
Fターム[3C007BT11]の内容
マニピュレータ、ロボット (46,145) | 手首のタイプ (749) | 手首軸 (426) | ハンドの向きを一定に保つもの (109)
Fターム[3C007BT11]に分類される特許
41 - 60 / 109
伸縮アーム
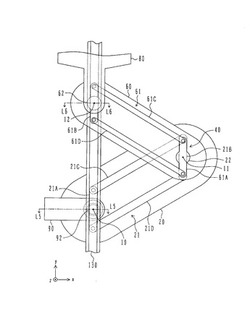
【課題】 プーリとベルトとを用いることなく、安定した動作を行うことが可能な伸縮アームを提供する。
【解決手段】 第1腕要素(20)が、第1回転中心(10)を中心として回転可能であり、第2回転中心(11)を画定する。第2腕要素(60)が、第2回転中心を中心として回転可能であり、第3回転中心(12)を画定する。第1平行リンク機構(21)で画定される相互に平行な一対の辺の一方が第1回転中心を中心として回転可能であり、他方が第2回転中心を中心として回転可能である。第2平行リンク機構(61)が画定する相互に平行な一対の辺の一方が第2回転中心を中心として回転可能であり、他方が第3回転中心を中心として回転可能である。関節機構(40)が、第1平行リンク機構の、第1回転中心を通過するリンクの姿勢を固定した状態で、第1腕要素が第1角度だけ回転したとき、第2腕要素を第1腕要素に対して、第1腕要素とは反対向きに、第1角度の2倍の角度だけ回転させる。
(もっと読む)
ワーク移送装置

【課題】特に高さに制約がある加工機に対し、ワークの搬送、装填、取り出しを容易に達成できるようにした、ワーク移送装置を提供する。
【解決手段】第1案内枠12aと第2案内枠12bに沿って、それぞれ往復動可能に介装した第1、第2スライダ13、14を介して取付けたアーム17を、第1、第2スライダ13、14に連結した第1シリンダ15と第2シリンダ16により、傾斜移動させ、アーム他端側の把持手段20をプレス装置1に干渉しないように、楕円曲線を描くように把持したワークWを搬送させ、待機位置から加工位置に移載し、且つ取出し位置に移載する。
(もっと読む)
搬送装置および大型搬送装置
【課題】基台と搬送レベルとが異なる場合でも、第1アームと第2アームを同調させてほぼ直線的にワークを搬送できる搬送装置を提供する。その搬送装置を利用した大型搬送装置を提供する。
【解決手段】基台11に第1アーム12を第1軸J1廻りに回動自在に設け、第1アーム12の先端に、第1アームと長さが異なる第2アーム13を第2軸J2廻りに回動自在に設け、第2アーム13の先端にハンド14を取り付け、第1アーム12を往復揺動駆動する第1モータM1を基台11に設ける。基台11には第1軸J1と同心状に第1ピニオン16を固定し、第2アーム13の基端に、第2軸J2と同心状に第2ピニオン17を固定し、第1ピニオン16と第2ピニオン17の左右両側にラック18、19を摺動自在に設けて搬送装置10を構成する。2基の搬送装置10を一対で配置し、ハンド14同士を搬送ビームで連結することにより、大型搬送装置を構成する。
(もっと読む)
ワーク搬送ロボットおよび搬送方法
【課題】 本発明は、ワーク搬送ロボットを大型化することなく、高速搬送を可能とするハンドリングロボットを提供するものである。
【解決手段】水平に回転可能な第1アーム10と、前記第1アーム10の先端に前記第1アーム10の回転軸と平行な軸に回転支持された回転可能な第2アーム17と、前記第2アーム17の先端部に前記第2アーム17の回転軸と平行な軸に回転可能なフランジ21と、前記フランジ21にワーク把持部25とを備えたワーク搬送ロボットにおいて、前記第1アーム10の回転軸と平行な前記軸に少なくとも2つの出力軸を備えた減速機構16,20を備えたものである。
(もっと読む)
産業用ロボット
【課題】機械的な構成で搬送対象物を把持する場合であっても、小型化を図ることが可能な産業用ロボットを提供すること。
【解決手段】ロボット1は、ハンド3、4と、ハンド3、4を保持するハンド保持アーム7を含む多関節アーム部5とを備えている。ハンド3、4は、ウエハ2に当接してウエハ2を把持する把持部42、52と、ウエハ2を把持する方向へ把持部42、52を付勢する付勢部材とを備え、ハンド保持アーム7は、多関節アーム部5の伸縮動作に伴って、ハンド3、4に対して相対回動するカム部材を備えている。カム部材の内周側には、把持部42、52が当接するカム面が、収納部からウエハ2を搬出する前に把持部42、52をウエハ2から退避させるとともに、収納部からウエハ2を搬出する際の多関節アーム部5の伸縮動作に伴って、ウエハ2を把持する方向へ把持部42、52を移動させるように形成されている。
(もっと読む)
産業用ロボット
【課題】旋回径を小さくしつつ、1回の搬入動作あるいは搬出動作で複数の搬送対象物を搬送することが可能な産業用ロボットの具体的な構成を提供すること。
【解決手段】ロボット1は、複数の搬送対象物2を搭載する第1ハンド3、第2ハンド4と、第1ハンド3、第2ハンド4をそれぞれ保持する第1アーム5、第2アーム6と、第1アーム5および第2アーム6を保持する共通アーム7と、共通アーム7に対する第1アーム5、第2アーム6のそれぞれの回動中心となる第1回動中心部31、第2回動中心部41と、共通アーム7を保持する本体部とを備えている。第1ハンド3と第2ハンド4とはロボット1の旋回動作時に重なるように配置され、第1ハンド3および第2ハンド4には、第1回動中心部31および第2回動中心部41との干渉を防止するための逃げ部43、44が形成されている。
(もっと読む)
搬送用ロボット
【課題】機器間のスペースが少なくても設置することができ、且つ、製造コストを少なくすることができる搬送用ロボットを提供すること。
【解決手段】第1アーム14の基端を基部11に対して回転可能に連結すると共に、第1アーム14の先端を第2アーム16に対して回転可能に連結した。また、第1アーム14の回転軸(第1回転軸13)と、第2アーム16の回転軸(支軸15)を平行にした。そして、基部11に第1プーリ24を固定すると共に、支軸15を中心として、第2プーリ25を第2アームと一体的に回転するように固定した。さらに、第2アームの基端に、第1アーム14に対して回転しないように第3プーリ28を固定すると共に、第2回転軸32を中心として、保持部が取り付けられる第4プーリ30を第2アームの先端に回転可能に固定した。
(もっと読む)
ワーク搬送装置
【課題】ロボットのアーム伸縮動作時における急停止によって各部材に生じる応力で、各部材を破損しないようにする。
【解決手段】複数軸で構成されたロボットの動作を制御する制御装置において、アームの伸縮動作時における急停止によって各部材に生じる応力が各部材の強度を超えないように、アームの上下移動位置に従って予め許容されるアームの許容動作速度が設定され、アーム軸回転駆動源の駆動でアームの伸縮動作をする際の前記アームの伸縮動作する速度は前記アームの上下移動位置に基づいて求める前記アームの許容動作速度を超えないように速度制限する速度制御手段を備えるように構成した。
(もっと読む)
基板搬送ロボット
【課題】基板が損傷しない基板搬送ロボットを提供する。
【解決手段】第一、第二の従動アームによって回転され、互いに歯合した第一、第二の規制ギアに対し、それぞれ歯合する第一、第二のピニオンギアを設け、第一、第二のピニオンギアでピニオンギア用ラックを挟む。ハンドが放射方向外側から内側に向けて移動し、ハンドが搬送室内に位置する状態では、ピニオンギア用ラックは放射方向外側に移動し、緩衝部材を介して基板を押圧し、基板をクランプする。ハンドが放射方向外側に移動し、処理室内に位置するときは、ピニオンギア用ラックは放射方向内側に移動し、クランプは解除される。搬送室内でクランプされているので高速移動が可能である。
(もっと読む)
衝突トルク緩衝機構を備えた基板搬送ロボット
【課題】ハンドが衝突した際に発生する力を逃がす機構(衝突トルク緩衝機構)を提供することで、アーム側への力の伝達を緩衝させる。
【解決手段】ハンド28とアーム27の先端との間にあって、ハンド28に固定されるハンド側フランジ部52と、アーム27の先端に固定されるとともに、一定の摩擦力によってハンド側フランジ部52と相対的に回転しないよう前記ハンド側フランジ部52を保持するアーム側フランジ51と、を備え、ハンド28の衝突時の衝突回転トルクが前記摩擦力を超えたとき、ハンド側フランジ部51とアーム側フランジ部52とが滑り出すようにした。
(もっと読む)
平行リンク駆動機構及びこの駆動機構を備えた搬送装置
【課題】アームの長さを長くしても小さい駆動力でスムーズに移動できる駆動手段を有する平行リンク駆動機構を提供すること。
【解決手段】一対の第1、第2アーム41、42と、一対の第1、第2連結アーム43、44とを平行に配設し、第1、第2連結アームのいずれか一方を静止アーム、他方を運動アームとして、静止アームの端部と第1、第2アームの一端部とを第1、第2支軸61、62及び第1、第2アームの他端部と運動アームの他端とを第3、第4軸支63、64をそれぞれ回動自在に支軸した平行リンク機構3と、この平行リンク機構を駆動する駆動手段と、を有し、静止アーム43には駆動手段GMを設け、駆動手段と運動アームの第3、第4支軸63、64との間に、伝動部材5を襷掛けに懸架して、駆動手段GMの駆動により、第3、第4支軸63、64のいずれか一方の支軸に結合された部分の伝動部材5A、5Bを牽引して運動アーム44を移動させる。
(もっと読む)
多関節ロボット
【課題】本発明は上下移動軸からの発塵による基板の汚染を防止するとともに、生産性を向上させた液晶用のガラス基板や半導体ウェハ等の薄板状のワークをストッカに出し入れする多関節ロボットを提供する。
【解決手段】搬送物を載置するハンド部(8)と、前記ハンド部(8)と連結され、少なくとも2つ以上の回転関節(3)、(4)、(5)を備え、前記ハンド部(8)を1方向に移動するように伸縮し、軸方向に対向するように配置された多関節アーム(1)と、前記多関節アーム(1)と上下に移動する移動機構(11)とを連結する支持部材(10)と、前記移動機構(11)に備えられた旋回機能を有する台座(13)とからなる多関節ロボット(1)において、前記移動機構(11)は、前記ハンド部(8)の移動方向と同方向にコラム(12)が配置され、前記移動機構(11)に配置された支持部材(10)は、前記ハンド部(8)の移動方向に直交する方向に突出し、前記多関節アーム(2)と連結されたものである。
(もっと読む)
産業用ロボット
【課題】機械的な構成で搬送対象物を把持しても、搬送対象物に与える衝撃を抑制することが可能な産業用ロボットを提供すること。
【解決手段】ロボット1は、ウエハ2を搭載するハンド3と、ハンド3を保持する第2アーム6を有する多関節アーム部4とを備えている。ハンド3は、ウエハ2を把持するための把持部28と、ウエハ2を把持する方向へ把持部28を付勢する付勢部材とを備え、第2アーム6は、ハンド3の回動中心から偏心した位置に固定され、ウエハ2の搬出開始前に把持部28に当接して把持部28をウエハ2から退避させる偏心部材31を備えている。偏心部材31は、ウエハ2を搬出する際の多関節アーム部4の伸縮動作に伴って、把持部28がウエハ2を把持する方向へ移動するように、把持部28に対して相対移動し、把持部28は、ウエハ2を搬出する際の多関節アーム部4の伸縮動作の減速時に、ウエハ2の把持を開始する。
(もっと読む)
機械的スイッチ機構を利用する複数の可動アームを有する基板搬送装置
基板搬送装置は、フレームと、該フレームに接続され、かつ少なくとも1つの独立して制御可能なモータを含む駆動部と、該フレームに接続され、かつ基板を支持および搬送するように分配されるアームリンクを備える少なくとも2つの基板搬送アームと、該少なくとも2つの基板搬送アームのうちの一方が実質的に収縮形状のままである間に、該少なくとも2つの基板搬送アームのうちの1つの伸長および収縮を生じさせるように、該少なくとも1つの独立して制御可能なモータおよび該少なくとも2つの基板搬送アームに連結される機械運動スイッチとを含む。  (もっと読む)
(もっと読む)
産業用ロボット及び集合処理装置
【課題】各アームを独立して動作させるとともに、各アームの上下方向の座標位置を同じにして、ワークの搬送時間等を短縮することができる産業用ロボットを提供する。
【解決手段】基台部100側からアーム部2及びハンド部3の順で連結され、そのハンド部3を所定方向に向けながら伸縮自在に動作するアーム10を2つ以上有する産業用ロボットであって、アーム10A,10Bそれぞれは、アーム伸縮軸2A,2Bを回動中心としてアーム10A,10Bを伸縮させるアーム伸縮用駆動源4A,4Bと、アーム旋回軸3A,3Bを回動中心としてアーム10A,10Bを旋回させるアーム旋回用駆動源5A,5Bと、ハンド部12の上下方向の座標位置P1,P2をほぼ同じにする連結部材13A,13Bとを備えるように構成して、上記課題を解決した。
(もっと読む)
複数の独立可動関節アームを伴う基板搬送装置
少なくとも1つの駆動軸を有する駆動部と、少なくとも1つの駆動軸に動作可能に連結される少なくとも2つのスカラアームと、を有する基板搬送装置であって、少なくとも1つの駆動軸は、少なくとも2つのスカラアームの伸長および収縮を生じさせる少なくとも2つのスカラアームのための共通駆動軸であり、少なくとも2つのスカラアームは、少なくとも2つのスカラアームに連結される少なくとも1つの駆動軸によって、駆動軸の回転が、少なくとも2つのスカラアームのうちの別の1つの運動に実質的に関係なく、少なくとも2つのスカラアームのうちの1つの伸長および収縮を生じさせるように、互いに連結される。  (もっと読む)
(もっと読む)
伸縮アーム
【課題】 プーリとベルトとを用いることなく、安定した動作を行うことが可能な伸縮アームを提供する。
【解決手段】 第1腕要素(20)が、第1回転中心(10)を中心として回転可能であり、第2回転中心(11)を画定する。第2腕要素(60)が、第2回転中心を中心として回転可能であり、第3回転中心(12)を画定する。第1平行リンク機構(21)で画定される相互に平行な一対の辺の一方が第1回転中心を中心として回転可能であり、他方が第2回転中心を中心として回転可能である。第2平行リンク機構(61)が画定する相互に平行な一対の辺の一方が第2回転中心を中心として回転可能であり、他方が第3回転中心を中心として回転可能である。間接機構(40)が、第1平行リンク機構の、第1回転中心を通過するリンクの姿勢を固定した状態で、第1腕要素が第1角度だけ回転したとき、第2腕要素を第1腕要素に対して、第1腕要素とは反対向きに、第1角度の2倍の角度だけ回転させる。
(もっと読む)
対象物保持アーム
【課題】 半導体ウエハ等の保持対象物の往復運動方向の位置精度を高めることができる保持アームを提供する。
【解決手段】 第1の腕要素(20)が、第1の回転中心(10)を中心として、回転可能に支持され、先端に第2の回転中心(11)を画定する。第2の腕要素(60)が、第2の回転中心を中心として、第1の腕要素に対して回転可能に支持され、先端に第3の回転中心(12)を画定する。伸縮用駆動力発生機構(57)が、第1の腕要素に対して第2の腕要素を回転させる。伸縮用駆動力発生機構によって、第2の腕要素が第1の角度だけ回転したとき、第1の腕要素が、第2の腕要素の回転方向とは反対方向に、第1の角度の1/2の角度だけ回転する。保持部材(80)が、第3の回転中心を中心として、第2の腕要素に対して回転可能に支持される。第1及び第2の腕要素の姿勢を変化させたとき、保持部材が並進移動する。
(もっと読む)
基板搬送ロボット
【課題】基板搬送ロボットのアーム部の基端側を同一点に取付けアーム類に負荷をかけずに基板ホルダーが取付けられるアーム部の先端側が直線運動するようにし、アーム部に装着されるベルト張力を一定にし基板ホルダーがアーム部先端側取付点を支点に回転するのを防止する。
【解決手段】駆動部に結合される二軸の同軸構造型シャフトの各軸にそれぞれ基端側が結合される左右一対の第一アーム及び第一アームと同一の長さで第一アームの先端側に関節部を介してそれぞれの基端側が結合される左右一対の第二アームからなるアーム部と、第二アーム先端側に取り付けられる基板ホルダーとを備え、第一、第二アームの回転運動により基板ホルダーが移動する基板搬送ロボット。基板ホルダーとアーム部との間に第二アーム先端部が取付けられている位置を中心とする回転を防止する回動防止手段を有する。
(もっと読む)
五節リンク型ハプティックデバイス
【課題】XY軸とZ軸の操作が干渉しない五節リンク型ハプティックデバイスを提供する。
【解決手段】五節リンク機構2を有する五節リンク型ハプティックデバイスにおいて、五節リンク機構2の所定位置に設けられ五節リンク機構2を操作する操作部3と、Z軸方向を指示する回転型指示機構4とを備え、操作部3の姿勢を五節リンク機構2の姿勢によらず一定にするための平行リンク機構5とを備えた構成とすることで、XY軸とZ軸の操作が干渉しないようにする。。
(もっと読む)
41 - 60 / 109
[ Back to top ]