
Fターム[3C007KS00]の内容
マニピュレータ、ロボット (46,145) | 検出の対象 (5,001)
Fターム[3C007KS00]の下位に属するFターム
作業対象物の状態 (971)
作業環境(例;雰囲気温度) (665)
マニピュレータの状態 (1,659)
接触 (238)
すべり (31)
力 (648)
距離、接近 (394)
電圧、電流 (87)
時間 (35)
音声 (227)
外乱 (14)
Fターム[3C007KS00]に分類される特許
21 - 32 / 32
コミュニケーションロボット
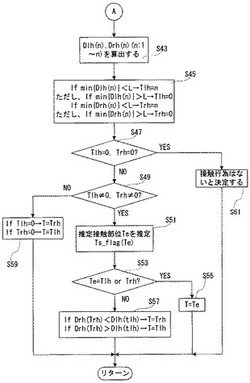
【課題】より生物らしい反応行動を実行するロボットを提供する。
【解決手段】ロボットとそのロボットおよび協働する人間の各部位の3次元位置座標に基づいて、人間が一定距離以内にロボットに接近しているかどうか判断したとき、ステップS45で、人間の手とロボットの各タッチセンサとの間の距離Dlh(n),Drh(n)を検出し、その距離が所定の接近距離L以内でかつ最も小さいロボットの部位(タッチセンサ)Tlh,Trhを検出する。Tlh,Trhが両方とも「0」でないときには、CPUは、人間の視線方向に基づいて推定接触部位Teを特定または推定する。ただし、視線方向と推定接触部位とが一致しないときには、距離Dlh(n)およびDrh(n)の小さい方を推定接触部位Teとして特定する。
(もっと読む)
多関節型ロボット

【課題】 ある教示位置と次の教示位置との間が離れている場合であっても、大きな曲線の移動軌跡を描かずに動作する多関節型ロボットを提供する。
【解決手段】 出力側端部32の位置を、直交座標系による座標で算出する位置算出手段99と、教示動作時に出力側端部32の教示位置の直交座標系での座標を記憶する第1の記憶手段69と、各教示位置間の距離を所定間隔毎に分割し、該分割した各分割点の位置を、直交座標系による座標で算出する分割位置算出手段73と、分割位置算出手段73によって算出された分割点の座標を記憶しておく第2の記憶手段69と、出力側端部32を移動させる際に、教示位置と教示位置との間は、分割位置算出手段73によって算出された分割点を出力側端部32が経由して移動させるように制御する移動制御手段74とを具備する。
(もっと読む)
ロボット制御システムおよびロボットの制御方法
センサユニット(10)のCPU(22)は、ロボット動作中においてセンサ(15)のセンサ出力を制御周期内の送信周期においてロボットCPU(12)に送信する。制御周期の残りの受信周期においてロボットCPU(12)は更新パラメータをCPU(22)に送信する。CPU(22)は更新パラメータを受信し、RAM(16)の記憶領域のうちデフォルトのパラメータが記憶されている第1領域と異なる第2領域に書き込む。CPU(22)は、さらにロボットCPU(12)から更新コマンドを受信すると、パラメータをデフォルトから第2領域に記憶された更新パラメータに切り替えて処理を実行する。  (もっと読む)
(もっと読む)
救命支援ロボットシステム
【課題】医療遠方地域においても医療可能センタからの医療行為が可能であると共に患者を医療側に迅速に運ぶことができる救命支援ロボットシステムを提供することを目的とする。
【解決手段】ロボット遠隔制御装置1と、ロボット遠隔制御装置と基地局28a、28bを介して通信を行うロボット装置2とを有し、ロボット遠隔制御装置は制御データに基いてロボット装置を制御する救命支援ロボットシステムであって、ロボット装置は、生体情報を得る生体情報センサ25〜27を有し、ロボット遠隔制御装置は、生体情報を移動体通信により取得して解析する。これにより、医療遠方地域においても医療可能センタからの医療行為が可能である救命支援ロボットシステムが得られる。
(もっと読む)
物品管理システム、物品管理サーバ、物品モジュール、およびロボット
【課題】 リアル空間にある物品を、バーチャル空間で移動、処分、管理することのできる物品管理システムを提供する。
【解決手段】 物品管理システム(1)は、リアル空間に存在する各物品の情報を、前記各物品の場所的所属関係に基づく階層構造に基づいてバーチャル空間で管理する物品管理サーバ(10)と、前記各物品に付される物品モジュール(30)と、前記バーチャル空間における前記物品の処理、移動に応じて、前記物品管理サーバおよび前記物品モジュールとの間の通信により、リアル空間での物の移動、処理を実行するロボット(20)とを含む。物品モジュールは、物品管理サーバまたはロボットから受信するID送信開始命令に基づいて、ID信号の送信を開始する。ロボットは、ID信号の強度に基づいて、物品の位置を探索する。
(もっと読む)
ロボット制御装置およびロボットの位置決め精度補正方法
【課題】 ロボットの位置決め精度の温度補償をする際、システムに別途温度センサを付加することなく位置決め精度を向上させる。
【解決手段】 エンコーダ15に内蔵された温度センサ17の検出温度を利用し、エンコーダ15の温度と位置決め精度の関係により求められる位置補正量によって、温度補償する。
(もっと読む)
コミュニケーションロボット
【構成】 コミュニケーションロボット10は赤外線照射装置100および赤外反射光計測用カメラ102を用いて、コミュニケーション相手である人間の視線を検出する。ロボット10は検出結果により人間の視線がロボット10の方を向いていないと判断すれば、人間の視線をロボット10の方に向けさせる行動を取る。
【効果】 ロボット10は人間の視線に応じた自然な働きかけを人間にすることができる。
(もっと読む)
コミュニケーションロボット
【構成】 サーバ100はコミュニケーションロボット12の位置を赤外線カメラシステム112から入力される座標データから検出し、その位置を中心とした一定範囲内にある騒音計114で騒音レベルを測定する。そして、ロボット12はその騒音レベルから周囲の混雑度を把握して、ロボット12の移動方向や移動距離などを求め、ロボット12は移動する。
【効果】 ロボット12に個性を持たせる、あるいは周囲の混雑度に応じた行動を人間に対して実行させることができる。
(もっと読む)
コミュニケーションロボットシステムおよびコミュニケーションロボット
【構成】 サーバ100はコミュニケーションロボット12の位置を赤外線カメラシステム112から入力される座標データから検出し、その位置を中心とした一定範囲内にある騒音計114で騒音レベルを測定する。そして、その騒音レベルからロボット12の周囲の騒音レベルを取得して、騒音レベルに基づきロボット12の周囲の混雑度を調べ、ロボット12に混雑度を送信する。ロボット12はこれを受けて、周囲の混雑度に応じたコミュニケーション行動を取る。
【効果】 ロボット12は周囲の混雑度に適した行動により人間に働きかけることができる。
(もっと読む)
人工皮膚
【課題】 全体として柔軟な特性を実現しつつ、近接する多数点において、温度,圧力,接触を検出することが出来る、新規な構造の人工皮膚を提供することを目的とする。
【解決手段】 硬質部分20と軟質部分22が設けられた弾性シート12と、弾性シート12における硬質部分20の表面に及ぼされる圧力を検出する圧力検出手段46と、他物との接触を検出する接触検出手段30と、温度を検出する温度検出手段40とを、含んで人工皮膚を構成した。
(もっと読む)
人間型ロボットの冷却構造
【課題】 電力消費の削減や冷却性能の向上、騒音の低減等を図った人間型ロボットの冷却構造を提供する。
【解決手段】 電装品ボックス6には、左側面に第1電装品ボックス側排気口45と第2電装品ボックス側排気口46とが前後にならんで形成され、右側面に第1電装品ボックス側吸気口47と第2電装品ボックス側吸気口48とが前後にならんで形成されている。両排気口45,46と両吸気口47,48は、ともに斜め後方に開口する5条のスリットからなっている。両排気口45,46は、その内側にプロペラ式の電装品ボックス側排気ファン49を備えている。
(もっと読む)
レーザを利用したプラント内の点検・補修方法およびそれを行うロボット
【課題】 機器や配管から漏洩するガスが微少であってもそのガスが漏洩する箇所を特定することができ、さらに、ガスの漏洩箇所の補修を行うことができるレーザを利用したプラント内の点検・補修を行うロボットを提供することにある。
【解決手段】 前進及び後進並びに旋回を行う車輪6を複数備えた台車7と、台車7に搭載され、レーザを照射することにより機器や配管からもガスの漏れを検知するレーザ装置8と、台車7内に搭載され、レーザ装置8により検知されたガスの漏れの濃度分布を計測する濃度分布計測装置と、台車7内に搭載され、前記濃度分布計測装置によりガスの濃度が最も高い箇所を損傷箇所と特定する損傷箇所特定装置とを有し、レーザ装置8には、前記損傷箇所特定装置により特定された損傷箇所に上記レーザと異なるレーザを照射して補修する機能をさらに備えたことで、機器や配管から微少のガスが漏洩してもそのガスの漏洩箇所を特定することができ、さらに、ガスの漏洩箇所の補修を行うことができるようにした。
(もっと読む)
21 - 32 / 32
[ Back to top ]