した操作状態であることを条件に、更にその後、前記カウントが植付部を下降させたときの第一の所定値よりも大きい第二の所定値になったとき、植付クラッチを入にする連動制御を備え、植付部が下降状態で、その後の操舵ハンドルのハンドル角度が規定値以上であれば、連動制御を終了する制御装置を設けた田植機とした。
(もっと読む)
田植機
【課題】圃場の環境に左右されることなく、進行方向と苗の並び方向とを確実に整合させることができる田植機を提供する。
【解決手段】左フロントカメラ及び右フロントカメラ21にて圃場に植え付けられた苗を撮像し、撮像された苗を表示部8に表示する。操作者は、表示部8に表示された苗の並び方向を確認して田植機を操舵し、表示部8に表示された線を最も端に位置する苗の列に一致させて、進行方向と苗の並び方向とを整合させることができる構成とした。
(もっと読む)
田植機
【課題】操作者が植付部に苗を補給している間であっても、苗を整列させて植付けることができる田植機を提供する。
【解決手段】CPUは、自動走行スイッチがオンになっている場合に、左右方向において、表示部に表示された線の中央と苗の列との距離を求め、求めた距離に応じた操舵量を演算する。操舵量を演算したCPUは、電磁切換弁201に切換信号を出力する。走行部1は、演算された操舵量だけ右又は左に操舵される。操舵終了後は、電磁切換弁201を中立位置に戻し、走行部を直進させる。
(もっと読む)
コンバイン
【課題】オペレータが要望するフィーリング(操作感覚)に細かく対応することができて、オペレータの旋回操作上の要求を十分に満足させ得るようにすること。
【解決手段】駆動源の動力によって走行する走行機体と、該走行機体を旋回操作するための操向手段と、該操向手段に設けられ前記走行機体の旋回量を微調節するための旋回量微調節手段と、を有するコンバインであって、前記旋回量微調節手段による前記走行機体の旋回量の調節量は、前記旋回量微調節手段の操作量に対応させて変更可能に構成した。旋回量微調節手段による走行機体の旋回量の調節量は、旋回量微調節手段の操作量に対応させて変更可能に構成しているため、オペレータは、旋回量微調節手段の操作量を変更することで、簡単に旋回量微調節手段による走行機体の旋回量の調節量を変更することができる。
(もっと読む)
防除作業機
【課題】圃場に散布される薬剤のばらつきを抑制すること。
【解決手段】圃場に薬剤を散布する防除作業機は、GPS衛星から送信される電波を受信するGPS受信部10と、GPS受信部10から得られる防除作業機の進行方向における位置情報と、前記薬剤の散布幅とに基づいて、防除作業機が旋回した後に圃場の薬剤を散布する領域へ進入する進入位置を求める制御用プロセッサ40を含む制御装置9と、進入位置を表示する表示部11Dと、を含む。
(もっと読む)
施肥装置
【課題】圃場の形状・寸法にかかわらず、効率性の高い走行経路の設定ができるとともに、走行経路の設定を行いながら連続的に施肥できるようにする。
【解決手段】第1設定点P1と第2設定点P2とを結ぶ基準線L0を設定する制御と、基準線L0と対向する平行な第2枕地走行経路L12を設定する制御と、第2枕地走行経路L12上に第3設定点P3を設定する制御と、第3設定点P3を設定することにより第2枕地走行経路L12の位置を設定する制御と、設定された第2枕地走行経路L12の位置に基づいて、第1枕地走行経路L11と第2枕地走行経路L12の間の距離を算出するとともに、第1枕地走行経路L11と第2枕地走行経路L12の間の施肥範囲B1中で施肥されてない範囲を算出し、枕地走行経路L1と内側走行経路L2を備えた走行経路Lを設定する。
(もっと読む)
農作業車の旋回開始位置設定装置及び旋回開始位置設定方法
【課題】農作業車が枕地において確実に旋回できる旋回開始位置を自動的、且つ確実に設定する。
【解決手段】GPSによる位置情報に基づいて、農作業車100の走行起点とする原点Pを設定する原点設定部1と、原点Pから直線状の基準線L1を設定する規準線設定部3と、原点Pからの移動距離を計測する移動距離計測部4と、農作業車100の実際の走行距離を計測する走行距離計測部5と、計測された移動距離と走行距離との差を算出する距離差算出部6と、農作業車100が旋回していると判定する旋回判定部7と、農作業車100の旋回が判定された位置に旋回判定点P2を設定する旋回判定点設定部8と、規準線L1上の任意の位置に直線基準点P3を設定する直線基準点設定部9と、旋回判定点P2から規準線L1に戻って、規準線L1上の距離差がない最終地点を検出し、この最終地点を旋回開始位置P4として設定する旋回開始位置設定部10とを備えた。
(もっと読む)
自動芝刈り機
【課題】走行路面に柔軟に対応して傾斜地形のカッティングも可能な自動芝刈り機を提供する。
【解決手段】本発明は、少なくとも位置検出手段を含む各種センサとモータ制御の駆動輪とを有し、学習機能を担う制御ユニットを備えた自律走行型の自動芝刈り機であって、制御ユニットは、センサの情報を基に駆動輪を制御して目標地点に移動させるためのドラム制御部と、走行路面の傾斜に応じて車軸を動かし車体の平衡を保つ車体平衡部と、走行路面に沿ってカッティングユニットを追従させて芝刈りを行うカッティング部と、センサの情報を基に各ユニットを制御するための各種演算及び該演算に対応する処理を行う演算処理部と、を有する。
(もっと読む)
作業車の車体状態切り換え構造
【課題】車体の状態を第1状態から第2状態に切り換える際の判断基準に創意工夫を凝らすことにより、作業走行時において車体の状態が不測に第1状態から第2状態に切り換わる誤作動の発生を抑制し、その誤作動に起因した不都合の発生を抑制する。
【解決手段】操舵輪の直進位置からの切れ角を検出する切角センサ55と、この切角センサ55の検出に基づいて車体の状態を切り換える車体状態切換手段48とを備えた作業車の車体状態切り換え構造において、車体の走行速度を検出する車速センサ56を備え、車体状態切換手段48が、切角センサ55の検出、および、車速センサ56の検出に基づいて、車体の旋回角度を算出し、かつ、算出した旋回角度が設定角度を超えると、車体の状態を車体に連結した作業装置を機能させる作業用の第1状態から作業装置を機能させない移動用の第2状態に切り換えるように構成した。
(もっと読む)
自律走行作業車の制御装置
【課題】走行予定領域における作業車の位置を簡易な校正で検出するようにした自律走行作業車の制御装置を提供する。
【解決手段】角速度センサの出力に基づいて算出される進行方位に基づいて原動機を駆動して方位(地磁気)センサの出力に従って走行予定領域の境界を所定の起点から周回走行し、周回走行の間、算出される進行方位と走行距離を複数のビットに分割されてなるビットマップ上に順次記録して走行予定領域の境界線についての走行軌跡を生成し(S10からS14)、生成された走行軌跡を地図情報に変換し(S18)、地図情報のビットから作業車の位置を特定(検出)し、方位センサの出力から得られる規定方位を基準とし、算出される進行方位と走行距離と検出される位置とに基づき、作業車を直進走行させつつ、作業させる(S20)。
(もっと読む)
乗用型芝刈り車両及びその制御方法
【課題】ペダルやステアリングの操作状況に応じて生ずる芝の損傷を防止するとともに車両にかかる負担を軽減することができる乗用型芝刈り車両及びその制御方法を提供する。
【解決手段】乗用型芝刈り車両1は、ペダル(後進アクセルペダル17及び前進アクセルペダル18)の操作量に応じて回転駆動され、ステアリングホイール16の操作量に応じて回転軸の角度が変更される車輪(前輪11a,11b及び後輪12)を備える車両であって、ペダルの操作量に基づいて目標とすべき車両の速度を算出する目標速度算出部38aと、車輪の回転軸の角度から車両の速度の制限値である車両速度制限値を設定する速度制限値設定部38bと、目標速度算出部38aの算出結果が車両速度制限値を超えている場合には、目標とすべき車両の速度を車両速度制限値に制限して車輪の回転駆動を制御するモータ制御部38cとを備える。
(もっと読む)
乗用型芝刈り車両及びその制御方法
【課題】ペダルやステアリングの操作状況に応じて生ずる芝の損傷を防止するとともに車両にかかる負担を軽減することができる乗用型芝刈り車両及びその制御方法を提供する。
【解決手段】乗用型芝刈り車両1は、ステアリングホイール16の操作量に応じて回転軸の角度が変更される後輪12を備える車両であって、車両の速度を検出する速度センサ36と、ステアリングホイール16の操作量に基づいて目標とすべき後輪12の回転軸の角度である目標操舵輪角度を算出する目標操舵輪角度算出部38aと、速度センサ36の検出結果に応じて後輪12の回転軸の角度の制限値である操舵輪角度制限値を設定する操舵輪角度制限値設定部38bと、目標操舵輪角度が操舵輪角度制限値を超えている場合には、目標操舵輪角度を操舵輪角度制限値に設定して後輪12を制御するモータ制御部38cとを備える。
(もっと読む)
薬剤散布用管理作業車両
【課題】GPSセンサによって得られる機体の移動速度を散布車速として車速連動により所要の面積密度で薬剤を散布する際に、散布走行速度の検出精度について妥当性の判断を可能とする薬剤散布用管理作業車両を提供する。
【解決手段】薬剤散布用管理作業車両は、圃場走行可能に機体を支持する前輪3及び後輪4と、GPS電波を受けて機体位置を検出するGPSセンサS2と、このGPSセンサS2によって得られた機体の移動速度であるGPS車速VGを散布車速として車速連動により散布動作する散布装置Dとを備えて単位面積当たり所定の薬液量で薬剤散布走行が可能に構成され、上記前輪3及び後輪4の走行動作を検出する車速センサS1を設け、この車速センサS1に基づいて前輪3及び後輪4の走行動作と対応する機体の計算車速Vsを算出し、この計算車速Vsと上記GPS車速VGとを区別して表示するモードを設けたものである。
(もっと読む)
薬剤散布用管理作業車両
【課題】単位面積当たり所定量の薬液散布による適正な薬剤散布のために、高精度の散布速度を安定して取得することができる薬剤散布用管理作業車両を提供する。
【解決手段】薬剤散布用管理作業車両は、圃場走行可能に機体を支持する前輪3及び後輪4と、散布車速を連動基準として散布量制御する制御部Cにより単位面積当たり所定量の薬液量で薬剤散布を行う車速連動散布装置Dとを備えて構成され、上記前輪3及び後輪4の駆動動作を検出する駆動センサS1とGPS電波を受けて機体位置を検出するGPSセンサS2とを設け、このGPSセンサS2によって得られた機体の移動速度を散布車速として車速連動散布装置Dを散布量制御するとともに、駆動センサS1によって得られる機体の駆動速度について上記移動速度との差から算出される前輪3及び後輪4のスリップ率を取出し可能に保持する格納部C1を備えたものである。
(もっと読む)
農作業機
【課題】 機体の旋回制御において、圃場状況や作業形態に応じて更なる作業性向上を図ると共に、作業開始位置あるいは作業終了位置の更なる適正化を図ることを課題とする。
【解決手段】 機体の畦際旋回時に農作業装置の作動を停止してからの走行距離が所定の設定走行距離に到達するか又は機体の畦際旋回時に農作業装置の作動を停止してからの時間が所定の設定時間に到達すると自動的に農作業装置の作動を開始させる制御装置を設けた農作業機において、農作業装置の作動停止時又は作動開始時の機体の向きに対する畦の角度を判別する畦角度判別装置と、機体の旋回方向を判別する旋回方向判別装置102を設け、制御装置は、畦角度判別装置と旋回方向判別装置102とに基づき、機体の旋回方向が畦から離れる側であるときに前記所定の設定走行距離を小さく補正し、機体の旋回方向が畦に近づく側であるときに前記所定の設定走行距離を大きく補正する構成とした。
(もっと読む)
乗用田植機
【課題】所望の箇所で正確に苗植付装置を下降可能な乗用田植機を提供する。
【解決手段】制御部50が、旋回時前期にて、植付クラッチ51、サイドクラッチ55をこの順に切り、旋回時後期にて、サイドクラッチ55、植付クラッチ51をこの順に入れる。そして、エンジン12から後輪17へ駆動力の伝達するための出力軸EOをサイドクラッチ55の上流側に備え、後輪17の回転数を検出する回転センサ54を出力軸EOに設け、旋回時後期にて、植付クラッチ51を入れるタイミングを、旋回時における植付クラッチ51を切ってからサイドクラッチ55を切るまでの間の回転センサ54の回転数と既定の回転数との和に基づいて制御部50が決定する。
(もっと読む)
移動作業機の操縦制御装置
【課題】乗用型移動作業機の自動操縦を実現し、作業者の負担を軽減することを目的とする。
【解決手段】移動作業機に設置した1つの可動式方向測定装置と、2つの可動式距離測定装置により作業領域の周囲に設置した複数の案内支柱を検出して移動作業機の進路の基準とし、移動作業機の進行に伴って目標とする案内支柱を切り換えながら途切れることなく検出し、移動作業機に内蔵する演算制御装置が正しい進路を進行するよう移動作業機を制御することで、移動作業機の案内支柱の列に沿った前進、転回を自動操縦で行うことを可能とし、前記課題を克服する。
(もっと読む)
乗用型苗移植機
【課題】 操向用の左右前輪と左右後輪を設けた走行車両に苗移植作業装置を昇降自在に装着し、左右線引きマーカと該左右線引きマーカの作動を停止させるマーカ作動切替え操作具とを設けた乗用型苗移植機において、旋回時に、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入り切り操作や作業装置の上昇・下降操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性の点において課題があった。
【解決手段】 走行距離算出手段にて苗移植作業装置を上昇させる指令を出力してからの走行距離を算出して、該走行距離に応じて苗移植作業装置が下降する指令を出力する自動旋回制御を行なうと共に、旋回時の左右後輪の回転数を比較し、該回転数の多い左右一方側の線引きマーカを旋回後に線引き作用状態に切り替える制御装置を設けたことを特徴とする乗用型苗移植機とした。
(もっと読む)
乗用型田植機
【課題】作業車において旋回の終了を適切に検出することができるように構成する。
【解決手段】機体の走行距離を検出する走行距離検出手段と、操向操作自在な前輪の直進位置からの操向角度を検出する操向角度検出手段とを備え、車輪2の回転数に基づいて機体の走行距離Gと、操向操作自在な車輪1の直進位置A1からの操向角度Aとにより、作業行程からの旋回開始に基づいて、旋回開始前の機体の進行方向での旋回中の機体の位置Y2を検出する。
(もっと読む)
1 - 20 / 41
[ Back to top ]