
Fターム[3D233CA16]の内容
パワーステアリング装置 (30,926) | 電気式パワーステアリング (28,865) | 電動機などの制御のための検出 (13,688) | 操舵の状況 (7,023) | 操舵力、操舵トルク、反力 (3,530)
Fターム[3D233CA16]に分類される特許
21 - 40 / 3,530
四輪操舵制御装置
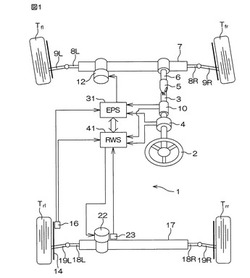
【課題】パワーステアリング装置が故障する場合に備えて、四輪操舵装置の後輪の転舵機能を利用して、車両の転舵ができる四輪操舵制御装置を提供する。
【解決手段】操舵部材2の操作に基づく操舵トルクを検出するトルクセンサ10と、操舵角を検出する操舵角センサ4と、トルクセンサ10の検出値に基づいて前輪を転舵するための補助力を得る操舵補助制御部31と、操舵角センサ4若しくはトルクセンサ10の検出値に基づいて後輪を転舵制御する転舵制御部41とを備え、転舵制御部41は、操舵補助制御部31の機能に故障があると判定された場合に、後輪を逆相側でのみ転舵制御する。
(もっと読む)
電動パワーステアリング装置

【課題】1シャント式電流検出回路でモータ各相電流の検出を行うと共に、電流検出回路の故障(異常)を簡易な構成で確実に行い、安全性を高めた電動パワーステアリング装置を提供する。
【解決手段】インバータに接続された1つのシャント抵抗と、シャント抵抗の両端に正方向に接続され、モータの相電流を検出してアシスト制御の制御用モータ電流検出値とする制御用モータ電流検出回路と、シャント抵抗の両端に逆方向に接続され、制御用モータ電流検出回路の故障を検出するための診断用モータ電流検出回路とを具備し、1シャント式でモータの各相電流を検出してアシスト制御を行うと共に、シャント抵抗の両端電圧を増幅する回路を2系統とする。
(もっと読む)
ウォーム減速機及び電動パワーステアリング装置
【課題】歯打ち音が低減し、振動も低減し、耐久性を向上させることができるウォーム減速機を提供する。
【解決手段】ウォーム32と、ウォームホイール31とが噛合してなるウォーム減速機30である。ウォーム32はアルミダイカスト製であり、このウォームの少なくともギア歯に、硬質アルマイト処理がなされている。
(もっと読む)
減速機構及び電動パワーステアリング装置
【課題】ウォームホイールの回転方向に拘らず、歯面間の潤滑状態を良好に維持することができる減速機構を提供する。
【解決手段】バックラッシ除去のためにウォーム軸20の第1端部22を中心としてウォーム軸20をウォームホイール21側(予圧方向Y1)へ付勢する。ウォーム軸20がウォームホイール21の手前に見える状態で減速機構19を見たときに、第1回転方向J1に回転するウォーム軸20により回転されたウォームホイール21の噛み合い領域MAの移動方向が、ウォーム軸20の第1端部22側に向く左手中指方向LMFに向く。予圧方向Y1が左手人指し指方向LIFに向き、オフセット方向Z1が左手親指方向SFに向く。
(もっと読む)
電動パワーステアリング用の電子制御ユニット
【課題】小型の電動パワーステアリング用の電子制御ユニットを提供する。
【解決手段】電動モータと一体に形成される電動パワーステアリング用の電子制御ユニットは、外部のバッテリの正極及び負極の電位を入力する第1及び第2の入力端子B+,B−を有する外部コネクタと、電動モータに駆動信号を供給するスイッチング回路、駆動信号の元となる電源電圧を平滑する電解コンデンサ210及びスイッチング回路を制御する制御回路を有する制御基板200と、制御基板200を格納するユニットカバーと、を備える。制御基板200は、ノーマルフィルタとして機能するコイル220及びコモンフィルタとして機能する第1〜第4のセラミックコンデンサC1〜C4を有する。C1の容量は、C3の容量と同じであり、C1の容量よりも小さいC2の容量は、C4の容量と同じである。
(もっと読む)
電動パワーステアリング用の電子制御ユニット
【課題】 小型の電動パワーステアリング用の電子制御ユニットを提供する。
【解決手段】 電動モータ43と一体に形成される電動パワーステアリング用の電子制御ユニット43は、電動モータ43に駆動信号を供給するスイッチング回路110を有する第1の基板100と駆動信号の元となる電源電圧を平滑する電解コンデンサ210を有する第2の基板200とスイッチング回路100を制御する制御回路を有する第3の基板300と第1の基板100、第2の基板200及び第3の基板300を格納するユニットカバー420とを備える。ユニットカバー420の開口部425は、電動モータ43を格納するモータカバー430によって閉じられ、第1の基板100、第2の基板200、第3の基板300及びモータカバー430は、電動モータ43のモータ軸450の方向DR1にモータカバー430第3の基板300第2の基板200及び第1の基板100の順で配置される。
(もっと読む)
電動パワーステアリング制御装置
【課題】車両のヨー応答を低下させることなくロール振動を抑制する
【解決手段】EPSシステム1では、アシスト補償量演算部22が、車両の運転者によるハンドルの操作が反映された操舵トルクと、車両の挙動が反映された推定路面反力とに基づき、次の(a)および(b)の2つのゲイン特性を満たすようにアシスト補償量を演算する。(a)操舵トルクに対する補正アシスト量のゲイン特性については、操舵トルクの周波数が予め設定された第1設定周波数を超えると、周波数が高くなるにつれて補正アシスト量のゲインが徐々に減少する1次フィルタの形状を有する。(b)推定路面反力に対する補正アシスト量のゲイン特性については、推定路面反力の周波数が、第1設定周波数より高くなるように予め設定された第2設定周波数になるまでは、周波数が高くなるにつれて補正アシスト量のゲインが徐々に増加する、推定路面反力の微分特性を有する。
(もっと読む)
ステアリング装置およびフォークリフト
【課題】機械的な接触を行うことなく、実際の操舵角を目標操舵角で適切に維持できるようにする。
【解決手段】実際の操舵角(検出操舵角)が目標操舵角に到達するまでは、ステアリング51の操作トルクに応じて操舵輪に付与される操舵トルクが、漸減舵角範囲にわたって上限値から下限値にまで減少していく一方、目標操舵角に到達した以降は、逆方向の操舵トルクが、この漸減舵角範囲よりも狭い急峻舵角範囲にわたって下限値から上限値にまで増加していく。このように、操舵トルクが変化する操舵角範囲を、目標操舵角への到達以降において狭くすることで、操舵トルクの変化率が大きくなるため、その到達前に比べて操舵トルクが急峻に上限値まで増加していく。こうして、実際の操舵角が目標操舵角に到達した以降は、逆方向の操舵トルクが十分に大きくならない、というような操舵角範囲も当然狭くなる(漸減舵角範囲>急峻舵角範囲)。
(もっと読む)
電動パワーステアリング用電子制御ユニット
【課題】一層の小型化をはかるとともに配線設計の自由度を得ながら装置の信頼性を向上させる。
【解決手段】電動パワーステアリング用電子制御ユニットに含まれる第1基板11と第2基板12は、外部接続コネクタ30が一体形成されたコネクタケース13を介して積層され、コネクタケースの第1の縁部と第2の縁部には、第1の面実装部品110と第2の面実装部品120とを接続するインサートモールド成形された端子群131,132,133がそれぞれ実装される。第2基板12に実装された第2の面実装部品120のそれぞれは、第1の縁部に実装された端子群と第2の縁部に実装された端子群のうち、近くに位置する端子群に選択的に接続される配線レイアウト構造を有する。
(もっと読む)
磁界角計測装置およびそれを用いた回転機
【課題】磁束発生体が高速に回転する場合であっても、磁束発生体または磁気センサの近傍に非磁性の導体(導電体)を配置した構成を用いて精度良く磁界角または回転角を計測すること。
【解決手段】磁界方向に感応する磁気センサ70と、非磁性の第1の導体240と、非磁性の第2の導体242とを備えた磁界角計測装置であって、前記磁気センサは、前記第1の導体と前記第2の導体との間に配置され、前記第1の導体中の渦電流が前記磁気センサに及ぼす磁界と、前記第2の導体中の渦電流が前記磁気センサに及ぼす磁界とが、互いに打ち消しあう構成とする。
(もっと読む)
電動パワーステアリング装置
【課題】トルクセンサ、または電流センサの異常時においても、継続して安定したステアリング操作を行なうことのできる電動パワーステアリング装置を提供することにある。
【解決手段】ステアリングの操舵トルクを検出するトルクセンサと、操舵軸に加わる軸力を検出する軸力センサと、モータに流れる実電流を検出する電流センサとを備え、更に、トルクセンサ、軸力センサ及び電流センサの異常を検出する異常検出手段を有する。そして、上記異常検出手段により、軸力センサが正常、且つトルクセンサが異常の場合には、軸力センサにて、トルクセンサの値を推定する。また、軸力センサが正常、且つ電流センサが異常の場合には、軸力センサ及びトルクセンサにて、電流センサの値を推定することができる構成とした。
(もっと読む)
電動パワーステアリング用電子制御ユニット
【課題】一層の小型化をはかるとともに配線設計の自由度を得ながら装置の信頼性を向上させることができる、電動パワーステアリング用電子制御ユニットを提供する
【解決手段】電動パワーステアリング用電子制御ユニット(ECU1)は、第1の面実装部品(制御用面実装部品110)が実装される第1基板(制御基板11)と、第1の面実装部品より許容電流容量が高い第2の面実装部品(パワー用面実装部品120)が実装される、第1基板と略同一部品実装面積を有する唯一の第2基板(パワー基板)とを有し、第1基板と第2基板とを積層した基板実装構造から成る。
(もっと読む)
トルク検出装置および電動パワーステアリング装置
【課題】検出能力および検出精度の向上を図ることができるトルク検出装置およびこれを含む電動パワーステアリング装置を提供すること。
【解決手段】トルク検出装置17は、第1軸14および第2軸15を相対回転可能に連結するトーションバー16と、第1軸14に対して同軸状に固定される環状の磁石25と、第2軸15に対して同軸状に固定されるとともに、磁石25を非接触で取り囲みつつ軸方向においてギャップを隔てて対向配置される一対の磁気ヨーク26と、一対の磁気ヨーク26に発生する磁束の密度を検出するホールIC30とを含む。各磁気ヨーク26には、軸方向に突出しつつ周方向に等間隔で並ぶ複数の歯41が設けられていて、歯41は、磁気ヨーク26の径方向から見て、先端41B側へ向かって幅狭となっているとともに、角が丸められた曲線の輪郭Rを有している。
(もっと読む)
ラックピニオン式操舵装置
【課題】車両への搭載性に優れ、且つラックとピニオンの噛み合い率を高くできるラックピニオン式操舵装置を提供する。
【解決手段】ウォームホイール15の回転軸(第2操舵軸7の出力軸7b)とピニオン軸23とを、互いの軸角βを所望に設定可能な第1傘歯車81および第2傘歯車82を介して連結する。ラック26とピニオン25の噛み合い率を高くするように、ラック軸24の第2直交平面P2に対するピニオン軸23の中心軸線C4の傾斜角θを大きくする。電動モータ11のモータハウジング11aが、車両の他の部品と干渉することを防止するべくウォーム軸14および電動モータ11の出力軸12をラック軸24と平行に配置する。
(もっと読む)
トルク検出装置および電動パワーステアリング装置
【課題】一対の磁気ヨークの干渉を防ぎつつ、検出能力および検出精度の向上を図ることができるトルク検出装置およびこれを含む電動パワーステアリング装置を提供すること。
【解決手段】トルク検出装置17は、第1軸14および第2軸15を連結するトーションバー16と、第1軸14に固定される磁石25と、第2軸15に固定され、軸方向において対向配置される一対の磁気ヨーク26とを含む。各磁気ヨーク26は、ヨークリング40と、ヨークリング40において周方向に並ぶ複数の歯41とを含む。ヨークリング40は、歯41の根元部分41Aから径方向外側へ延びる延設部40Aと、延設部40Aの径方向外側端部から軸方向に折り返された折り返し部40Bとを含んでいる。軸方向X1に関して、一対の磁気ヨーク26の外法寸法Qが、磁石25の長さG以上である。
(もっと読む)
車両用操舵装置及び荷役車両
【課題】車両旋回時、特にハンドルの戻し時に運転者の操舵負担を低減することができる車両用操舵装置及び荷役車両を提供する。
【解決手段】操舵部材10の操舵角を検出する操舵角検出部13と、操舵部材10に操舵反力を付与する反力アクチュエータ15と、車体のヨー角を検出するヨー角検出部33と、少なくとも操舵角検出部13によって検出された操舵角の関数として操舵反力を設定し、その設定された操舵反力を実現するように前記反力アクチュエータ15を制御する反力アクチュエータ制御部16とを備え、反力アクチュエータ制御部16は、ヨー角検出部33によって検出された車体のヨー角の変化に基づいて車体の旋回量を観測し、観測された旋回量が基準角以上であれば、前記操舵部材に付与する操舵反力を、通常よりも増大させる。
(もっと読む)
電動パワーステアリング装置
【課題】インバータのFETの駆動を簡易な構成と制御で安定的に行い得るようにした電動パワーステアリング装置を提供する。
【解決手段】PWMの各相デューティ指令値に基づいて、FETブリッジで成るインバータ106によりモータ20を駆動制御し、操舵系をアシスト制御するようになっている電動パワーステアリング装置において、FETブリッジの上段FETを駆動するための昇圧電源電圧を生成するチャージポンプ回路130及びブートストラップ回路140を具備し、高い方の電圧を昇圧電源電圧とする。
(もっと読む)
電動パワーステアリング装置
【課題】ベルトの張力を増大調整する際の作業性を向上させること。
【解決手段】電動パワーステアリング装置100では、電動モータの回転軸21と同軸上に結合した駆動プーリ31の回転力を、ステアリング装置の回転部材と同軸上に結合した従動プーリ32に、ベルト33を介して伝達することによって、操舵アシストを行うように構成されている。電動パワーステアリング装置100には、ベルト33の張力を調整するベルト張力調整機構Aが設けられている。ベルト張力調整機構Aは、ステアリング装置のハウジング14に設けられた円形の支持部14aと、電動モータのケーシング22に回転軸21に対して偏心して設けられて支持部14aに対して回転可能に組付けられる連結部22aを備えるとともに、支持部14aに対する連結部22aの相対回転をベルト33の張力が増大する回転方向に許容し逆回転を規制する回転方向規制手段A1を備えている。
(もっと読む)
後輪転舵軸の規制機構
【課題】簡易な構成で後輪転舵軸の回転および並進を規制することが可能な後輪転舵軸の規制機構を提供する。
【解決手段】後輪転舵装置40は、後輪転舵軸50に対して移動可能な規制部材71と、規制部材71を後輪転舵軸50に向けて移動させるソレノイド74とを有する。後輪転舵軸50は、軸方向に延びる回転規制溝72を外面上に有する。回転規制溝72の底面72Bは、規制部材71の先端部分71Bの形状に対応するロック穴73を有する。ロック穴73は、底面72Bにおいて後輪転舵軸50の中立並進位置に対応する箇所に位置する。規制部材71は、後輪転舵軸50に対する位置として、先端部分71Bが回転規制溝72の各側面72Aに対向し、かつ先端部分71Bがロック穴73の外に位置する転舵位置、および先端部分71Bがロック穴73に嵌め込まれる固定位置を有する。
(もっと読む)
回転角検出装置、及びトルクセンサ
【課題】回転体の多回転の絶対回転角を検出することが可能でありながらも、構造の簡素化を図ることのできるトルクセンサを提供する。
【解決手段】このトルクセンサ14では、第1のレゾルバ40を通じて検出されるインプットシャフト20の回転角度と、第2のレゾルバ50を通じて検出されるロアシャフト21の回転角度との差分値に基づいてステアリングホイールに付与された操舵トルクを演算する。ここでは、インプットシャフト20と一体となって回転する太陽歯車61、磁性体により形成されて太陽歯車61の周囲を公転する遊星歯車63、及び遊星歯車63が噛合される内歯車62により構成される遊星歯車機構60を設ける。そして、第1のレゾルバ40から出力される電圧信号に基づいてインプットシャフト20の回転角及び遊星歯車63の位置を検出し、それらに基づいてステアリングホイールの操舵角を求める。
(もっと読む)
21 - 40 / 3,530
[ Back to top ]