
Fターム[3C007MT04]の内容
マニピュレータ、ロボット (46,145) | 制御の目的(安全以外) (972) | 精度、正確性の向上 (181)
Fターム[3C007MT04]に分類される特許
1 - 20 / 181
ロボット制御装置およびキャリブレーション方法
【課題】ロボットの関節軸を動作限界位置でキャリブレーションできない場合においても、限られた空間の中で精度良くキャリブレーションすることが可能な技術を提供する。
【解決手段】ロボット制御装置200は、ロボット本体の関節軸上の任意のキャリブレーション位置に関節軸が移動された場合において、アブソリュートエンコーダから位置情報を取得し、取得した位置情報に含まれる一回転内位置が、多回転位置をカウントする基準となる原点を含まない所定の許容範囲に含まれるか否かを判定する。そして、一回転内位置が、許容範囲に含まれない場合には、一回転内位置が許容範囲に含まれるまで、キャリブレーション位置の移動を要求し、一回転内位置が許容範囲に含まれる場合には、取得した位置情報と関節軸の制御位置とに基づいて、関節軸の位置を補正するための補正値を決定する。
(もっと読む)
ロボット駆動方法及びロボット

【課題】回生エネルギーの発生自体を抑制しつつ、外力やロボットの状態変化に対して強い動作を行なわせることができる駆動方法を提供する。
【解決手段】目標位置に向かって可動部を移動させる際に、駆動力を動力発生部に発生させることにより、可動部を目標位置に向けて加速を行なわせる加速工程のステップS104と、一定速にするよりも動力発生部における発生力の小さい制御を行なう予備減速工程のステップS105と、目標位置に向かう方向とは逆方向の駆動力を発生させて可動部を減速させ目標位置に停止させる減速停止工程のステップS106を行なわせる。この際に予備減速工程のステップS105の一部において予備減速推移演算工程S102で演算した指令速度を基にした速度制御を行なう。
(もっと読む)
加工ロボットの軌道追従装置と方法
【課題】従来の倣い制御または力制御による加工速度を超える高速で、ロボットアームの弾性変形や加工工具の減耗の影響なしに、高精度の倣い加工をすることができる加工ロボットの軌道追従装置と方法を提供する
【解決手段】(A)ワーク1のCADモデルから軌道データDを生成して記憶装置24に記憶し、(B)軌道データDを目標軌道として加工工具3を位置制御するとともに動作中の加工反力を計測しておき、(C)加工後に、計測した加工反力の計測値から目標押付力で動作するように目標軌道を修正する学習を実施し、この加工と学習を繰返す。
(もっと読む)
トルクセンサ校正装置、校正方法、及びプログラム
【課題】多関節ロボットに搭載されたトルクセンサの校正を高精度かつ容易に行うこと。
【解決手段】トルクセンサ校正装置10は、複数のリンクと各リンクを回転可能に連結する複数の関節と、を有する多関節ロボット100に搭載され、関節のトルクを計測するトルクセンサ1と、多関節ロボット100の接触点に作用する外力を計測する力センサ2と、トルクセンサ1により計測された関節のトルクと、力センサ2により計測された外力と、多関節ロボット100のベースリンクに関する運動方程式と、に基づいて、その運動方程式の最小力学パラメータと、トルクセンサ1のトルクのオフセット値と、を同時に同定する同定手段と、を備えている。
(もっと読む)
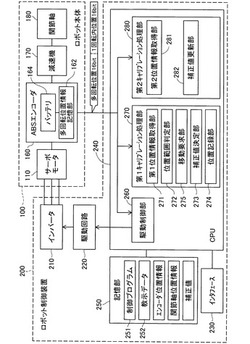
ロボットシステム、ロボット制御装置およびロボット制御方法
【課題】高精度の位置決めを容易に行うこと。
【解決手段】隣接するリンクが関節を介して連結され、関節にモータ11とモータ11の駆動力をリンクに伝達する減速機12とが設けられたロボット2において、モータ11の回転角度を検出する第1の検出部と、減速機12の出力軸の回転角度を検出する第2の検出部とを備える。ロボット制御装置3は、第1の検出部による検出結果および第2の検出部による検出結果に基づいて、モータ11の位置指令を補正し、補正した位置指令Prefを出力する。
(もっと読む)
ロボット、ロボットシステムおよび回転電機
【課題】モータの駆動力をリンクに伝達する減速機の出力軸の回転角度をより精度よく検出すること。
【解決手段】モータ11と、モータ11の駆動力をリンクである下部アーム26bに伝達する減速機12と、減速機12の出力軸125の回転角度を検出するエンコーダ14bとを備える。そして、第2のエンコーダ14bは、減速機12の出力軸125に軸継手140を介して連結される。かかる第2のエンコーダ14bの検出結果に基づいてモータ11の位置指令が補正される。
(もっと読む)
画像処理装置および画像処理システム
【課題】撮像装置に対する撮像指示を発生してから実際に撮像が行われるまでにタイムラグが存在する場合であっても、正確にトラッキング処理を行うことのできる視覚センサを提供する。
【解決手段】画像処理装置は、搬送装置の搬送経路における移動量を示す信号を受付けるインターフェイスと、搬送経路において撮像部の撮像範囲より下流側に配置されるとともにワークを取り扱う移動機械、を制御するための制御装置と通信するためのインターフェイスと、撮像部の撮像によって得られた画像に対して計測処理を行うことで、画像中の予め登録されたワークに対応する領域の位置情報を取得する手段と、制御装置との間で搬送経路における移動量を同期して保持する手段と、撮像指示に応答して撮像部による撮像を開始する手段と、位置情報と当該位置情報の取得に用いた画像を撮像したときの移動量とを制御装置へ送信する手段とを含む。
(もっと読む)
マイクロフォンシステム
【課題】音声認識に必要な振動数領域内の固体伝播音及び空気伝播音によるノイズを抑制することが可能なマイクロフォンシステムを提供する。
【解決手段】マイクロフォンシステムは、受音部21が前面側に設けられたマイクロフォン22、及びマイクロフォン22の後面側に取り付けられたウェイト23を有するマイクロフォンユニット20と、音穴11と連通する開口31を有し、マイクロフォンユニット20の前面側と頭部筐体10とにそれぞれ密着して配置される第1柔軟部材30と、頭部筐体10に固定されたケーシング40と、ケーシング40に保持され、マイクロフォンユニット20の後面側に密着して配置される第2柔軟部材50とを備える。
(もっと読む)
ロボットシミュレーション装置、ロボットシミュレーション方法、及びロボットシミュレーションプログラム
【課題】シミュレーションを行うハードウェア資源によってシミュレーションの結果が互いに異なることを抑えてハードウェア資源間でのシミュレーションの結果の差異を少なくすることの可能なロボットシミュレーション装置、ロボットシミュレーション方法、及びロボットシミュレーションプログラムを提供する。
【解決手段】仮想ロボットを軌道に沿って動かすロボットシミュレーション装置であって、前記仮想ロボットの軌道をサンプリング時間Tpだけサンプリングするプロセスである軌道計算プロセスP1を割り込み間隔Tiで行う軌道計算部と、前記サンプリング時間Tpが前記割り込み間隔Ti以下となる範囲で前記サンプリング時間Tpと前記割り込み間隔Tiとの双方を各別に可変にする時間可変部とを備える。
(もっと読む)
ワークの特定部位認識方法及びその装置
【課題】 ワークの特定部位の位置を速やかに認識することができるワークの特定部位認識装置を提供する。
【解決手段】 ワーク1の特定部位であるボルト孔7,8を認識するワークの特定部位認識装置であって、ワーク1を撮像するカメラ2と、このカメラ2が撮像するワーク1を把持する関節型ロボット3と、この関節型ロボット3によるワーク把持位置を関節型ロボット3の座標系に基づいて算出し、ワーク把持位置と特定部位であるボルト孔7,8との相対的位置関係に基づいてカメラ2の認識領域を、特定部位であるボルト孔7,8を含む周辺領域に限定する認識領域限定手段9を備える。
(もっと読む)
基板位置検出方法
【課題】搬送ロボットにより基板を搬送する際に、ハンド上の基板の中心位置の検出精度を向上できるようにした基板位置検出方法を提供する。
【解決手段】ハンド7に、搬送経路上の所定位置に設定した検出点PSに基板の周縁があるか否かを検出するセンサで検出可能な指標として、R方向に所定距離LR0離れた第1指標73と第2指標74とを設ける。第1指標73が検出点にあると検出されたときのロボット動作量から求めたハンドのR方向位置を基準位置として、基準位置から、第2指標74が検出点にあると検出されたときのロボット動作量から求めたハンドのR方向位置までの変位量LRを算出し、この変位量LRと指標73,74間の距離LR0との比を補正係数として算出する。そして、基板の周縁の各箇所が検出点にあると検出されたときのロボット動作量から求めたハンドのR方向位置を、当該R方向位置と基準位置との偏差に補正係数を乗算して補正する。
(もっと読む)
人の動作における意図推定装置
【課題】人の動作において、表面筋電位等の生体信号に頼らずにそれが意図したものであるか否かを識別する。
【解決手段】人の動作している位置、および角度の計測方法を用いて動作情報を取得し(S700)人の動作を人が実現可能な範囲に制限し(S701)、その動作中における人の関節角度と動作している部位の先端位置の位置情報を抽出し(S702〜S703)多変量解析手法を用い(S704〜S709)、さらに人の動作が意図するものであるか否かを識別する閾値を用いて、人の動作がその人が意図するものであるか否かを識別する(S710)ことで、表面筋電位等の生体信号に頼らずに、動作が意図したものであるか否かを識別することを可能にした。
(もっと読む)
ロボット制御装置、ロボット制御方法およびロボットシステム
【課題】ロボットにおける所定の部位があらかじめ定められた位置へ移動したことを示す通知信号の出力を適切に行うこと。
【解決手段】ベクトル算出部が、基準部位置における基準部の移動方向を示す第1のベクトルと、信号出力位置および基準部位置間の相対位置を示す第2のベクトルとを算出するようにロボット制御装置を構成する。また、信号出力判定部が、ベクトル算出部によって算出された第1のベクトルおよび第2のベクトルに基づいて通知信号を出力するか否かを判定するようにロボット制御装置を構成する。
(もっと読む)
チャック装置
【課題】制御部においてワークの把持が誤って認識されることを簡単な構成にて防止する。
【解決手段】チャック装置5は、爪部62を、待機位置から把持位置へと向かう方向へ連続的に移動することによりワークを把持する把持部50を備え、把持部50には把持検出部51および判定回路52が取り付けられる。把持検出部51では、爪部62の待機位置からの移動において、爪部62が把持位置に到達した時にON信号が出力され、万一、把持位置を超えた場合にON信号の出力が停止される。判定回路52では、把持検出部51からのON信号の入力が所定時間継続した場合にのみ、ワークの把持を示す把持信号が外部の制御部12に向けて出力される。これにより、ワークが把持されていないにもかかわらず、爪部62が把持位置を通過する際に発生するON信号に起因して、制御部12においてワークの把持が誤って認識されることを、簡単な構成にて防止することができる。
(もっと読む)
医療用マニピュレータ
【課題】先端動作部の軌跡精度や位置決め精度を効果的に向上できる医療用マニピュレータを提供することを目的とする。
【解決手段】医療用マニピュレータ10における先端動作部12は、エンドエフェクタ19と、ヨー軸Oyを中心に動作可能な主軸部材100と、ロール軸Orを中心に動作可能なギア体102とを有する。ヨー軸操作指令を受けた場合、ヨー軸駆動系のガタ分を補償するように、主軸部材100の駆動源である第1モータ50aの補償制御がなされる。ロール軸操作指令を受けた場合、ヨー軸駆動系のガタおよび弾性変形に起因するヨー動作の発生を防止または抑制するように第1モータ50aの補償制御がなされる。
(もっと読む)
センサ装置及びロボット装置
【課題】検出部から出力される原検出信号から可撓体の振動に起因するノイズ成分を良好に除去し、フィルタ処理により得られる検出信号の位相の遅れを抑制する。
【解決手段】検出部101は、被測定対象の状態により変形する可撓体と、可撓体の変形量を検出し、検出結果を示す原検出信号102を出力するセンサとを有する。フィルタ部103は、フィルタ係数を用いて原検出信号102をフィルタ処理して得られる検出信号107を出力する。演算装置104は、原検出信号102に含まれる可撓体の振動数を演算により求める。変更部106は、フィルタ部103のフィルタ係数を変更して、フィルタ部103を、演算装置104により演算された振動数fを減衰させるフィルタとして機能させる。
(もっと読む)
ロボットシステム
【課題】ロボットの運転に際し、制御ユニット側からロボット側のエンコーダに対して適正な駆動電源を供給し、ひいてはエンコーダの検出性能を確保する。
【解決手段】ロボット10は、複数のモータ21〜26と複数のエンコーダ21a〜26aとを備えている。ロボット10と制御ユニット30とは電気ケーブル40を介して接続されており、それにはエンコーダ駆動電源を供給する電源ケーブル42が含まれている。制御ユニット30は、コントローラ31と電源回路32とを備えており、コントローラ31は、電源回路32で生成される電源電圧を、エンコーダ駆動に適した適合電源電圧に調整する。このとき、コントローラ31は、電源電圧を複数の段階で変更しながら設定し、電源電圧が設定された状態で、各エンコーダ21a〜26aの通信状況の良否を判定する。そして、通信状況が良好であると判定された時の電源電圧に基づいて、適合電源電圧を算出する。
(もっと読む)
吸着装置および搬送装置
【課題】弾性材料からなる吸着パッドにおける吸引口の位置精度を高め得る吸着装置および搬送装置を提供する。
【解決手段】吸着装置20には、金属製のホルダ30と、炭素を含む導電性のゴム等の弾性材料からなる4つの吸着パッド40a〜40dと、各吸着パッド40a〜40dを対応する吸引部33a〜33dに対して押圧した状態でホルダ30に固定される金属製の固定治具50とが設けられており、この固定治具50には、各吸着パッド40a〜40dの吸引口44が露出する開口が形成されている。
(もっと読む)
ロボット制御装置
【課題】複数の教示データを並行に起動して複数の制御対象の同期を取る方法では、同期ズレが発生する場合がある。
【解決手段】複数の制御対象A、B、Pを同期させて駆動するロボット制御装置1である。教示対象設定部6は、複数の制御対象の中からティーチペンダントTPによって選択された1つまたは複数の制御対象を、教示対象として設定する。教示対象作成処理部7は、教示対象毎に教示データを作成する。教示データ合成処理部8は、選択された複数の教示データを合成して1つの再生データTdを生成する。解釈実行部11は、再生データTdに基づいて複数の制御対象を同時に駆動する。教示作業は所望の制御対象毎に行い、これらを合成した再生データTdに基づいて再生運転することにより、教示作業が行いやすく、且つ再生運転時に同期ズレが発生することがないロボット制御装置を提供することができる。
(もっと読む)
タンデムアーク溶接システムを制御するロボットコントローラ、それを用いたアーク倣い制御方法およびタンデムアーク溶接システム
【課題】アーク倣いを任意の回転中心で行った場合においても、先行極に位置ずれが発生せず、溶接欠陥が生じることのないタンデムアーク溶接システムを制御するロボットコントローラ、それを用いたアーク倣い制御方法およびタンデムアーク溶接システムを提供する。
【解決手段】タンデムアーク溶接システムを制御するロボットコントローラ8は、先行極処理部11aが算出した先行極変化量から左右および上下方向の位置ずれを補正する先行極補正量を算出する先行極補正部14aと、後行極処理部11bが算出した後行極変化量から回転方向の位置ずれを補正する後行極補正量を算出する後行極補正部14bと、先行極2aの位置ずれを補正する回転中心補正量を算出する回転ずれ補正制御処理部16と、ティーチング位置と倣い補正時における溶接トーチ2の回転中心の位置を補正するロボット軌跡計画処理部13と、を備える。
(もっと読む)
1 - 20 / 181
[ Back to top ]