
Fターム[2B043EC16]の内容
農業機械一般(操向) (6,001) | 検出量の伝達又は処理 (391) | 検出量の処理と制御 (323) | 修正、補正又は複合 (25)
Fターム[2B043EC16]に分類される特許
1 - 20 / 25
作業車両
【課題】
操舵部材を直進位置に保持して自動直進走行を行なうことができると共に、機体が傾斜すると自動的に進行方向を修正することのできる作業車両を提供する。
【解決手段】
走行車体2に操舵輪10を設け、操舵輪10を操作する操舵部材34を設け、走行車体2に機体の傾斜を検出する傾斜検知部材101を設け、傾斜検知部材101が左右方向の傾斜を検知すると操舵部材34を操作して走行車体2の進行方向を補正する作業車両において、操舵部材34を操作自在な自由状態と、操舵部材34を直進位置に保持する保持状態に切り替える操作切替部材103を設け、操作切替部材103を保持状態に操作していても傾斜検知部材101が機体の傾斜を検知すると、操舵部材34の保持を解除して傾斜方向の反対側に操作する構成とする。
(もっと読む)
作業機

【課題】機体の旋回走行が終了して次回の作業行程にて作業走行するときに、作動部を時間遅れなく作動状態にすることが可能となる作業機を提供する。
【解決手段】電動モータM3の操作によって作動状態と非作動状態とに切り換え操作自在な作動部が、作動状態側に切り換えてから起動用所要時間が経過したのちに作動状態に切り換わるように構成され、旋回行程中における機体の位置を検出する機体位置検出手段51と機体の走行速度を検出する車速検出手段50との検出情報に基づいて、機体が旋回走行を開始したのちに旋回終了位置に至ると予測される時点よりも起動用所要時間に相当する時間だけ前の時点における機体位置に至ると予測されるタイミングを求めて、そのタイミングにて電動モータM3を作動状態側に切り換える作動部操作手段53と、前記タイミングを補正する人為操作式のタイミング補正手段100とが備えられている。
(もっと読む)
コンバイン
【課題】オペレータが要望するフィーリング(操作感覚)に細かく対応することができて、オペレータの旋回操作上の要求を十分に満足させ得るようにすること。
【解決手段】駆動源の動力によって走行する走行機体と、該走行機体を旋回操作するための操向手段と、該操向手段に設けられ前記走行機体の旋回量を微調節するための旋回量微調節手段と、を有するコンバインであって、前記旋回量微調節手段による前記走行機体の旋回量の調節量は、前記走行機体の速度に対応させて変更可能に構成した。したがって、操向手段による旋回操作性を良好に確保した上で、更に旋回量微調節手段による補足的な操作を付加することができる。この際、旋回量微調節手段による走行機体の旋回量の調節量を走行機体の速度に対応させて変更可能に構成しているため、かかる調節量を走行機体の速度に対応させて変更することで、種々の状況に即応させて走行機体の曲がり具合を変更することができる。
(もっと読む)
コンバイン
【課題】オペレータが要望するフィーリング(操作感覚)に細かく対応することができて、オペレータの旋回操作上の要求を十分に満足させ得るようにすること。
【解決手段】駆動源の動力によって走行する走行機体と、該走行機体を旋回操作するための操向手段と、該操向手段に設けられ前記走行機体の旋回量を微調節するための旋回量微調節手段と、を有するコンバインであって、前記旋回量微調節手段による前記走行機体の旋回量の調節量は、前記操向手段の操作量に対応させて変更可能に構成した。したがって、操向手段による旋回操作性を良好に確保した上で、更に旋回量微調節手段による補足的な操作を付加することができる。この際、調節量を操向手段の操作量に対応させて変更することで、操向手段による大雑把な旋回操作と旋回量微調節手段による補足的かつ微細な旋回操作を一体密接的に関連づけることができる。
(もっと読む)
自動芝刈り機
【課題】走行路面に柔軟に対応して傾斜地形のカッティングも可能な自動芝刈り機を提供する。
【解決手段】本発明は、少なくとも位置検出手段を含む各種センサとモータ制御の駆動輪とを有し、学習機能を担う制御ユニットを備えた自律走行型の自動芝刈り機であって、制御ユニットは、センサの情報を基に駆動輪を制御して目標地点に移動させるためのドラム制御部と、走行路面の傾斜に応じて車軸を動かし車体の平衡を保つ車体平衡部と、走行路面に沿ってカッティングユニットを追従させて芝刈りを行うカッティング部と、センサの情報を基に各ユニットを制御するための各種演算及び該演算に対応する処理を行う演算処理部と、を有する。
(もっと読む)
自律走行作業車の制御装置
【課題】走行予定領域における作業車の位置を簡易な校正で検出するようにした自律走行作業車の制御装置を提供する。
【解決手段】角速度センサの出力に基づいて算出される進行方位に基づいて原動機を駆動して方位(地磁気)センサの出力に従って走行予定領域の境界を所定の起点から周回走行し、周回走行の間、算出される進行方位と走行距離を複数のビットに分割されてなるビットマップ上に順次記録して走行予定領域の境界線についての走行軌跡を生成し(S10からS14)、生成された走行軌跡を地図情報に変換し(S18)、地図情報のビットから作業車の位置を特定(検出)し、方位センサの出力から得られる規定方位を基準とし、算出される進行方位と走行距離と検出される位置とに基づき、作業車を直進走行させつつ、作業させる(S20)。
(もっと読む)
乗用型芝刈り車両及びその制御方法
【課題】ペダルやステアリングの操作状況に応じて生ずる芝の損傷を防止するとともに車両にかかる負担を軽減することができる乗用型芝刈り車両及びその制御方法を提供する。
【解決手段】乗用型芝刈り車両1は、ペダル(後進アクセルペダル17及び前進アクセルペダル18)の操作量に応じて回転駆動され、ステアリングホイール16の操作量に応じて回転軸の角度が変更される車輪(前輪11a,11b及び後輪12)を備える車両であって、ペダルの操作量に基づいて目標とすべき車両の速度を算出する目標速度算出部38aと、車輪の回転軸の角度から車両の速度の制限値である車両速度制限値を設定する速度制限値設定部38bと、目標速度算出部38aの算出結果が車両速度制限値を超えている場合には、目標とすべき車両の速度を車両速度制限値に制限して車輪の回転駆動を制御するモータ制御部38cとを備える。
(もっと読む)
乗用型芝刈り車両及びその制御方法
【課題】ペダルやステアリングの操作状況に応じて生ずる芝の損傷を防止するとともに車両にかかる負担を軽減することができる乗用型芝刈り車両及びその制御方法を提供する。
【解決手段】乗用型芝刈り車両1は、ステアリングホイール16の操作量に応じて回転軸の角度が変更される後輪12を備える車両であって、車両の速度を検出する速度センサ36と、ステアリングホイール16の操作量に基づいて目標とすべき後輪12の回転軸の角度である目標操舵輪角度を算出する目標操舵輪角度算出部38aと、速度センサ36の検出結果に応じて後輪12の回転軸の角度の制限値である操舵輪角度制限値を設定する操舵輪角度制限値設定部38bと、目標操舵輪角度が操舵輪角度制限値を超えている場合には、目標操舵輪角度を操舵輪角度制限値に設定して後輪12を制御するモータ制御部38cとを備える。
(もっと読む)
農作業機
【課題】 機体の旋回制御において、圃場状況や作業形態に応じて更なる作業性向上を図ると共に、作業開始位置あるいは作業終了位置の更なる適正化を図ることを課題とする。
【解決手段】 機体の畦際旋回時に農作業装置の作動を停止してからの走行距離が所定の設定走行距離に到達するか又は機体の畦際旋回時に農作業装置の作動を停止してからの時間が所定の設定時間に到達すると自動的に農作業装置の作動を開始させる制御装置を設けた農作業機において、農作業装置の作動停止時又は作動開始時の機体の向きに対する畦の角度を判別する畦角度判別装置と、機体の旋回方向を判別する旋回方向判別装置102を設け、制御装置は、畦角度判別装置と旋回方向判別装置102とに基づき、機体の旋回方向が畦から離れる側であるときに前記所定の設定走行距離を小さく補正し、機体の旋回方向が畦に近づく側であるときに前記所定の設定走行距離を大きく補正する構成とした。
(もっと読む)
乗用型対地作業車両
【課題】乗用型対地作業車両において、車両が傾斜面上を走行する場合でも、運転者が意図する方向への走行を可能とし、さらに、ヨーレートの検出値と目標値との偏差に基づく制御作用時の車両の挙動特性を自由に設定しやすくすることである。
【解決手段】乗用型対地作業車両である芝刈車両10は、コントローラ48と、車両のヨーレートを検出するヨーレートセンサ60とを備える。コントローラ48は、運転者により入力される加速指示及び旋回指示に基づいて左右車輪用電動モータ22,24それぞれの2の目標回転速度指令値を算出し、目標ヨーレートとヨーレート検出値との偏差に基づいて、車輪用電動モータ22,24にそれぞれ関係する2の補正係数を取得し、2の目標回転速度指令値のそれぞれを2の補正係数により補正して、車輪用電動モータ22,24の駆動を制御する。
(もっと読む)
作業車の操向制御装置
【課題】トランスミッションの応答性能に拠らず、さらに、機体位置検出手段が検出不能域に存在する場合であっても、機体を、所定の進行方向から外れることなく圃場の作物に沿って自動操向させることのできる作業車の操向制御装置を提供すること。
【解決手段】機体位置検出手段16の検出値に基づいて、修正出力を出して機体が圃場の作物Mに沿うように操向操作手段22a,22bを制御する操向制御手段23aと、操向制御手段23aが修正出力の出力を開始すると、右及び左の回転数検出手段26a,26bの検出値の差を演算する演算手段23bとを備え、演算手段23bの演算値が設定値以上になると、操向制御手段23aが修正出力の出力を停止するように構成する。
(もっと読む)
田植機
【課題】 本発明の課題は、機体旋回後の農作業装置の取扱いを可能な範囲で旋回動作と連動して自動処理することにより、オペレータの負荷を最小限度に抑えることができる自動植付作業車用制御装置を提供する点にある。
【解決手段】 操舵ハンドルとオペレータシートを備え、転向車輪と後輪の4輪で駆動する構成とし、機体後部に昇降部を介して昇降可能に植付部を設けた田植機において、旋回時のハンドル操作に基づいて後輪のドライブシャフト回転のカウントを開始し、該カウントが第一の所定値(n2’)になったときにハンドル角度が規定値(b)以上でなく、その後、カウントが第二の所定値(n2)になったとき、植付クラッチを入にする連動制御を備え、カウントが第一の所定値(n2’)になったときにハンドル角度が規定値(b)以上であれば、連動制御を終了する制御装置を設けた。
(もっと読む)
刈取収穫機
【課題】 機体を自動操向操作により走行させながら植立茎稈の刈取作業を行うことが可能でありながら、植立茎稈の刈残し等が発生しない良好な状態で且つ能率よく刈取作業を行うことが可能となる刈取収穫機を提供する。
【解決手段】 対地位置検出手段にて求められる機体の対地位置情報に基づいて機体が作業対象領域内の設定経路に沿って走行するように、機体の向きを変更操作自在な操向操作手段29を制御する制御手段Hが備えられ、その制御手段Hが、設定経路における植立茎稈を刈り取る刈取用経路部分を走行するときに、対茎稈位置検出手段83にて検出される植立茎稈に対する機体の横幅方向の位置が刈取用の適正位置から外れると、対地位置検出手段の検出情報にかかわらず、対茎稈位置検出手段83の検出情報に基づいて機体の横幅方向の位置が適正位置になるように操向操作手段29を制御する。
(もっと読む)
動的限定的ステアリングフィードバック
【課題】 運転制御が容易な芝維持車、そのための動的限定的ステアリングフィードバックシステム、および芝維持車の制御方法を提供する。
【解決手段】 芝維持車用の動的限定的フィードバックシステムが、芝維持車のステアリング角および/または対地速度を検出する入力装置を含む。入力装置は、芝維持車のステアリング角および/または対地速度に相互関連する入力信号を送信する。本システムはまた、芝維持車のステアリング抵抗、旋回比、速度制限、対地速度および/または旋回角制限に影響を及ぼす出力装置を含む。本システムはさらに、入力信号を受信し、かつ入力信号に基づいて出力装置に制御信号を出力するコントローラを含み、入力信号に基づいて、芝維持車のステアリング抵抗、旋回比、速度制限、対地速度および/または旋回角制限を変化させる。芝維持車の制御方法も開示される。
(もっと読む)
乗用型収穫作業機
【課題】圃場の状態に応じたきめ細かい旋回態様を選択可能な収穫作業機を提供する。
【手段】収穫作業機は走行機体の左右に配置したクローラによって走行する。左右のクローラは、直進機構と旋回機構との組み合わせによって周速度が相対的に変化し、これによって左右いずれかに旋回する。また、旋回時におけるクローラの動きは、旋回内側のクローラが逆転しないノーマルモードと、旋回内側のクローラが逆転するスピンターンモードとがある。更に、直進機構及び旋回機構はオペレータの操作によって出力を増減できる増減装置141,142を備えており、ノーマルモードにおいてもスピンターンにおいても速度を選択できる。このため、圃場の状況に応じた旋回速度を選択できる。
(もっと読む)
作業車
【課題】隣接耕合せの作業性を向上することができ、耕耘作業の作業性を向上することができる作業車を実現する。
【解決手段】走行車体1の向きを検出する向きセンサ39,40と、走行車体1に右又は左の旋回指令を入力する旋回指令入力部37と、旋回指令入力部37によって旋回指令が入力されると、向きセンサ39,40の検出結果に基づいて、旋回指令入力部37により入力された右又は左に前輪3を操向操作し予め設定された旋回目標角度に走行車体1を自動旋回させる自動旋回制御手段と、旋回目標角度を変更調節可能な旋回目標角度調節具42とを備えて、作業車を構成する。
(もっと読む)
コンバインの操向操作装置
【課題】刈取り作業時の微妙な機体の進行方向調整を行い易くするために、操向ハンドルや操向レバーに設ける旋回方向微調整装置を簡単に操作できて機体の旋回角度調整が容易に出来るようにする。
【解決手段】操向ハンドルや操向レバー16等の操向操作具5に該操向操作具5を握ったままの指先で操作可能な旋回微調整押しボタン48,49,52,53を設け、この旋回微調整押しボタン48,49,52,53のどれかのオン信号に基づいて旋回内側のサイドクラッチを遮断すると共に、左右のサイドクラッチギヤ74L,74R間に連動させた差動機構のデフケース100を低速駆動する旋回クラッチ98を、所定の短時間だけ接続するように構成した。
(もっと読む)
作業車用制御装置
【課題】大廻り旋回についての確実な事前判定により、自動旋回制御に反映して大廻り旋回の影響を小さく抑えることができる作業車用制御装置を提供する。
【解決手段】作業車用制御装置は、旋回走行中の走行車輪の転動量に基づいて旋回行程の所定の基準位置nによる作業機動作制御を行う制御処理部21を備えて構成され、上記制御処理部21は、走行車輪の左右回転速度差が所定の基準値より小なる場合に、上記基準位置nを所定の補正処理した補正基準位置により作業機動作制御を行うように構成したものである。
(もっと読む)
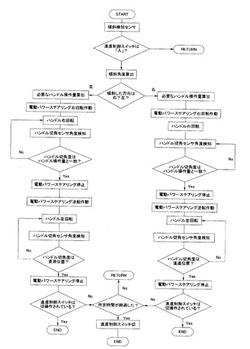
作業車両
【課題】操向ハンドル10の回動操作に応じて走行機体を左又は右に旋回させる構成の作業車両において、走行機体の進行方向を修正する際に、操向ハンドル10を細かく切り足したり切り戻したりする手間をなくす。
【解決手段】操向ハンドル10のハンドルホイル部94に、走行機体の進行方向を微調節操作するためのステアリングスイッチ100を備える。ステアリングスイッチ100における左右方向の操作は、操向ハンドル10の回動操作に拘らず、常に許容される構成にする。すなわち、ステアリングスイッチ100と操向ハンドル10とは互いに独立的に操作し得るように構成する。そして、操向ハンドル10の単位操作量に対する走行機体1の旋回動作量は、ステアリングスイッチ100の単位操作量に対する走行機体1の旋回動作量と比べて格段に大きく設定する。
(もっと読む)
位置情報取得システム
【課題】GPSを利用した位置情報取得システムでありながら、誤差の少ない正確な位置情報の取得を実現できるようにする。
【解決手段】圃場の進入口に配置され且つ識別情報IDを有するRFIDタグ41と、RFIDタグ41の識別情報を読み取るタグリーダ42と、人工衛星STからの電波にて自己の測定位置情報を検出する移動局ユニット43と、RFIDタグ41の基準位置情報を識別情報に対応させて予め記憶した外部サーバ44と、トラクタ1に搭載したコントローラ40とを備える。タグリーダ42と移動局ユニット43とはトラクタ1に搭載する。コントローラ40は、トラクタ1が圃場の進入口にあるときに基準位置情報を外部サーバ44から取得し、このときの測定位置情報と基準位置情報とから補正情報を算出し、補正情報と測定位置情報とに基づいて、トラクタ1の現在の自己位置情報を算出する。
(もっと読む)
1 - 20 / 25
[ Back to top ]