
Fターム[3C007LT18]の内容
マニピュレータ、ロボット (46,145) | 位置制御 (995) | 作業開始点への位置決め(再開点も含む) (23)
Fターム[3C007LT18]に分類される特許
1 - 20 / 23
ロボット制御装置、ロボットシステム、及びロボット制御方法
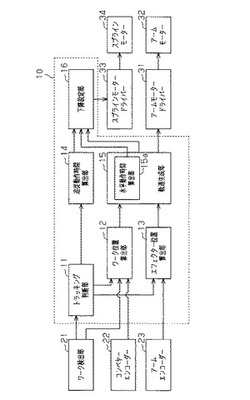
【課題】ロボットに取り付けられたエンドエフェクターとコンベヤー上のワークとの衝突を抑制することのできるロボット制御装置、該装置を備えるロボットシステム、及びロボット制御方法を提供する。
【解決手段】ロボットコントローラー10は、エンドエフェクターがワークの上方に移動する際に、該ワークの位置の上方にエンドエフェクターが到達するために必要な水平動作時間を算出する水平動作時間算出部15aと、エンドエフェクターの速度とワークの速度とが同調するために必要な追従動作時間とを算出する追従動作時間算出部14と、エンドエフェクターがワークの上方に到達する前に、水平動作時間と追従動作時間とを比較してエンドエフェクターの下降の終了時を設定する下降設定部16とを有する。下降設定部16は、水平動作時間が追従動作時間よりも短い場合、エンドエフェクターの移動の開始時から追従動作時間の経過時以降を下降の終了時とする。
(もっと読む)
ロボット搬送装置

【課題】搬送動作途中の停止位置から、ロボットが干渉することなく、動作開始位置へ戻ることが簡単にできるロボット搬送装置を提供する。
【解決手段】ロボット50とロボット制御装置100と搬出プログラム24aとプログラム実行手段と前進方向又は後退方向を設定する実行方向設定手段とワークの搬送状態検出手段とからなるロボット搬送装置1において、搬出プログラム24aの実行による搬送動作が停止され、停止位置からの復帰動作は、ワークの搬送状態検出手段により、搬送状態を取得し、非搬送中ならば、搬出プログラム24aの停止ステップから先頭ステップまで、後退方向に実行して搬出動作の始点に移動し、搬送中ならば、搬出プログラム24aの停止ステップから末尾ステップまで、前進方向に実行して搬送動作の終点に移動する。
(もっと読む)
探索装置、自動組付け装置、探索方法、およびプログラム
【課題】部品のワークへの組付け位置を精度よく探索できる探索装置を提供する。
【解決手段】ワークは、バカ穴とバカ穴の底面に形成されたネジ穴とを有する。探索装置は、ネジと底面とを接触させた状態で、u軸方向の正および負の向きと、v軸方向の正および負の向きとに、ネジを移動させる。探索装置は、u軸方向の正および負の向きと、v軸方向の正および負の向きとに、ネジを各々移動させたときに反力が閾値Th1以上となる位置Pα,Pβ,Pγ,Pδを特定する。探索装置は、位置Pαと位置Pβとの間の距離が閾値Th2未満の場合には、位置Pαと位置Pβとの中間位置を起点としたv軸方向への移動と、位置Pγおよび位置Pδの特定とを実行する。探索装置は、位置Pγと位置Pδとの間の距離が閾値Th2未満の場合には、位置Pγと位置Pδとの中間位置をネジの組付け位置と判断する。
(もっと読む)
ロボットを使用した、航空機構造のための自動位置付け及びアライメント方法及び装置
【課題】航空機胴体及びその他の部品を位置付けるための、より自動化された、かつ、非常に正確な自動位置付け及びアライメント方法及びシステムを提供する。
【解決手段】6自由度を有する擬人化ロボット100を使用して、位置付け及びアライメントの間、航空機構造部品FP1を運ぶ。部品、及び部品を支持する構造(存在する場合)は、ロボットツールとして扱われる。
(もっと読む)
ワーク把持ハンドの作動制御方法
【課題】一対の把持指が互いに接近する閉動作と互いに離間する開動作を繰り返し行うワーク把持ハンドにおいて、特定の歯に対して駆動負荷が集中することにより発生する偏摩耗を抑制することができる、ワーク把持ハンドの作動制御方法を提供する。
【解決手段】ピニオンギア8を間に挟んで相対する一対のラックギア5a、5bには、それぞれ把持指7a、7bが一体的に設けられている。ピニオンギアをモータにより正・逆回転させて一対の把持指7a、7bを互いに接近又は離間させることにより、ワークの把持および離脱動作を繰り返し行う。把持および離脱動作の繰り返しごとに一対の把持指7a、7bの待機位置を変化させることによって、ラックギア5a、5bのピニオンギア8との歯のかみ合い位置を変化させて、駆動負荷が集中するのを抑制する。
(もっと読む)
基板搬送用ロボット及びそれを備えた基板搬送装置、半導体製造装置
【課題】基板搬送用ロボットにおいて、基板を目的位置へ搬送する場合の搬送経路の選択肢を増やし、これにより搬送時間の最短経路を選択することを可能にさせる。
【解決手段】基板搬送用ロボットのコントローラが、複数の教示位置が教示された際、教示位置の各々に対するアクセス待機位置11を生成し、アクセス待機位置11から基板搬送用ロボットの最小旋回姿勢12までの複数の経路を生成して記憶する。
(もっと読む)
ロボットシステム、ロボットシステムの制御装置および制御方法
【課題】教示作業を精度よく且つ効率よく行うことができるロボットシステム、ロボットシステムの制御装置および制御方法を提供する。
【解決手段】ロボットシステムにおいて、視覚センサは、ロボットの制御点と共に移動し、ロボットの作業対象であるワークの画像情報を取得する。記憶部は、ロボットの制御点と視覚センサの視野内の特定位置との位置関係を示す位置関係データRを格納する。制御部は、ロボットの制御点の現在位置Pを検出する。制御部は、検出された制御点の現在位置Pをワークの特徴点の位置とみなして上記の位置関係データRに基づいて、特徴点が視覚センサの視野内の特定位置に位置するようなロボットの制御点の目標位置PPを演算する。そして、制御部は、ロボットの制御点が目標位置PPに移動するようにロボットを制御する。
(もっと読む)
ロボットシステムおよび制御方法
【課題】多関節ロボットが障害物等に衝突した際、ロボット及び障害物に与える機械的ダメージを最小限に抑えるロボットの停止方法を提供し、衝突検出後、再プレイバックした際、再衝突を回避できるようにする。
【解決手段】モータ3により駆動されるロボットアーム4と、前記ロボットアーム4が障害物に衝突することを検知する衝突検出装置6を備え、前記衝突検出装置6からの情報をもとに前記ロボットアーム4を制御するロボットシステムにおいて、前記衝突検出装置6からの前記情報をもとに複数の停止方法を判断する停止方法選択処理部15を備えたものである。
(もっと読む)
ロボットの原点復帰装置
【課題】ワークの形状を入力せずとも、動作点以外の位置で停止したロボットアームをワークとの衝突を回避しながら原点位置に戻す。
【解決手段】各動作点について、停止位置からワークの中心位置のベクトルと停止位置から動作点までのベクトルの内積を演算し、内積値が0未満のとき、その動作点を移動目標点に設定する。また、上記2つのベクトルの内積が0以上のとき、停止位置に最も近い動作点を移動目標点に設定する。そして、停止位置から移動目標点にロボットアームを移動させた後、動作点を順に辿って原点位置に復帰させる、
(もっと読む)
ロボット制御装置
【課題】位置ずれ検出動作において接触検出後のロボット停止動作を滑らかにする。
【解決手段】ロボットRに取り付けられた作業ツールTによってワークWの位置ずれを検出するための指令位置を算出する指令位置生成部2と、指令位置に基づいて作業ツールTを移動させる駆動制御部3と、作業ツールTがワークWへ接触したことを検出して停止信号Tsを出力する停止処理部8と、作業ツールTがワークWへ接触したときの接触位置Dvを記憶する接触位置算出部7と、位置ずれ量を算出して教示データTdを補正する位置補正部9と、を備える。停止信号Tsの入力により、駆動制御部3が認識している作業ツールTの現在位置を接触位置Dv、指令位置生成部2が出力している指令位置を惰走位置Svとして作業ツールTを惰走位置Svから接触位置Dvへ逆送させる惰走距離補正経路を算出し、本来の接触位置Dvで停止する。
(もっと読む)
移動ロボットの本体位置決め方法
【課題】移動ロボットが搭載マニピュレータで作業を行う際に、複雑な多関節型の搭載マニピュレータにおいても、簡単な処理により、最適な位置・姿勢でハンドリング作業を行うことができる移動ロボットの位置決め方法を提供する。
【解決手段】マニピュレータの可動範囲を示す立体を水平に切断した複数の水平面内におけるマニピュレータの操作性の評価値の分布データを持ち、移動ロボットが作業を行う際には、マニピュレータの操作性の評価値の分布データから求めたマニピュレータの操作性が良好な点と、移動ロボットの作業点が一致するように移動ロボットのロボット本体の位置決めを行う。
(もっと読む)
ロボットシステム
【課題】セル生産方式の製品生産に適用可能なロボットシステムを提供する。
【解決手段】物を掴むための手ユニット123cを有するロボット120と、ロボット120の操作者11の動作を検出する検出部110と、ロボット120の動作を制御するロボット制御部130とを備え、検出部110は、操作者11の手に取り付けられ、該操作者11の手にかかる圧力を検出する第1圧力検出部111を有し、ロボット制御部130は、第1圧力検出部111により検出される圧力と同じ圧力が手ユニット123cにかかる状態で、ロボット120が検出部110により検出された動作と同じ動作を行うよう手ユニット123cの動作を制御する動作指令生成部131を有する。
(もっと読む)
ロボット安全監視装置
【課題】ロボットの工具交換時における安全性を向上させる。
【解決手段】ロボット制御装置から出力されロボットの各軸を駆動するモータの動作変位量に関する指令値を入力する動作変位量入力する。動作変位量の変化に伴って運動するロボットの教示基準点の実空間上における位置座標を、指令値に基づいて算出する。ロボット制御装置から出力され、ロボット制御装置が管理上使用する現在の工具を示す第1工具識別情報を入力する。ロボットに取り付けられた工具を検出してその工具を識別するための第2工具識別情報を入力する。第1工具識別情報と第2工具識別情報とが不一致か否かを判定する。初めて不一致が検出された時刻における教示基準点の位置座標を基準座標として、この基準座標を内部に含む領域を所定領域とする。不一致と判断されている期間において、教示基準点の位置座標が、所定領域の外部に存在するようになった時には、ロボットを安全な状態にするための非常停止信号が出力される。
(もっと読む)
ロボットシステム
【課題】本発明の課題は、ケーブル使用量の低減を図れるとともに、安全確実かつ継続的にロボットの運用が可能であり、また、ロボットの組み立て、設置、移設、修理等を簡単に行い得るロボットシステムを提供することにある。
【解決手段】本発明に関わるロボットシステムS1は、動力源60の残りエネルギを求める残エネルギ取得手段70、200と、動作指令に対して、予め準備された仮想モデルに対して動作指令を仮想的に実行することにより、動作指令を実行した場合の消費エネルギを予測するシミュレータB002と、動力源60の残りエネルギとシミュレータB002で予測した消費エネルギとを比較して動作指令を実行可能か否か判断する実行可否判断手段200と、比較判断の結果、動作指令を実行可能と判断した場合に動作指令をロボット110、130、140、150に実行させる実行手段200とを備えている。
(もっと読む)
ロボット玩具およびその組立方法
【課題】ロボット玩具のホームポジションとサーボ・ゼロ位置とを簡単に合致させる。
【解決手段】ロボット玩具1は、サーボ3が取り付けられたブロック10と、ボス21aにサーボ3の出力軸34が嵌合することによってブロック10に連結される他のブロック21と、サーボ3を制御する制御装置100とを備える。サーボ3には、出力軸34に追従して回転する回転盤33aと、回転盤33aに対向して配設されるとともに、ユーザ操作に基づいて回転盤33aと平行な面内で当該回転盤33aに対して相対回転する回転盤33bと、回転盤33a,33bにおける基準線33c,33d同士の相対角度を検出する回路パターン8,9とが設けられている。制御装置100は、出力軸34とともに回転盤33aを回転させ、前記相対角度が0となるときのサーボ3の位置を中心位置としてサーボ3を制御する。
(もっと読む)
基板搬送用ロボット及びそれを備えた基板搬送装置、半導体製造装置
【課題】基板搬送用ロボットにおいて、基板を目的位置へ搬送する場合の搬送経路の選択肢を増やし、これにより搬送時間の最短経路を選択することを可能にさせる。
【解決手段】基板搬送用ロボットのコントローラが、複数の教示位置が教示された際、教示位置の各々に対するアクセス待機位置11を生成し、アクセス待機位置11から基板搬送用ロボットの最小旋回姿勢12までの複数の経路を生成して記憶する。。
(もっと読む)
家事支援ロボットアームの移動制御システムおよび移動制御方法および移動制御プログラム
【課題】最適な待機位置を求めることで、平均の待ち時間を短くすることができる家事支援ロボットアームの移動制御を提供する。
【解決手段】人検出手段402と、物品検出手段403と、検出履歴データベース404と、作業履歴データベース406と、属性管理データベース407と、物品から作業が行われる可能性のある候補位置を求める作業候補位置決定手段408と、前記候補位置において、次に作業が行われる可能性を求める作業確率算出手段409と、前記候補位置において、次の作業が行われると想定したときの、作業確率を考慮した待ち時間の最大値を最小化する待機位置を求めるアーム位置算出手段410を備える。
(もっと読む)
ロボット制御装置、ロボット制御方法及びロボット搬送装置
【課題】ロボットハンドがワークに干渉することがなく、退避点(作業基準位置)に戻るまで短い時間で迅速に移動させることができ、さらにプログラムの管理が容易なロボット制御装置を提供する。
【解決手段】プログラムを複数の動作区間に分割すると共に、分割された各動作区間に対して迂回動作の種別を指定する退避点復帰管理手段13と、動作経路命令を実行する際に、動作区間が、後退移動区間であるときには、この動作経路命令を動作経路記憶手段11に記憶しておき、中断停止入力があった際に、動作区間が、後退移動区間であるときに、動作経路記憶手段11に記憶されている動作経路命令を逆順に実行した後、退避点に復帰させるロボットプログラム実行手段7とを有している。
(もっと読む)
ロボット教示システム、及びこれに使用するコントローラ、教示操作端末、並びにロボット教示方法
【課題】 サーボをオフしてからロボットの可動部分が微小変位した場合であっても、サーボをオフすることにより停止した教示動作を簡易に再開することが可能なロボット教示システム、及びこれに使用するコントローラ、教示操作端末、並びにロボット教示方法を提供する。
【解決手段】 ロボット100とロボットコントローラ200と教示操作端末300とを有するロボット教示システムにおいて、コントローラ200又は教示操作端末300のいずれか一方又は双方に設けられ、ロボット100の教示動作がサーボをオフすることにより停止した場合に、その直前の位置座標Aを記憶するメモリと、教示操作端末300に設けられ、停止した教示動作を再開する契機を与える復帰スイッチ3041と、教示動作を再開する際に、ロボット100を、現在位置座標Bから位置座標Aへ復帰移動させる制御を行う復帰制御手段と、を備える。
(もっと読む)
アーム搭載ロボット
【課題】アーム部を複雑かつ大型化することなく、アーム部を安全確実に初期位置および初期姿勢に復帰できるようにする。
【解決手段】ロボット本体1は、アーム部2の全体を収納可能な収納スペース3を備えており、ロボット本体1の側面には、ロボット本体1とアーム部2の動作を制御するためのコントロール基板4と、アーム部2の各関節位置を検出するためのセンサ5とが取り付けられている。アーム部2をロボット本体1内の収納スペース3に収納できるため、作業をしていないときにアーム部2が誤動作して人間に危害を与える等の不具合を確実に防止できる。アーム部2の位置や姿勢を検出するセンサ5をアーム部2ではなく、ロボット本体1に設けるため、アーム部2の構造を簡略化でき、かつセンサ5からの検出信号をロボット本体1に送信する配線も不要となる
(もっと読む)
1 - 20 / 23
[ Back to top ]