
Fターム[3D232DA43]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | 車両運動状態量 (8,041) | 上下方向速度、加速度(ジャークを含む) (55)
Fターム[3D232DA43]に分類される特許
1 - 20 / 55
車両用操舵装置
車両姿勢制御装置
【課題】湾曲した道路を車両が走行するときの車両の操縦性の向上に貢献する車両姿勢制御装置を提供する。
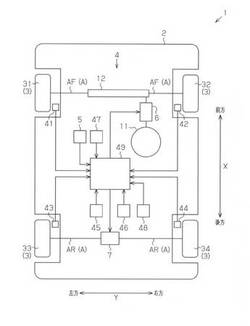
【解決手段】車両姿勢制御装置4は、車両1の姿勢を制御する前輪制御装置6および後輪制御装置7と、車両1の目標姿勢を決定する演算装置49とを備え、前輪制御装置6および後輪制御装置7が、車両1の姿勢を、演算装置49により決定された目標姿勢に近づける。演算装置49は、車両1が走行している湾曲した道路の曲率に係る情報、および湾曲した道路の幅方向における車両1の位置に係る情報の少なくとも一方の情報に基づいて、道路の湾曲に沿って曲がる曲線の接線に対して車両1の前後方向に延びる左右中心軸のなす角度を決定する。
(もっと読む)
車両姿勢制御装置

【課題】タイヤのグリップ状態およびスリップ状態の双方において、車両仕様の変更による影響を受けることなく、目標方向に対する車両の進行方向のずれを小さくすることのできる車両姿勢制御装置を提供する
【解決手段】ヨーレートセンサの出力を「実ヨーレートγ」とし、車両1の左右中心軸C上に存在する任意の基準点において、進行方向DFが車両1の左右中心軸Cのうち基準点よりも前方の部分に対してなす角を「車体すべり角β」とし、目標方向BFが車両1の左右中心軸Cのうち基準点よりも前方の部分に対してなす角を「目標すべり角β*」とし、目標すべり角β*と車体すべり角βとの差(β*−β)を「角度差Δβ」とする。所定の目標方向BFに対する車両1の進行方向DFの角度を制御するために、車両姿勢制御装置は、角度差Δβの符号と実ヨーレートγの符号との関係に応じて車両1の前輪31,32および後輪33,34の少なくとも一方を制御する。
(もっと読む)
車両用操舵装置および車両用操舵装置の製造方法
【課題】ハウジング内で転舵軸の移動量を規制することができ、しかも小型で強度に優れた車両用操舵装置を提供する。
【解決手段】電動モータ21,22の回転動力をボールねじ機構23を介して転舵軸6の軸方向X1の移動に変換する、ステアバイワイヤ式の車両用操舵装置1である。転舵軸6の移動方向に応じて、転舵軸6の中間部のねじ軸32の両端の当接部45,46が、ロータ26内を挿通して、対応するストッパ47,48に当接することにより、転舵軸6の移動量を規制する。ストッパ47,48をハウジングとは別部材の強度の強い材料で構成する。
(もっと読む)
車両用操舵装置
【課題】操舵用の電動モータのフェール時にも、転舵輪の向きを容易に変位することのできる車両用操舵装置を提供する。
【解決手段】電動モータ21,22のロータ31,41によって駆動されるボールナット48と、転舵軸6に設けられボールナット48にねじ結合されたねじ軸47とを含むボールねじ機構23が設けられている。転舵軸6の回転は、第1規制機構60によって規制されている。ねじ部材58は、ブッシュ26から取り外すことが可能である。ねじ部材58は、ハウジング5の第2雌ねじ部63およびロータ31の第2挿通孔64を挿通することにより、ロータ31,41の回転を規制する。このとき、ブッシュ26を回転させることにより、転舵軸6は、ボールナット48に対して回転しながら、軸方向X1に変位し、転舵輪の向きが変わる。
(もっと読む)
車両挙動制御装置
【課題】制動装置による車両の挙動に対する介入を抑制し、燃費の低下を抑制することが可能な車両挙動制御装置を提供する。
【解決手段】制御ユニット1は、車両100の走行状態に基づいて、制動装置4,駆動力伝達装置5,操舵装置6,及び懸架装置7を制御する装置制御部10と、装置制御部10から制御対象の装置に対する制御量を示す情報を取得する制御量取得手段111、及び制御量取得手段111が取得した情報に基づいて、制動装置4,駆動力伝達装置5,操舵装置6,及び懸架装置7の制御量を減少させる指令信号を出力する制御量調整手段112を有する協調制御部11とを備える。
(もっと読む)
電動パワーステアリング装置
【課題】平坦路と悪路の走行時の車両の直進安定性と操舵フィーリングの向上を図ることが可能な電動パワ−ステアリング装置を提供する。
【解決手段】モータは、二系統のモータコイルに共通のステータ及びロータを有しており、ECU(制御手段)は、これらの各モータコイルに対して、それぞれ独立に駆動電力を供給することにより、そのモータトルクを制御する。
車両が悪路走行していると判断した場合には、操舵トルク及び車速に応じてアシストトルクを制御するトルク制御を実行している系統の他方の系統のモータの少なくとも二相間を短絡して制動動作させる。
(もっと読む)
車両用操舵装置
【課題】回り止めを不要にでき、特に後輪を転舵する場合に好適に使用できる車両用操舵装置を提供する。
【解決手段】操舵部材と転舵機構A1の機械的な連結が断たれている。転舵軸6の一部に設けられた第1のねじ軸37および第2のねじ軸44が互いに逆ねである。第1のねじ軸37に第1のボール39を介して係合する第1のボールナット38を第1の電動モータ21によって回転駆動する。第2のねじ軸44に第2のボール46を介して係合する第2のボールナット45を第2の電動モータ22によって回転駆動する。第1のボールナット38の回転方向R1と第2のボールナット45の回転方向R3とは逆方向である。
(もっと読む)
運転支援装置
【課題】旋回半径が変化するような場合であっても、適切な目標軌道を設定することが可能な運転支援装置を提供すること。
【解決手段】前方道路を含む所定エリアに設定した複数のポイントの運動に関して、車両の運転者の注視点への視線方向を軸として、その軸周りで回転する回転運動成分を算出し、回転運動成分の大きさが等しい等ポテンシャルラインを車両の目標軌道として設定する。これにより、車両が旋回しようとするカーブ路の旋回半径が途中で変化している場合であっても、その旋回半径の変化に応じて動的に回転運動成分の強度分布も変化するので、等ポテンシャルラインにより適切な目標軌道を設定することができる。
(もっと読む)
車両用操舵装置
【課題】耐久性に優れた車両用操舵装置を提供することである。
【解決手段】第1及び第2の電動モータ21,22によってボールナット34を回転駆動し、ねじ軸33を有する転舵軸6の軸方向移動に変換して、転舵する。両電動モータ21,22が共通のロータコア28を有する。ロータコア28の肉厚tが、中央部283から各端部281,282に近づくにしたがって次第に薄くなる。路面反力によるラジアル荷重F1が転舵軸6の端部61に負荷されて、ねじ軸33が撓むときに、その撓みに追従して、ロータコア28が撓み、ボールナット34を径方向に変位させる(逃がす)。ボールナット34が、ねじ軸33の撓みに抗してラジアル方向に突っ張るようなことがない。
(もっと読む)
車両運動制御システム
【課題】単一の前輪とその前輪より後方側に配設された左輪および右輪とを有する車両に搭載されて車両の運動を制御するシステムであって、車両の斜め前方への転倒を防止することが可能な車両運動制御システムを提供する。
【解決手段】制動かつ旋回状態にある場合において車両が転倒する可能性が高くなった場合に、車両がさらに旋回内側を向くように車両の運動を制御する。車両を旋回内側に向けることで、制動旋回によって車体に作用する力の向きを、車両が転倒しにくい向き、例えば、車幅方向に平行な向き等に変更することが可能となる。したがって、本車両運動制御システムによれば、車両の転倒を防止することが可能となる。
(もっと読む)
車両用運転操作補助装置、車両用運転操作補助方法および自動車
【課題】運転者に対し、より適切に車両の運転操作の補助を行うこと。
【解決手段】車輪と車体との間に介在された能動型のサスペンション装置と、車両周囲の障害物を検出する障害物検出手段と、障害物検出手段によって検出した障害物の種類を判別する障害物判別手段と、障害物判別手段の判別結果に基づいて、傾斜角を有する仮想路面を設定する仮想路面設定手段と、仮想路面設定手段によって設定した仮想路面の傾斜角と対応させて、能動型のサスペンション装置を制御し、車体を傾斜させる車体制御手段と、障害物検出手段によって検出した障害物への接近度合いに応じて、操舵反力を制御する操舵反力制御手段とを備える。
(もっと読む)
半自律型車両の遠隔操縦システム
【課題】所期の走行経路から外れて走行したときにも、所期の走行経路に容易に復帰できるようにする。
【解決手段】本発明は、測距部11,12、撮像部13及び走行機構Dを有し、自律走行と遠隔操縦可能な半自律型車両と、測距部11によって取得した画像を表示する表示部、及びその表示部に表示された画像に基づき半自律型車両の操縦コマンドを送出する遠隔操縦装置とを有する半自律型車両の遠隔操縦システムであって、操縦コマンドの受信が中断したか否かを判定するコマンド受信中断判定手段10aと、当該中断判定したときの受信中断位置情報を取得する中断位置情報取得手段10bと、自律走行を行わせる自律走行手段10cと、操縦コマンドの受信が再開したか否かを判定するコマンド受信再開判定手段10dと、受信再開位置情報を取得する再開位置情報取得手段10eと、復帰走行させる復帰手段10gとを半自律型車両に設けている。
(もっと読む)
車両のトー角制御装置
【課題】 車両のトー角制御装置において、アクチュエータの機械的なガタの範囲内における制御が過剰となることを防止する。
【解決手段】 自動車100の各車輪3のトー角を個別に変化させる電動アクチュエータ8と、自動車100の操舵角、車速、ヨーレイト等を検出する各種センサ10〜17とを有し、操舵角、車速、ヨーレイトに基づいて電動アクチュエータ8の目標制御量を設定し、目標制御量に基づいて電動アクチュエータ8を駆動制御するトー角制御装置6であって、自動車100が走行する路面上の障害物と車輪3とが接触することによって電動アクチュエータ8に負荷が加わることと予測されるときに、目標制御量を低減させるべく補正係数を設定する補正係数設定部53と、補正係数に応じて目標制御量を低減させるべく制御ゲインを低減させる制御ゲイン設定部54とを有することを特徴とする。
(もっと読む)
車両の自動操舵制御装置
【課題】車両を目標走行線に追従させるための操舵角修正が頻繁になることを防止すると共に乗り心地を快適に維持する車両の自動操舵制御装置を提供する。
【解決手段】道路に配置された指標から自車が走行するべき目標走行線を設定して自動操舵を行う車両の自動操舵制御装置であって、各タイヤにタイヤ圧力センサを備え、各サスペンションに該サスペンションを駆動するサスペンションアクチュエータを備え、上記各タイヤのタイヤ圧力の関数で定義される操舵安定状態量が所定値となるように上記各サスペンションアクチュエータを制御するコントローラを備える。
(もっと読む)
4輪操舵車両
【課題】後輪操舵によって運転性能を高めつつ、後輪操舵を行った際に生じる運転フィールの違和感を低減する。
【解決手段】後輪トー角操舵トルク値設定部32は、操舵トルクTに基づいて、ヨーレイト規範値を設定するヨーレイト規範値設定部、横加速度規範値を設定する横加速度規範値設定部および、ロールレイト規範値を設定するロールレイト規範値設定部と、これら各規範値に基づいてそれぞれ後輪トー角ヨーレイト値を設定する後輪トー角ヨーレイト値設定部、後輪トー角横加速度値を設定する後輪トー角ヨーレイト値設定部および、後輪トー角ロールレイト値を設定する後輪トー角ロールレイト値設定部とを備え、目標後輪トー角設定部33が後輪トー角ロールレイト値を含ませて目標後輪トー角を設定する。
(もっと読む)
車両用運転操作補助装置、車両用運転操作補助方法および自動車
【課題】運転者に対し、より適切に車両の運転操作のための情報を伝達すること。
【解決手段】本発明に係る自動車では、情報伝達制御手段が、運転者に入力される上下方向の動きを、リスクポテンシャルの大きさに応じて抑制して運転者に伝達し、リスク伝達手段が、リスクポテンシャルの大きさに応じて、操作反力付与手段における反力を付与する。
(もっと読む)
車両挙動制御装置
【課題】高速旋回走行時など、車輪の接地荷重が増大した場合にも円滑な操舵制御を実現するための車両挙動制御装置を提供する。
【解決手段】ECU20は、ステップS2で後輪目標舵角δrrtと後輪実舵角δrrrとの差Δδrrが異常判定閾値δthを超えたか否かを判定し、この判定がYesになると、ステップS3で横Gセンサ12から入力した横加速度Gyが加速度判定閾値Gythを超えたか否か、すなわち後輪操舵アクチュエータ8rが作動遅れが右後輪3rrの接地荷重の増大によって引き起こされたか否かを判定する。ステップ3での判定がYesであった場合、ECU20は、ステップS4で接地荷重低減指令を減衰力制御部22の減衰力補正部32に出力し、後輪3rのダンパ4rの目標減衰力を低下させるように補正する。
(もっと読む)
車両用運転操作補助装置、車両用運転操作補助方法および自動車
【課題】より運転者の意図に整合する運転操作支援を行うこと。
【解決手段】本発明に係る自動車では、制御仮値設定手段が、自車両のリスクが縮小する方向に車両制御手段における車両制御の仮値を設定し、仮値に基づいて車両制御手段が実行した車両制御に対する運転者の応答操作を応答検出手段が検出する。制御本値設定手段は、応答検出手段によって検出された運転者の応答操作に基づいて、車両制御の本値を設定する。
(もっと読む)
後輪操舵制御装置
【課題】 悪路走行時の乗り心地を改善することができる車両の後輪操舵制御装置を提供する。
【解決手段】 車体1と後輪3rl,3rrとの間に介装され、伸縮することによって後輪3rl,3rrのトー角を変更する電動アクチュエータ8を備えた車両の操舵制御装置6であって、車両Vが走行している路面の状態を推定する路面状態推定手段(路面状態推定部63)を有し、路面状態推定手段63によって悪路判定がなされた場合、アクチュエータ8を中立状態に維持することを特徴とする。
(もっと読む)
1 - 20 / 55
[ Back to top ]