
Fターム[3C007EU17]の内容
マニピュレータ、ロボット (46,145) | 指部材の開閉機構 (890) | 駆動源に直結 (67)
Fターム[3C007EU17]に分類される特許
1 - 20 / 67
把持装置
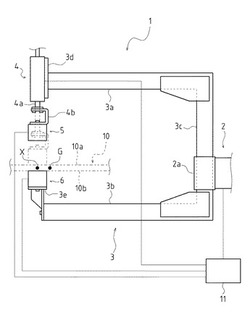
【課題】ワークの種類に応じた切り換え機構が不要である簡易な構成としながらも、大型のワークにも対応し得る把持力を確実に確保することができる把持装置を提供する。
【解決手段】ワーク10を把持するための把持装置であって、ワーク10の対応する表裏面(表面10aおよび裏面10b)に対して当接させる一対の各電磁石5・6と、各電磁石5・6を互いに押圧しあう方向に相対変位させるアクチュエータ4と、各電磁石5・6とアクチュエータ4の動作を制御する制御装置11と、を備えるとともに、制御装置11からの指令に従って、アクチュエータ4によって、各電磁石5・6を相対変位させることにより、ワーク10の重心位置Gの近傍における所定の一箇所(即ち、所定の位置X)を挟圧すると同時に、各電磁石5・6に通電することにより、ワーク10を位置Xにおいて磁着して、ワーク10を把持する。
(もっと読む)
触覚センサ、把持装置、及びアクチュエータシステム

【課題】構造が簡素な触覚センサ等を提供する。
【解決手段】触覚センサ70は、第1電極73aと第3電極73cとの間の第1静電容量と、第2電極73bと第3電極73cとの間の第2静電容量と、に基づいて、受圧部72に加わった押付力(X軸方向の力)又は押付力によって生じる把持力(Y軸方向の力)を検出する。これにより、3つの電極のみで、押付力、把持力等の力を検出することが可能になる。そのため、構造が簡素な触覚センサ70、この触覚センサ70を備えた把持装置及びアクチュエータシステムを提供することができる。
(もっと読む)
ワーク把持装置
【課題】把持部材をワークの相対個所に等しく圧接させて把持する把持態様に限定されず、各種把持態様でワークを把持する。また、一対の把持部材を個々に移動してワークを把持することができ、装置を小型化及び軽量化する。
【解決手段】互いの軸線が平行し、かつ互いの作動方向が反対になるように配置された2個のシリンダの各ピストンロッドに把持部材をそれぞれ取り付け、各シリンダの作動に伴って各把持部材を互いに近づく方向又は離間する方向へ移動してワークを把持する。各ピストンの背圧側にピストンロッドと軸線が一致し、かつシリンダ外へ突出してそれぞれ設けられたガイドロッドと、各把持部材にそれぞれ設けられ、シリンダ外へ突出した各ガイドロッドを挿通して支持する支持部材とを備える。
(もっと読む)
ロボットハンド
【課題】把持部の形状が異なる複数種類のワークを別々に把持する場合に、作動を中断することなくかつ部品を交換することなく、ワークの把持部を把持することができ、かつ把持部の形状が大きくことなっても対応でき、使用していない部分がワーク等に干渉するおそれが少ないロボットハンドを提供する。
【解決手段】把持部5aの形状が異なる複数種類のワーク5を別々に把持するロボットハンド10。長手方向に延びる1対の爪12と、爪の間隔を開位置と閉位置の間で開閉するチャック装置14とを備える。1対の爪12の少なくとも一方は、長手方向の異なる位置に、複数種類のワークA、B、Cの把持部に、それぞれ対応した形状の複数の凹溝12a、12b、12cを有する。
(もっと読む)
把持装置
【課題】対象物の内周面を利用して対象物を把持する場合に、複数の把持部で対象物を把持する前にいずれかの把持部が内周面に当たって、その結果、対象物の位置または姿勢が変化してしまうことを防止する。
【解決手段】対象物1の内周面1aを利用して対象物1を把持する把持装置10。対象物1を把持する複数の把持部3a、3b、3cと、これら把持部の動作を制御する制御装置11と、を備える。複数の把持部は、内周面1aの中に挿入された状態で、互いに離間する方向に離間駆動され、これにより、内周面1aに押し付けられることで対象物1を把持する。さらに、把持部に設けられた位置情報取得センサ11aを設ける。離間駆動の時に、位置情報取得センサ11aは、把持部と内周面1aとの位置関係を検出し、制御装置11は、該位置関係に基づいて把持部の位置を調整する。
(もっと読む)
エッジグリップ装置、及びそれを備えるロボット。
【課題】 半導体プロセス用ウエハを把持した後、素早く移動させることができるエッジグリップ装置を提供する。
【解決手段】 チャックハンド1は、半導体プロセス用ウエハ3をフロントガイド12に向かって押圧して半導体プロセス用ウエハ3を把持するプッシャー25を有する押圧機構14を備えている。押圧機構14は、プッシャー支持体22と、緩衝部材28とを更に有している。プッシャー支持体22は、進退できるよう構成され、前後にスライドできるようにプッシャー25に設けられている。プッシャー支持体22は、その前方に隙間26aがあいている。隙間26aには、反発力が小さく弾性変形可能な緩衝部材28が介在している。プッシャー支持体22は、前進すると、緩衝部材28を介してプッシャー25を押されて前方に移動させる。プッシャー25は、半導体プロセス用ウエハ3に当たって押し付けられる。
(もっと読む)
駆動装置
【課題】特性が異なる2つのアクチュエータを組み合わせたハイブリッド型の駆動装置を提供する。
【解決手段】駆動装置は、直線運動を生成するエアシリンダと、エアシリンダの駆動を制御するエアシリンダ制御部と、エアシリンダで生成される直線運動に基づいて直線動作する第1作用部と、回転運動を生成する電気モータと、電気モータに連結されたウォームとウォームにかみ合うウォームホイールからなるセルフロック機能の無いウォーム機構又はセルフロック機能の有るウォーム機構を含む変換部と、電気モータの駆動を制御する電気モータ制御部と、第1作用部に連結されるか又は係合可能であり、変換部で生成される直線運動に基づいて直線動作する第2作用部を備えており、エアシリンダ制御部はエアシリンダを駆動して第1作用部に一定の推力を加え、電気モータ制御部は電気モータを駆動し、第2作用部を介して第1作用部に、推力と第1作用部に加わる外力との合力の作用方向とは逆方向に規制力を加えながら、第1作用部の動作速度と位置を制御する。
(もっと読む)
グリッパ
【課題】 小型化を図ることが可能なグリッパを提供すること。
【解決手段】 駆動源と、上記駆動源により発生される運動を被把持物を把持する為の開閉運動に変換する把持部材と、を具備し、上記把持部材は反転にて形状安定なポジションを少なくとも2個持つものであり、それによって、簡単な構成で小型のグリッパを提供することができ、又、ギヤやカム等を使用した構成ではないので、摩擦もなく摩擦ロスによる機械効率低下も少ない。又、把持部材は少なくも2つの安定な形状を保持しているので、切り換えるときのみ通電すればよく、駆動源に対する通電時間を短くすることができる。
(もっと読む)
搬送動作ティーチング方法
【課題】実物のワークが無くても、搬送装置に対してティーチングを行うことができ、多種類のワークを対象とする場合でも簡便にティーチングを行うことができ、ワークの把持位置を正確にティーチングすることができ、把持機構の部品を交換した場合の再ティーチングを簡単に行うことができる搬送動作ティーチング方法を提供する。
【解決手段】搬送動作ティーチング方法は、ワーク12を載置するためのパレット14上にある任意の箇所(基準部52)を、ワーク12を搬送する軌跡の基準点として設定する基準点設定工程と、予め、搬送装置10を動作させるための動作情報であって、基準点を原点とした座標系にて、基準点を基準に所定の軌跡に沿ってワーク12を搬送する動作を指示する動作情報を作成する動作情報作成工程と、動作情報に従って動作する搬送装置10に、実際のパレット14上にある基準点をティーチングするティーチング工程とを有する。
(もっと読む)
ロボットハンド
【課題】種々の対象物を容易に取り扱うことができるロボットハンドを提供する。
【解決手段】可動部2を移動させて可動部2の物体接触面Pを対象物に接触させ、スライドアクチュエータ13を作動させてピストン11をシリンダ9内に所定量だけ押し込み、シリンダ9内に貯留されていた水を供給管10を介して液体供給口8から物体接触面P上に供給する。これにより、水の表面張力に起因して物体接触面Pの摩擦係数が変化し、種々の対象物を取り扱うことが可能となる。物体接触面Pの摩擦係数を元に戻す場合には、可動部2の物体接触面Pに超音波振動を発生させ、この超音波振動によって物体接触面Pに残った水分を霧化蒸発させる。
(もっと読む)
流体圧駆動装置及びそれを用いた屈伸機構
【課題】ピストンの摺動抵抗を増加させることなく軽量且つ小型に構成することができ、構造簡単として高精度な屈伸動作が可能となる流体圧駆動装置及び流体圧駆動装置を用いた屈伸機構を提供する。
【解決手段】シリンダ本体101の内面に摺接するピストン102と、ピストン102に連結されたピストンロッド103とを設ける。ピストンロッド103を金属により形成し、ピストン102を合成樹脂により形成する。ピストンロッド103は、その球部108をピストンの球面受け部106に嵌合することによりピストン102に連結する。ピストン102の外周面に、その周方向に延びる凹部107を形成する。
(もっと読む)
5指型ハンド装置
【課題】人間の手と同様の動作と十分な把持力を得ながら小型軽量化を可能として、ヒューマノイドロボットに好適に採用できる5指型ハンド装置を提供する。
【解決手段】基部4と5つの機構5〜9とを備えるハンド本体2を設け、指機構を駆動する駆動手段3を設ける。駆動手段3は、ハンド本体2内で指機構を作動させる従動流体圧シリンダと、ハンド本体2の外部にあって従動流体圧シリンダに流体圧伝達管45を介して接続された駆動流体圧シリンダ37と、駆動流体圧シリンダ37から従動流体圧シリンダに伝達される作動用流体圧を調節して指機構の屈伸を制御する制御手段36とを備える。
(もっと読む)
5指型ハンド装置
【課題】人間の手と同様の動作を実現し且つ小型軽量化を可能とすることにより、ヒューマノイドロボットに好適に採用できる5指型ハンド装置を提供する。
【解決手段】示指機構6と中指機構7との何れか一方又は両方及び拇指機構5に、指先部に作用する力を検出する力センサ21を設ける。力センサ21を備える指機構を、指先でのつまみ動作を含む器用動作を行う器用指とする。器用指以外の指機構は、器用指の動作に応じて握り動作を含む力動作を行う力指とする。
(もっと読む)
把持装置
【課題】溝形部材の把持後に溝形部材の姿勢調整を必要としない把持装置を提供することを課題とする。
【解決手段】把持装置40は、ロアサッシュ12の底壁71に当接する第1当接部43と、連結部材18の下面73に当接する第2当接部45と、第1電動モータ46で回転させられることでロアサッシュ12の側壁72の凸部15に係合する第1凹部49及び側壁75の凸部16に係合する第1凹部48が設けられている第1係合部51と、第2電動モータ52で回転させられることで凸部15、16に係合する2つの第2凹部が設けられている第2係合部56とを備えている。
【効果】把持装置40に対するロアサッシュ12の位置決め精度が向上するので、把持装置40に対するロアサッシュ12の姿勢調整が不要になる。したがって、ロアサッシュ12の把持後にロアサッシュ12の姿勢調整を必要としない把持装置40を提供することができる。
(もっと読む)
微小マニピュレータ装置
【課題】FIB装置に組み込んだ微小マニピュレータ部をその場でエッチング加工することで、従来困難であった1μm以下の微小物のハンドリングの確実性を高めるとともに、マニピュレータの再利用により作業効率やメンテナンス性を向上する。
【解決手段】微小マニピュレータ部を位置および向きを変えることのできる移動機構で保持することにより、マニピュレーション作業前にマニピュレータ先端部をFIB加工するとともに、作業中のマニピュレータ先端の汚染や破損があった場合でも、加工により再度使用可能な形状に再生する。
(もっと読む)
試料位置検知端部エフェクタおよびその使用方法
【課題】ウエハの引っ掻き傷や粒子による汚損を最少にして半導体ウエハを確実に移送し得る試料把持用端部エフェクタを提供すること。
【解決手段】光源、及び受光部に作動するように連結された本体を有する端部エフェクタを設け、前記光源、及び受光部は離間するそれぞれの光源光路開口、及び受光路開口を有し、これ等開口の間に光透過路に沿って光ビームが伝搬し、これ等光ビームが既知のビーム形状であるように前記光源光路開口、及び受光路開口の寸法を定め、前記試料と本体との空間を狭くするため、これ等試料と本体との間の相対運動を与え、前記相対運動を与えることに組み合わせて、前記光透過路に交差するように前記試料を位置決めする。
(もっと読む)
物品保持装置
【課題】物品に位置ズレが生じていても、物品を適切に保持できる物品保持装置を提供する。
【解決手段】物品保持装置13は、物品2の側面部3,4,5に対して進退可能でそれぞれが異なる側面部3,4,5に引っ掛かるフック体21,41,51を備える。各フック体21,41,51には、対応する側面部3,4,5を検知する検知手段42,52を取り付ける。対応するフック体21,41,51を進退させる駆動手段23を各フック体21,41,51に対応して設ける。物品保持装置13は、検知手段42,52の検知に基づいて駆動手段23を制御して各フック体21,41,51の進出動作を個別に停止させる制御手段61を備える。
(もっと読む)
移載ロボット
【課題】ワークを確実にストレージ体に保持させることができ、またストレージ体からワークをマテハン部で確実に把持して移載することことができる移載ロボットを提供すること。
【解決手段】ストレージ体2(3)から別のストレージ体3(2)へワーク100を移載するために用いられる移載ロボット1である。移載ロボット1は、ワーク100を把持するマテハン部5と、これをを移動させるためのアーム15とを備える。マテハン部5は、ワーク100を把持するクランプ部51、52と、ワーク100を把持した状態でマテハン部5に付与される鉛直方向の荷重を検出して検出信号Pを送信する第1ロードセルと、マテハン部5に付与される水平方向の荷重を検出して検出信号Qを送信する第2ロードセルとを有する。移載ロボット1は、検出信号P及び/又は検出信号Qに基づいて、マテハン部5の作動を制御するように構成されている。
(もっと読む)
半導体ウエーハ搬送用ハンド
【課題】ウエーハのノッチの位置合せを実行することができ、かつ、径の異なるウエーハを搬送した場合でも、ウエーハ処理装置に対するウエーハの中心位置を位置合せすることができる半導体ウエーハ搬送用ハンドを提供する。
【解決手段】容器からウエーハWを取り出し、ウエーハWを処理する処理装置に搬送する半導体ウエーハ搬送用ハンド10であって、ハンド部材本体12と、ハンド部材本体12に対して移動可能なハンド部材14と、ハンド部材14に対して移動可能な保持部材36と、ウエーハWと接触する第1回転部材24と、第1回転部材24と共にウエーハWを回転させる第2回転部材56と、第1回転部材24と第2回転部材56が相互に離間する方向又は相互に接近する方向に沿って同じ距離だけ移動させる移動手段と、ウエーハWのノッチを検出するノッチ検出手段と、を有する構成とした。
(もっと読む)
作業機械の把持装置及びこれを備えた作業機械
【課題】大きな把持力による処理対象物の把持と、微細な把持力の調整との双方が可能な作業機械の把持装置およびこれを備えた作業機械を提供する。
【解決手段】把持装置20は、一対の把持部材30A,30Bを有する。その少なくとも一方は、把持部材本体32と、可動把持部34と、ばね部材36とを含む。可動把持部34は、処理対象物Pから受ける反力によって把持部材本体32に対しその回動の向きと逆の向きに相対的に所定量だけ後退変位することが可能となるように把持部材本体32に取付けられる。ばね部材36は、可動把持部34を内向きに付勢するためのもので、その弾性変形によって可動把持部34の後退変位を許容し、かつ、その弾発力により、処理対象物Pに対する可動把持部34の接触圧を増加させる。
(もっと読む)
1 - 20 / 67
[ Back to top ]