
Fターム[2F105BB01]の内容
Fターム[2F105BB01]の下位に属するFターム
感度向上 (338)
ノイズ低減 (509)
安定化 (320)
ダイナミックレンジの拡大 (18)
Fターム[2F105BB01]に分類される特許
1 - 20 / 97
姿勢角演算装置、姿勢角演算方法、及びプログラム
【課題】高速で姿勢角度を算出すること。
【解決手段】姿勢角演算装置は、移動体の状態量を検出する状態検出手段と、状態検出手段により検出された移動体の状態量に基づいて、移動体の姿勢を示す四元数を算出する四元数算出手段と、四元数算出手段により算出された四元数におけるヨー軸成分をキャンセルして四元数の修正を行った修正四元数(Qmod=w+xi+yj+zk)を算出する修正手段と、修正手段により算出された修正四元数に基づいて、近似式を用いて移動体のロール角α及びピッチ角βを高速に算出する姿勢角計算手段と、を備えている。
(もっと読む)
物理量検出装置および電子機器

【課題】物理量の入力に対して、高い線形性をもって容量素子の構造体が変位する物理量検出装置を提供すること。
【解決手段】物理量検出装置は、物理量に応じて変位する構造体を有し、前記構造体の変位に応じて静電容量が変化する物理量検出素子と、前記物理量検出素子に一定の電荷を供給する電荷供給回路と、前記電荷供給回路により電荷が供給された後で、前記物理量検出素子の静電容量に応じた信号を出力する出力回路とを有する。
(もっと読む)
姿勢推定装置
【課題】 異なる複数のセンサの各出力に対し、各センサの線形動特性の逆伝達関数を用いて補償すると共に、この逆伝達関数に対応したフィルタを施し、最終的に姿勢変換を行うようにして、姿勢推定を適切且つ高精度に行える姿勢推定装置を提供する。
【解決手段】 角速度センサ10と傾斜計20の各逆モデルを動特性補償部分と姿勢変換部分とに分け、センサ動特性については近似線形特性として伝達関数を同定し、その逆伝達関数を用いて特性を補償すると共に、逆伝達関数に対応してフィルタを設計し、且つ出力信号への姿勢変換演算の前にフィルタを施すようにすることから、逆伝達関数を用いた特性補償で、有効周波数領域の拡大を図りつつ、逆伝達関数とフィルタの伝達関数の積についてはプロパーな伝達関数とすることができ、確実な演算処理で姿勢推定が実行でき、複数のセンサを用いる相補フィルタの手法で精度のよい姿勢推定を行える。
(もっと読む)
角速度センサ
【課題】角速度の検出精度の高い角速度センサを提供する。
【解決手段】角速度に基づき、センサ電流を出力するセンサ素子と、全ての前記センサ電流をチョッピングすることによって検波し、チョッパ電流を出力するチョッパ回路と、積分器の第一出力電圧及び第二出力電圧が0ボルトになるように、ラッチ電圧に基づき、前記チョッパ電流と定電流とを加算するか減算するかし、加減算電流を出力する定電流加減算回路と、前記加減算電流に基づく電荷を差動で積分し、前記第一出力電圧及び前記第二出力電圧を出力する前記積分器と、前記第一出力電圧と前記第二出力電圧とを比較し、出力電圧を出力するコンパレータと、クロック信号に基づき、前記コンパレータの出力電圧をラッチし、前記ラッチ電圧を出力するラッチと、を備える。センサ素子の角速度に基づく全てのセンサ電流Iaが、積分器の積分の対象として使用される。
(もっと読む)
リングレーザジャイロ装置
【課題】リングレーザジャイロブロックの速やかな起動を実現する。
【解決手段】リングレーザジャイロブロック200の個体に対応した固有制御パラメータを格納したEEPROM400を備え、固有制御パラメータに基づいて駆動制御が行われるリングレーザジャイロ装置において、デジタル論理100によって構成した起動制御回路50を設ける。起動制御回路50は予め決定された共通制御パラメータ52を有しており、電源投入後、ディザ制御部30に共通制御パラメータを出力する。ディザ制御部30は共通制御パラメータに基づき、ディザ機構を起動制御する。
(もっと読む)
電荷電圧変換回路、検出装置及び電子機器
【課題】電荷電圧変換後の電圧信号のS/Nを向上する電荷電圧変換回路、検出装置及び電子機器等を提供すること。
【解決手段】電荷電圧変換回路は、キャパシターC1と、差動電流信号を構成する第1の信号ISPが供給される第1の入力ノードNI1と、キャパシターC1の一端側のノードである第1のノードN1との間に設けられる第1の入力用スイッチ素子NI1と、差動電流信号を構成する第2の信号ISMが供給される第2の入力ノードNI2と、第1のノードN1との間に設けられる第2の入力用スイッチ素子NI2と、キャパシターC1に蓄積された電荷に対応する電圧信号を出力するための出力用スイッチ素子SQ1と、を含む。
(もっと読む)
車両用現在位置検出装置
【課題】角速度に対する出力電圧特性が非線形のジャイロスコープを用いても、精度よく車両の走行軌跡を推定できるようにする。
【解決手段】角速度センサ22の出力値のゲイン誤差として、角速度センサ22の車両への取り付け角度を要因とする取り付け角ゲイン誤差と、角速度センサ22の角速度に対する非線形ゲイン特性を要因とする角速度ゲイン誤差とを区別して推定する。すなわち、カルマンフィルタAにより取り付け角ゲイン誤差を推定した後、カルマンフィルタBにより取り付け角ゲイン誤差および角速度ゲイン誤差の推定を実施する。
(もっと読む)
圧電体薄膜とその製造方法、インクジェットヘッド、インクジェットヘッドを用いて画像を形成する方法、角速度センサ、角速度センサを用いて角速度を測定する方法、圧電発電素子ならびに圧電発電素子を用いた発電方法
【課題】圧電特性の良い非鉛材料薄膜を実現するために、結晶配向性に優れた(Na,Bi)TiO3−BaTiO3薄膜およびその製造方法を提供すること。
【解決手段】基板12上の(111)面方位である電極膜13上に形成された、
ペロブスカイト型複合酸化物(Na,Bi)TiO3−BaTiO3圧電体層15において、電極膜13との界面に隣接して、(111)面方位である(NaxBi0.5)TiO0.5x+2.75−BaTiO3(0.29≦x≦0.4)界面膜14を設けている。本発明による(Na,Bi)TiO3−BaTiO3圧電体層15は、(111)面方位にのみに強く結晶配向することで優れた圧電特性を示し、鉛を含まない元素による圧電体薄膜を提供することができ、インクジェットヘッド、角速度センサ、圧電発電素子等への応用が可能となる。
(もっと読む)
水晶振動子の製造方法
【課題】漏れ調整と離調度調整をひとつのエッチング工程によって実現し、漏れ振動が抑制され、且つ、適正に離調度調整された高性能な水晶振動子の製造方法を提供する。
【解決手段】水晶を所定の外形形状に加工する外形加工工程と、外形形状に電極を形成する電極形成工程と、漏れ量を測定する工程ST3と、離調度を測定する工程と、離調度の測定結果に基づいた時間エッチングを行い、外形形状を加工するエッチング工程と、を備え、エッチング工程は、エッチング時間と漏れ量測定工程の測定結果とに応じた形状のマスクを用いて外形形状のエッチングを行う漏れ量調整工程を有する水晶振動子の製造方法とした。
(もっと読む)
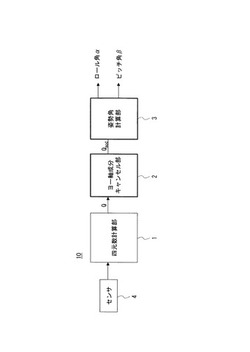
電荷変化型センサの出力回路
【課題】絶縁抵抗や入力インピーダンスによる測定誤差(感度低下)を低減するとともに、電荷変化型センサあるいはセンサケーブル回路の故障(断線、短絡)を検知できる電荷変化型センサの出力回路を提供する。
【解決手段】電荷変化型センサの出力回路は、電荷変化型センサの出力にセンサケーブルを介して接続する反転入力(−)と、基準電位Vinに接続する非反転入力(+)と、反転入力(−)に第1抵抗R1を介して接続する出力とを有するオペアンプ24と、電荷変化型センサの出力とグランドとの間に接続される第2抵抗R2とを備え、オペアンプ24は、電荷変化型センサが保有する電荷量ΔQに応じて変化する検出信号Voutを出力する。
(もっと読む)
同期放射線耐性強化光ファイバジャイロスコープ
【課題】同期放射線耐性強化光ファイバジャイロスコープを提供する。
【解決手段】同期光ファイバジャイロスコープ100は、光源102と、光源と光通信する光カプラ104と、光カプラと光通信する光学変調器106と、光学変調器と光通信する光ファイバコイル116とを含む。検出器118は、光カプラからの光信号を受け取り、光信号を電気信号に変換する。ループクロージャ信号プロセッサ124は、検出器からの電気信号を受け取る第1の入力部を有する。位相ロックループ130は、プロセッサの第2の入力部に動作可能に接続される出力部を有する。直接デジタル合成器は位相ロックループの入力部に動作可能に結合され、合成器は位相ロックループに送出される低周波信号を生成する。位相ロックループは、低周波信号を、プロセッサの第2の入力部に送出される高周波信号に変換し、位相ロックループは信号復調と同期する信号変調を行う。
(もっと読む)
振動片、振動子、物理量センサー、および電子機器
【課題】捩れ振動する振動片を備えた精度の高い物理量センサーを提供する。
【解決手段】振動片100は、捩れ振動モードで振動し、且つ、互いに並んでX軸方向に伸長した第1駆動梁11および第2駆動梁12と、第1駆動梁11および第2駆動梁12の一端同士および他端同士を結合する支持部21,22と、X軸方向に対し直交するY軸方向に第1駆動梁11および第2駆動梁12の各々から伸長した第1検出腕31と第2検出腕32と、を備え、駆動モードにおいて、第1駆動梁11および第2駆動梁12は互いに逆方向に捩れ振動し、第1検出腕31および第2検出腕32は、Z軸方向に振動し、且つ、第1検出腕31および第2検出腕32は、互いに同じ方向に振動し、検出モードにおいて、Y軸方向まわりに角速度が加わったときに、第1検出腕31および第2検出腕32は、X軸方向に振動する。
(もっと読む)
光ファイバジャイロスコープにおける限られた電源品質でジャイロスコープ誤差を低減するシステム
【課題】光ファイバジャイロスコープにおける限られた電源品質でジャイロスコープ誤差を低減するシステムを提供する。
【解決手段】光ファイバジャイロスコープは、光源と、光源と光通信し、光源から光信号を受信するように構成された光結合器と、光結合器と光通信する光変調器とを備える。復調器は、光変調器と光通信する光ファイバコイル、光結合器から光信号を受信し、該光信号を電気信号に変換するように構成される。ループクロージャ電子機器モジュールは、復調器から電気信号を受信するように構成される。バイアス変調器は、ループクロージャ電子機器モジュールからの出力に応答し、光変調器に変調信号を出力するように構成される。第1のクロストークフィルタネットワークは、復調器に動作可能に結合され、第2のクロストークフィルタネットワークは、バイアス変調器に動作可能に結合される。
(もっと読む)
センサ装置
【課題】本発明は、センサ装置の検出精度を向上させることを目的とする。
【解決手段】そして、この目的を達成するために本発明は、位相調整部30が前記ドライブ入力処理部10の温度特性と検波部21の温度特性との差を用いてドライブ信号の位相を調整する構成としたものである。この構成により、ドライブ入力処理部10や検波部21が温度特性を持っていても、位相調整部30がドライブ入力処理部10の温度特性と検波部21の温度特性との差を用いてドライブ信号の位相を調整するため、ドライブ信号とセンス信号との周波数ずれの発生を抑制することができ、正しい検波を可能とすることができるため、その結果としてセンサ装置の検出精度を向上させることができるのである。
(もっと読む)
角速度センサユニットおよびその信号検出方法
【課題】本発明は、コリオリ力を利用した角速度センサユニットおよびその信号検出方法に関し、角速度センサユニットの検出精度の劣化を抑制することを目的とする。
【解決手段】この目的を達成するために、角速度を検出する振動型のセンサ素子1およびそれを制御するIC2を内蔵するパッケージとからなる角速度センサユニットにおいて、センサ素子1は駆動アーム5にドライブ電極6、モニタ電極7、センス電極8を設けるとともに、駆動アーム5を支持する支持アーム16に設けられたモニタ電極7の配線電極19に補正電極20を設け、不要振動によりモニタ電極7に形成された不要信号を、同じ不要振動により補正電極20に形成された補正信号で減衰させる構造としたものである。
(もっと読む)
角速度センサ
【課題】本発明は、センス電極の周りの回路パターンが断線した場合に、角速度に対応しない出力信号を出力し続けてしまうということはなく、信頼性の向上した角速度センサを提供することを目的とするものである。
【解決手段】本発明の角速度センサは、第1のセンス電極34と第1の積分回路56との間に、電荷を注入する第1の電圧源77を第1の断線検知スイッチ78を介して設けるとともに、第2のセンス電極35と第2の積分回路67との間に、電荷を注入する第2の電圧源79を第2の断線検知スイッチ80を介して設けたものである。
(もっと読む)
1つ以上の応力感応性構成要素を1つ以上の応力から緩衝するため空隙を重合系材料内に導入する方法
【課題】光ファイバジャイロスコープの光ファイバコイルを保護するポッティングコンパウンドからの反発力がセンサファイバに加わることを減少する重合系材料を提供する。
【解決手段】複数の空隙208が重合系材料204内に導入される。重合系材料の一部分と当接した1つ以上の光ファイバ202は、複数の空隙の1つ以上の空隙を備える重合系材料の部分を採用することを通じて、1つ以上の応力から緩衝される。重合系材料の部分の動きには、1つ以上の空隙の1つ以上を圧縮することを通じて対応する。
(もっと読む)
3軸角速度検出振動子、3軸角速度検出装置および3軸角速度検出システム
【課題】1つの振動子で、コリオリ力を利用して3軸方向の角速度を検出可能な3軸角速度検出振動子、3軸角速度検出装置および3軸角速度検出システムを提供する。
【解決手段】正方形状に配置された4本の振動アーム11〜14と、正方形状の頂点より対角線方向に伸びた4本の検出アーム21〜24とを備え、4本の振動アーム11〜14の振動によって生じる検出アームの21〜24形状の歪みを検知して、振動アーム11〜14に加わった3軸角速度を検出する。z軸を回転軸として振動アームが回転した場合に、z軸方向と垂直なx−y方向に働くコリオリ力により発生する検出アーム21〜24の形状の歪みを検出する。x(y)軸方向を回転軸として振動アーム11〜14が回転した場合に、z軸方向に働くコリオリ力により発生する検出アーム21〜24の形状の歪みを検出する。
(もっと読む)
MEMS構造体及びその製造方法
【課題】振動体と検出電極との位置ずれを抑えることで静電容量変化の検出精度をより高くすることのできるMEMS構造体及びその製造方法を提供する。
【解決手段】支持構造部11と前記支持構造部11に対して変位可能に支持された振動体12bとからなる振動体部1Aと、基板21と前記基板21上に形成された検出電極22aとからなる検出電極部2Aとを備えるとともに、振動体12bと検出電極22aとが間隔を空けて対向するようにして前記振動体部1Aと前記検出電極部2Aとが接合され、振動体12bと検出電極22aとの間の静電容量の変化を検出するように構成されたMEMS構造体において、振動体部1Aにおける検出電極部2Aとの対向面に、検出電極部2Aの外周形状に嵌合する内周形状を持つ振動体部側の凹部15が形成されていることにより、振動体部1Aと検出電極部2Aとの接合時に生じる振動体12bと検出電極22aとの位置ずれを抑えることができるようにしている。
(もっと読む)
3軸検出角速度センサ
【課題】本発明の3軸検出角速度センサは、Y軸方向の駆動信号とZ軸方向の駆動でかつX軸周りの角速度により発生するY軸方向のコリオリ力による検出信号とが同一位相となることのないX軸方向、Y軸方向およびZ軸方向の角速度を正確に検出可能な3軸検出角速度センサを提供することを目的とするものである。
【解決手段】駆動回路49に位相シフト回路55bを設け、Z軸方向に振動駆動させる駆動信号とY軸方向に振動駆動させる駆動信号とが互いに90度以外の異なる位相となるように構成したものである。
(もっと読む)
1 - 20 / 97
[ Back to top ]