
Fターム[3C007CY40]の内容
マニピュレータ、ロボット (46,145) | 本体機構の目的 (1,591) | 機敏性の向上、高速性の向上 (33)
Fターム[3C007CY40]に分類される特許
1 - 20 / 33
基板搬送装置およびそれを備えた基板処理装置、ならびに基板搬送方法
【課題】基板の高速搬送に適した基板搬送装置を提供する。
【解決手段】基板処理装置は、基板を保持するハンド23A,23Bと、ハンド23A,23Bを駆動するハンド駆動機構20,26,27と、ハンド23A,23Bの動作を補助するように気体を噴射する気体ノズルを有する動作補助ユニット10A,10Bとを含む。動作補助ユニット10A,10Bは、ハンド23A,23Bに備えられており、気体噴射により生じる反力によって、ハンド23A,23Bの動作を補助する。
(もっと読む)
搬送装置、基板処理システム及び姿勢制御機構

【課題】保持台の姿勢を正確に制御することができ、また高速で移動させても保持台がふらつくことがない搬送装置を提供する。
【解決手段】搬送装置に、第一の姿勢保持リンク56、及び第二の姿勢保持リンク57を設ける。第一の姿勢保持リンク56の一端と第二の姿勢保持リンク57の一端とは連結軸53によって回転可能に連結される。保持台21の基部プレート27にレール51,52を取り付ける。連結軸53にローラ54,55を所定の軸線の回りを回転可能に取り付ける。ローラ54,55はレール51,52のローラ転走部51a,52aに接触するように配置される。保持台21を移動させるとき、ローラ54,55がローラ転走部51a,52aを転がり運動する。
(もっと読む)
搬送装置および搬送方法
【課題】搬送工程の自動化を容易とし、効率よくワークを搬送することのできる搬送装置および搬送方法を提供する。
【解決手段】ワーク8を把持して搬送する搬送装置1である。搬送装置1は、ワーク8に設けられた2箇所の係合部に係合可能な2つの被係合部31、33を備えた把持部2と、把持部2を移動させる移動手段とを有する。把持部2を、移動方向へ移動させる際には、把持部2の被係合部31、33を結ぶ基準直線が移動方向の水平方向成分の方向と平行とし移動させるよう構成されている。
(もっと読む)
多自由度移動体
【課題】可動部を高速移動できるようにする。
【解決手段】ベース部10と可動部5との間の距離が変化しても、伸縮リンク機構により構成された伝達機構7が伸縮して距離の変化に対応しつつ、電動機2dの回転運動を回転部8に伝達することができる。伸縮リンク機構として構成した伝達機構7は軽量なカーボン製とすることができるため、伝達機構7を軽量化でき、その結果、可動部5を高速動作させることが可能な多自由度移動体1を実現できる。
(もっと読む)
カバー付きロボットハンド
【課題】搬送中のワークの落下や位置ずれを防止しつつワークの高速な搬送を可能にするカバー付きロボットハンドを提供する。
【解決手段】搬送されるワーク13を把持するカバー付きロボットハンド12が、ロボットアーム11の先端に取り付けられる基部14と、基部14に配置され且つワーク13を把持する把持部15と、基部14に配置されたカバー16と、把持部15に対するカバー16の相対位置を変更するカバー位置変更部16dとを具備し、カバー位置変更部16dが、カバー16の相対位置を、ワーク13の搬送中にワーク13の一部を包囲する保護位置と、ワーク13を把持又は解放する際にワーク13の把持又は解放を阻害しない開放位置との間で変更する。
(もっと読む)
ワイヤ駆動式ロボット
【課題】 駆動源を可動部に搭載することなく複数方向への移動に対して正確で且つ迅速な制御を行い得る小型のワイヤ駆動式ロボットの提供。
【解決手段】 XθZ駆動方式のワイヤ駆動式ロボットにおいて、ロボットアームを旋回させるθ回転手段を備える昇降ベースと、昇降ベースの昇降軌道をZ軸方向に規制する昇降ガイドと、昇降ガイドを支持する走行ベースと、走行ベースの走行軌道をZ軸と直角なX軸方向に規制する走行ガイドと、走行ガイドを支持するベースフレームと、昇降ベースにZ軸方向への駆動力を与えるワイヤ駆動方式のZ軸駆動手段と、走行ベースにX軸方向への駆動力を与えるワイヤ駆動方式のX軸駆動手段と、
からなり、Z軸駆動手段及びX軸駆動手段の昇降駆動源及び走行駆動源をベースフレームに備えることを特徴とするワイヤ駆動式ロボット。
(もっと読む)
関節装置及び基板搬送装置
【課題】俊敏な動作と高精度な位置制御を可能とする関節装置及び基板搬送装置を提供すること
【解決手段】本発明の関節装置は、第1の平行リンクと、第2の平行リンクと、伝達機構とを具備する。第1の平行リンクは、第1の支点を中心とする第1の回転が可能な第1のレバーと、第2の支点を中心とする第2の回転が可能な第2のレバーとを有する。第2の平行リンクは、第1の支点を中心とする第3の回転が可能な第3のレバーと、第2の支点を中心とする第4の回転が可能な第4のレバーとを有する。伝達機構は、第1の支点を中心として第1の回転と共に回転する第1のギアと、第2の支点を中心として第2の回転と共に回転する第2のギアと、第1のギア及び第2のギアに噛合して回転する第3のギアと、前記第3のギアの回転と第3の回転及び第4の回転とを同期させる連結部とを有し、第1の平行リンクの駆動と第2の平行リンクの駆動とを連動させる。
(もっと読む)
ツイストスライド機構及びロボット
【課題】スライド動作の俊敏性を低下させずにツイスト動作の俊敏性を向上させることが可能なツイストスライド機構及びロボットを提供する。
【解決手段】本発明のロボット10は、平行に配置された1対のボール螺子機構40,40における1対のベース駆動用ボールナット42,42を旋回ベース30と連結させた構成とすることで、それらボール螺子機構40,40を駆動する1対のベース駆動用サーボモータ81,81によって旋回ベース30のスライド駆動とツイスト駆動の両方を行うことができる。また、それら1対のベース駆動用サーボモータ81,81が共に固定ベース11に固定されているので、スライド動作の俊敏性の低下させずにツイスト動作の俊敏性を向上させることが可能になる。
(もっと読む)
移送ロボット
【課題】本発明は、2組のリンク機構から構成された、昇降機構において、リンクへの負荷を軽減する機構を提供する。
【解決手段】搬送物を載置するハンド部と、前記ハンド部と連結され少なくとも2つ以上の回転関節を備え前記ハンド部を一方向に移動するように伸縮し旋回軸方向に対向するように配置された2組の水平アームからなる水平アーム機構30と、前記水平アーム機構30の支持ベース8に連結され水平アーム機構30を昇降する少なくとも2組のリンク機構から構成される昇降機構20と、から構成され、前記支持ベース8と前記昇降機構20の第3関節部8bとの間には水平アーム機構30をX方向に移動自在に支持する直動機構が配置されたものである。
(もっと読む)
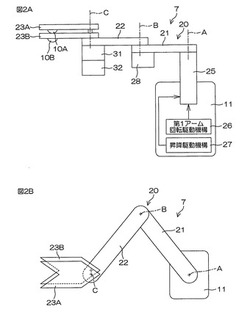
水平多関節ロボットおよびそれを備えた搬送装置
【課題】直動機構を用いることなくワークを出し入れすることができると共に、高速動作が可能で、かつ、低発塵、省スペース化に寄与する水平多関節ロボットおよびそれを備えた搬送装置を提供すること。
【解決手段】エンドエフェクタ20、第1アーム30、第2アーム40に、さらに第3アーム50を備え、第3アーム50を揺動回転動作させることによって、例えば、アクセス位置P1の軸線P1aの延長線上に第3回転軸N3がくるようにしてから直線状にエンドエフェクタ20を移動させてワークの出し入れを行う。
(もっと読む)
パラレルリンクロボット
【課題】動作可能領域及び加減速性能を小さくすることなしに、自由度を高める。
【解決手段】パラレルリンクロボット10は、基礎部11と、可動部12と、基礎部と可動部とを連結していて基礎部に対してそれぞれ1自由度を有する三つのリンク部20a〜20cと、リンク部のそれぞれを駆動する三つのアクチュエータ13a〜13cとを具備し、リンク部のそれぞれは、基礎部に連結された駆動リンク21a〜21cと、駆動リンクと可動部とを連結していて互いに平行な二つの受動リンク22a〜22c、23a〜22cとからなっており、さらに、可動部に付属する要素19の姿勢を変更する姿勢変更機構部15、少なくとも一つのリンク部の二つの受動リンクの間においてこれら受動リンクに対して平行に配置された追加アクチュエータ13dなどと、追加アクチュエータから同軸に延びていて回転駆動力を姿勢変更機構部に伝達する動力伝達軸部39とを含む。
(もっと読む)
産業用ロボット
【課題】2本のアームを個別に伸縮させることが可能であっても、2本のアームの伸縮動作や本体部に対する回動動作を安定させることが可能な産業用ロボットを提供すること。
【解決手段】第1アーム5は、第1アーム部11と、第1アーム部11に保持される第2アーム部12とを備え、第2アーム6は、第3アーム部13と、第3アーム部13に保持される第4アーム部14とを備えている。ロボット1では、第1アーム5と第2アーム6とを個別に伸縮させることが可能となっている。また、ロボット1では、第1アーム部11の回動中心と第3アーム部13の回動中心とは同軸上に配置されるとともに、第1アーム5と第2アーム6とは、第1アーム5および第2アーム6が縮んでいる状態で仮想線Lに対して略線対称になるように構成され、第1アーム部11と第3アーム部13と第2アーム部12と第4アーム部14とは、上下方向においてこの順番で配置されている。
(もっと読む)
産業用ロボット
【課題】動作速度の高速化などを図ることのできる産業用ロボットを提供する。
【解決手段】第1関節軸2を中空のボールねじスプラインシャフト12から形成すると共に、第1のアーム駆動用モータ8及び第2の作業軸駆動用モータ11を基台1内の固定ブラケット41に装着し、第2のアーム駆動用モータ9及び第1の作業軸駆動用モータ10を基台1内の可動ブラケット42に装着する。また、第2のアーム駆動用モータ9の回転トルクを第2関節軸4に伝える第1のプーリ軸27と第1の作業軸駆動用モータ10の回転トルクを作業軸6に伝える第2のプーリ軸34をボールねじスプラインシャフト12の内側に同軸に配置する。
(もっと読む)
スカラロボットの手首軸回転駆動機構
【課題】アームの質量及び慣性を低減可能として、アームとしての応答性能や位置決め精度を高く維持することのできるスカラロボットの手首軸回転駆動機構を提供する。
【解決手段】手首軸16にはそれを回転させるためのスプライン溝16sが形成されている。手首軸16の挿通されるスプラインナット22は、固定筒22aと回転筒22bからなり回転筒22bが回転されると、スプライン溝16sに嵌合されるベアリングを介して手首軸16が回転される。回転筒22bには第3モータM3の駆動力が回転動力の伝達機構により伝達される。すなわち第3モータM3からの回転動力が、基端側プーリ23からタイミングベルト26を介して先端側プーリ25に伝達され、同プーリ25に連動するピニオンギア27に噛合されるシザーズギア28から回転筒22bに伝達される。これにより、第3モータM3の正逆回転により手首軸16が正逆回転されるようになっている。
(もっと読む)
ロボットアームの関節機構
【課題】モータを健全な状態に維持でき、しかも静止摩擦トルクがなく応答性に優れたロボットアームの関節機構を提供する。
【解決手段】第1アーム1と、第1アーム1が固定子側に固定された第1モータユニット2と、第2アーム3と、第2アーム3が固定子側又は回転子側に連結された第2モータユニット4と、第1モータユニット2の回転子と第2モータユニット4の固定子又は回転子とに連結され、第2モータユニット4が回転駆動することによって、第1モータユニット2の回転子の回転力が第2アーム3に対して伝達されるのを防止する中間リンク13と、を備えている。
(もっと読む)
2足歩行ロボット
【課題】脚部2の下腿リンク9と足平部11とを足首関節部10から離れた部分で連結する直動アクチュエータ124の伸縮動作により足平部を下腿リンクに対し足首関節部を中心にして揺動させるようにした2足歩行ロボットにおいて、直動アクチュエータを大型化せずに階段歩行に必要な所要のモーメントを足平部に付与できるようにする。
【解決手段】直動アクチュエータ124は、該直動アクチュエータの伸縮力が膝関節部8と足首関節部10とを結ぶ結線L1に対し後傾した線L2上に作用するように配置される。好ましくは、直動アクチュエータ124の下腿リンク9に対する連結部Y3aを上記結線L1よりも後方に位置させ、直動アクチュエータ124の足平部11に対する連結部Y3bを上記結線L1よりも前方に位置させる。
(もっと読む)
産業用ロボット
【課題】
ロボット有効動作範囲を拡大することができ、ロボット制御特性が向上することができるとともにロボット負荷モーメントの低減を図ることができる産業用ロボットを提供する。
【解決手段】
ショックセンサユニット72の一部(ボディ本体74の軸線方向に位置する一部)がマニピュレータの手首部12に内蔵されている。揺動体24内に配置されたギヤ62及び回転体内に対してショックセンサユニット72の一部が嵌合されて配置されていることにより、手首部12に取付けされた部位を基点とする溶接用トーチ13の先端までのトーチ長(エンドエフェクタ長)を短くする。
(もっと読む)
可動装置及び物品搬送装置
【課題】所定平面内における第1の方向の駆動用と第1の方向に対して垂直な第2の方向の駆動用とで駆動モータを別々に設ける必要がなく、且つ独立した傾動機構を設けることなく手先部分を傾動させることを可能とする。
【解決手段】可動装置(物品搬送装置10A)は、ベース部12に基端部が連結された第1リンク21、第2リンク22、及び第3リンク23と、第1リンク21、第2リンク22、及び第3リンク23の先端全てに連結された一つの出力部材24とを有し、第1リンク21、第2リンク22及び第3リンク23の駆動状態により、ベース部12に対する出力部材24の所定平面上の相対的な位置及び姿勢が定まるパラレルリンク機構20と、パラレルリンク機構20の出力部材24に取り付けられたツール40(物品把持部40A)と、を備える。
(もっと読む)
産業用ロボット及び集合処理装置
【課題】各アームを独立して動作させるとともに、各アームの上下方向の座標位置を同じにして、ワークの搬送時間等を短縮することができる産業用ロボットを提供する。
【解決手段】基台部100側からアーム部2及びハンド部3の順で連結され、そのハンド部3を所定方向に向けながら伸縮自在に動作するアーム10を2つ以上有する産業用ロボットであって、アーム10A,10Bそれぞれは、アーム伸縮軸2A,2Bを回動中心としてアーム10A,10Bを伸縮させるアーム伸縮用駆動源4A,4Bと、アーム旋回軸3A,3Bを回動中心としてアーム10A,10Bを旋回させるアーム旋回用駆動源5A,5Bと、ハンド部12の上下方向の座標位置P1,P2をほぼ同じにする連結部材13A,13Bとを備えるように構成して、上記課題を解決した。
(もっと読む)
アーム駆動装置及び産業用ロボット
【課題】アームの動作速度と動作精度を高めることができるアーム駆動装置を提供する。
【解決手段】関節部により連結された複数のアームを伸縮動作させることができるアーム駆動装置1において、基台9上の第1関節部2に回転可能に連結された第1アーム5と、第1アーム5の先端側に位置する第2関節部3に回転可能に連結された第2アーム6と、第2アーム6の先端側に位置する第3関節部4に連結された第3アーム10と、第1アーム5の第1関節部2側に設けられた第1タイミングプーリ11と、第1アーム5の第2関節部3側に設けられた第2タイミングプーリ12と、第1タイミングプーリ11と第2タイミングプーリ12との間に掛け渡され、第1アーム5が回転したときの第2アーム6の回転量を規制する第1タイミングベルト15と、第1関節部2及び第2関節部3の一方又は両方に、第1アーム5及び第2アーム6それぞれに回転力を伝達する合計2以上の駆動源7,25とを備えるように構成する。
(もっと読む)
1 - 20 / 33
[ Back to top ]