
Fターム[3C007EV28]の内容
マニピュレータ、ロボット (46,145) | 挟持装置の当接部 (909) | 付加機能を有するもの (310) | 物品と当接面を相対的に直線運動させるもの (14)
Fターム[3C007EV28]に分類される特許
1 - 14 / 14
寸法測定装置および寸法測定装置を備えた荷搬送ロボット
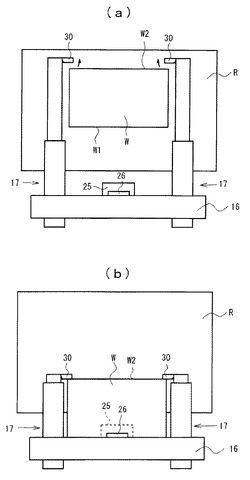
【目的】寸法測定装置および荷搬送ロボットの提供。
【解決手段】荷搬送ロボットの本体16には、エリアセンサ26と左右一対のアーム17を設け、アーム17の先端付近には対向する内側に向けて突設された手先部30が傾動可能に設けられる。手先部30を荷の基端面W1の左右端面に当接可能な位置でアーム17を伸縮させることで、荷Wの側面に当接し傾動した状態の手先部30は荷の遠端面W2において傾動状態から復帰し、そのときのアーム17の伸長量から遠端面W2の位置を算出する。荷Wの奥行寸法は、エリアセンサ26により測定した本体16からの基端面W1の位置と、手先部30が傾動復帰したときの遠端面W2の位置から演算する。
(もっと読む)
把持装置、ロボットシステム及び把持方法

【課題】把持対象物を把持する際に把持対象物を高精度に位置決めすること。
【解決手段】多指ハンド3は、掌部12と関節17,18を有する複数の指部13とを備え、掌部12及び複数の指部13で工具7を把持する。掌部12は、工具7の把持対象物側接触面25に接触させる掌部側接触面12aを有している。掌部側接触面12aには、把持対象物側接触面25に設けられた突起部26,27が挿入される穴部19,20が設けられている。そして、穴部19,20に突起部26,27が挿入されることにより、掌部側接触面12aの接線方向Tに対する工具7の位置決め及び掌部側接触面12aの法線nを回転軸心とした回転方向Rに対する工具7の位置決めがなされる。
(もっと読む)
ロボットハンド及びそれを用いたパレタイジング装置
【課題】粒状物を充填した不定形袋のパレタイジングにおいて、高い積載効率を確保するとともに荷崩れを起こしにくい積付け山を形成できるようにする。
【解決手段】パレタイジング装置のロボットアーム先端側に取り付けられて不定形袋50をワーク支持手段12で支持しながら積載スペース内に積付けてパレタイジングを行うロボットハンド10であって、そのワーク支持手段12は横向きにした不定形袋50を下から支えて持ち上げるための複数本のフォーク12a,12b,12c,12dをロボットハンド前面下端側から前方に突出した状態で横方向に並列して有しており、両端のフォーク12a,12dの間で少なくとも1本以上のフォーク12b,12cが上面を両端のフォーク12a,12d上面よりも高い位置で設けられて正面視山形のフォーク配置とされており、不定形袋50を中央部が弧状に持ち上がった状態で支持しながら積付けを行うものとした。
(もっと読む)
圧縮ばねハンドリング装置
【課題】
サイズが異なる複数の圧縮ばねを取り扱う事が可能な圧縮ばねハンドリング装置を提供すること。
【解決手段】
本発明に係る圧縮ばねハンドリング装置は、圧縮ばねを圧縮方向に挟持する開閉自在な対となった挟持爪を有する挟持爪ユニットと、前記挟持爪それぞれに対応して設けられ、前記挟持爪と一緒に移動すると共に圧縮ばねを挟持した状態において挟持爪と当接している圧縮ばねの端部を押し、挟持された圧縮ばねを前記挟持爪ユニットから押し出すプッシャーと、各前記プッシャーを押出方向に同期駆動する押出駆動部と、から構成されている。
(もっと読む)
搬送装置、搬送方法、露光装置、及びデバイス製造方法
【課題】載置ずれや変形を生じさせることなく、基板保持部に基板を受け渡すこと。
【解決手段】基板Pを保持する基板保持部としてのプレートホルダ9に基板Pを搬送する搬送装置は、基板Pを支持する支持装置としての搬送ハンド12と、搬送ハンド12を駆動し、プレートホルダ9からの搬送ハンド12の一部の高さと他部の高さとを相対的に変化させ、かつその一部の高さ及び他部の高さを減少させて、搬送ハンド12が支持する基板Pをプレートホルダ9に受け渡す駆動装置13,14と、を備える。
(もっと読む)
ロボットハンドシステム
【課題】ロボットの手先に取り付けられるOリング装着ハンドを含むロボットハンドシステムを得る。
【解決手段】ロボットハンドシステムは、環状の先端部を持つ外筒と、外筒内でばね偏倚されて、先端部にOリングを保持し得て、外筒の先端部に対して軸方向に摺動可能な円筒部を持ち、この円筒部が外筒の先端部から突出した突出位置と先端部内に後退した後退位置との間で摺動できる内筒とを備えている。Oリング供給ジグも共に使用できる。
【効果】駆動のための動力が不要である。
(もっと読む)
弦楽器演奏用のロボットハンドおよび弦楽器演奏用のロボット
【課題】大出力のアクチュエータを用いることなく、大きなビブラートストローク量を確保することが可能な弦楽器演奏用のロボットハンドを提供すること。
【解決手段】指部本体と、該指部本体に取り付けられ、弦を押さえるための接触子を先端に有した揺動リンク機構と、を備える指部を含む、弦楽器演奏用のロボットハンドにおいて、接触子を弦に押し付けるように指部本体を移動させた際に、揺動リンクが弦に対して相対的に位置を変化しながら揺動するように指部を構成するとともに、揺動リンクの揺動を妨げる向きに力を付与する力付与手段が設けられており、接触子が弦と接触を保った状態で、接触子を弦に押し付ける方向に指部本体を移動させることで、揺動リンクが揺動し、接触子が弦を押さえたまま弦の長手方向に移動可能となるように構成した。
(もっと読む)
把持装置及び積込装置
【課題】各寸胴型の把持対象物間の間隔を空けることなく箱詰めするのに適した把持装置を提供する。
【解決手段】把持装置は、開放状態において、ベースプレートの連通孔からシリンダ内にエアが送られると、ピストンが下降し、当該ピストンの下降に伴って、本体部の4隅相当部位に上下摺動自在に立設された各プッシュロッドも下降する。各プッシュロッドが下降すると、プッシュロッドのそれぞれの移動に伴う楔作用により、各係合部材はそれぞれの一部分が本体部の内方の空間に向かって突出するので、各係合部材の一部分が寸胴型のボトルのくびれ部に押し付けられて係合し、当該係合により、把持装置は、寸胴型のボトルを把持することができる把持状態を形成する。把持状態においてシリンダ内のエア圧を開放すると、ピストン及び各プッシュロッドが上昇し、把持装置は開放状態となる。
(もっと読む)
試料ホルダを回転及び並進させるマニピュレータ
【課題】 本発明は、従来技術に係るマニピュレータを代替するマニピュレータを供することを目的とする。
【解決手段】 たとえば透過型電子顕微鏡(TEM)に用いられるマニピュレータが記載されている。当該マニピュレータは、試料ホルダ(4)を回転及び並進させる能力を有する。当該マニピュレータは、円形の試料ホルダを2の部材(3A,3B)間で留める。前記部材はアクチュエータ(2A,2B)上にマウントされている。複数のアクチュエータを同一の方向に動かす結果、試料ホルダは並進する。その一方で、複数のアクチュエータを反対方向に動かす結果、試料ホルダは回転する。
(もっと読む)
把持装置、及び、ハニカム構造体の製造方法
【課題】 ハニカム構造体を適切な姿勢で把持し、所定の位置に簡便に搬送して載置することができる把持装置を提供すること。
【解決手段】 本発明の把持装置は、回転軸が平行となる少なくとも2個の支持ローラを有する第一の把持部と、上記第一の把持部の支持ローラに対向する少なくとも1個の支持ローラを有する第二の把持部と、上記第一の把持部及び上記第二の把持部を有する少なくとも1つの把持機構とを備え、上記第一の把持部の支持ローラの回転軸と上記第二の把持部の支持ローラの回転軸とは平行になっており、上記第一の把持部及び上記第二の把持部の少なくとも一方を移動させることにより、上記支持ローラを介して上記第一の把持部と上記第二の把持部との間に被把持物を把持することを特徴とする。
(もっと読む)
ワーク位置決定装置およびワーク位置決定方法
【課題】 簡単な構造の装置で、パネル状のワークについて2方向の位置決めをすること。
【解決手段】
ワーク位置決定装置100は、ワークWを載せる複数のアーム1と、複数のアーム1に設けられた位置決定ストッパと、位置決定部材3と、を備え、複数のアーム1を2方向に傾動させ、ワークWを位置決定ストッパおよび位置決定部材3に当接させることで、ワークWの2方向の位置を決定する。
(もっと読む)
アクチュエータ及びロボットハンド
【課題】進行波により対象物を搬送する上で、十分な搬送性能を実現することができ、構造が簡単であり、かつ小型化に適したアクチュエータを提供する。
【解決手段】アクチュエータ基板11上にフレキシブル基板14を重ね合わせて固定し、フレキシブル基板14上に複数の伸縮駆動素子12を並設して固定し、各伸縮駆動素子12の上端にシート状の弾性部材13を載せて係止し、制御駆動部15をフレキシブル基板14を通じて各伸縮駆動素子12に接続している。制御駆動部15は、フレキシブル基板14を通じて各伸縮駆動素子12に電圧を順次印加し、各伸縮駆動素子12をZ方向に順次伸縮させて、弾性部材13を変形させて波打たせ、弾性部材13に進行方向がX方向の進行波を形成する。この弾性部材13に対象物を載置すると、この弾性部材13の進行波により対象物がX方向とは逆方向に搬送される。
(もっと読む)
ロボットハンド
【課題】実現性が高く、対象物のより複雑な扱いが可能なロボットハンドを提供する。
【解決手段】ロボットハンド10の手の平に移送機構61を設けているので、ロボットハンド10により対象物Pを把持した際に、移送機構61により対象物Pを矢印Gの方向又は逆方向に移送することができる。このため、移送機構61を有しないロボットハンドと比較すると、対象物Pのより複雑な扱いが可能になる。また、ベルトコンベアの移送機構61を付設するだけであるから、実現性が極めて高く、その制御も容易である。
(もっと読む)
把持装置
【課題】 被把持体を把持する際に被把持体と把持手段との間に姿勢のずれがあった場合に、被把持体の姿勢ずれを吸収して強固に把持することができる把持装置を提供すること。
【解決手段】 互いに近接・離隔するとともに開閉して被把持体26を把持するハンド部材24、25と、ハンド部材24、25を搬送させるアーム部材21とを設け、ハンド部材24、25の先端部を摩擦係数が小さい部材27a、27bから構成し、ハンド部材24、25の先端部を除いた領域を、ハンド部材24、25の先端部よりも摩擦係数が大きい部材28a、28bから構成する。
(もっと読む)
1 - 14 / 14
[ Back to top ]