
Fターム[5C122FH11]の内容
Fターム[5C122FH11]の下位に属するFターム
動き検出/動きベクトル検出 (2,089)
Fターム[5C122FH11]に分類される特許
41 - 60 / 2,971
画像表示装置およびカメラ
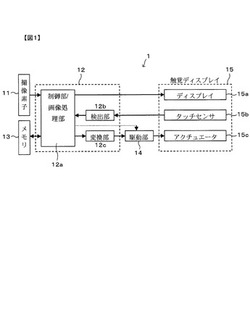
【課題】画像情報を振動として知らせること。
【解決手段】画像表示装置1は、画像を表示する表示装置15aと、接触面を振動させて触覚を与える触覚付与手段15cと、触覚付与手段15cの接触面による振動パターンを変化させる振動制御手段14と、画像に基づいて振動パターンを変化させるように振動制御手段14を制御する制御手段12aと、を備える。
(もっと読む)
撮像方法及び撮像ユニット

【課題】フロントガラス等の透明部材に付着した付着物と、透明部材の位置より遠方の情報とを、それぞれに好適な条件で撮像可能な撮像方法を提供する。
【解決手段】本撮像方法は、透明部材の一方の面側から、前記透明部材の他方の面に付着した付着物に向けて照射光を照射し、前記付着物と空気との界面で反射した前記照射光の反射光を、前記透明部材に対して前記光源と同じ側に配置され、焦点が前記透明部材の位置よりも遠方に設定された撮像レンズで集光して撮像する。
(もっと読む)
撮像装置
【課題】撮影者が被写体を撮影する際、被写体側から撮影者のことが撮像装置によって見えなくなってしまうことを防止する。
【解決手段】撮像部17で撮像される画像に基づいて、実空間に対応する3次元座標における第1被写体のひとみ位置を検出するひとみ位置検出部18と、実空間に対応する3次元座標における第2被写体の形状情報を検出する形状検出部20と、撮像部19で撮像される画像の情報と、第1被写体のひとみ位置と、第2被写体の形状状態と、記憶部22に記憶される表示部14の画像表示面P1の大きさとに基づいて、第1被写体のひとみ位置から第2被写体を見たときに表示部14の画像表示面P1に投影される第2被写体を含んで表示部14に表示される画像を生成する表示画像生成部13とを備えて撮像装置10を構成する。
(もっと読む)
画像処理装置およびプログラム
【課題】撮像画像中のプライバシー領域の保護および有効活用を同時に実現するための画像処理装置およびプログラムを提供する。
【解決手段】撮像画像からプライバシー領域を特定する領域特定部と、前記撮像画像の前記プライバシー領域内に、前記プライバシー領域内の画像と異なる情報を有する画像を挿入する画像処理部と、を備える画像処理装置。
(もっと読む)
電子カメラ
【課題】カメラ画像を取得可能なスマートフォンを適応的に調整する。
【解決手段】撮像装置18は撮像面で捉えられたシーンを表す生画像データを出力し、カメラ処理回路22は出力された生画像データをYUV形式の画像データに変換する。スマートフォンから発行された接続要求が通信I/F42によって受信されると、カメラCPU32は、カメラ処理回路22から出力された画像データを要求元のスマートフォンに転送し、要求元のスマートフォンに割り当てられた顔画像情報を検出する。カメラCPU32はまた、検出された顔画像情報に符合する顔をカメラ処理回路22から出力された画像データに基づいて探索し、探索結果が非探知を示すとき要求元のスマートフォンへの画像データの転送処理を制限する。
(もっと読む)
撮像装置および撮像方法
【課題】データ容量が大幅に増大することなく書籍画像の湾曲歪を補正し歪の少ない画像が取得でき、且つ、ポータビリティに優れ、小型で低コストである撮像装置および撮像方法を提供すること。
【解決手段】撮像素子11と、該撮像素子11に被写体の像を結像させる撮影レンズ系2と、前記撮像素子11の信号から画像データを生成する画像生成手段12と、前記画像データを記録する記録手段と、前記被写体の距離を二次元方向で多点測距し測距データを取得する測距手段3と、前記被写体として書籍を撮影する書籍撮影モードが設定可能な撮影モード選択手段と、前記書籍撮影モードが選択されて得られた画像データを、前記測距手段3により取得した測距データに基づいて湾曲歪を補正する制御手段14と、を備えることを特徴とする。
(もっと読む)
カメラ姿勢算出装置
【課題】複数台の監視カメラの監視空間が什器等が設置された建物内、或いは建物内の廊下などの場合、各カメラの姿勢を校正する基準物体を設置するスペースを確保できない。
【解決手段】自己及び相互の鉛直下を撮像可能に設置された2台のカメラ2a,2bのそれぞれの鉛直下にマーカー7a,7bを配置する。視線方向算出部30は、例えば、カメラ2aについて当該カメラで撮像した画像における自己マーカー7a及び他方カメラ鉛直下の相手マーカー7bの位置座標を用いて当該カメラから各マーカーへの視線方向を算出する。姿勢算出部31は、自己マーカーへの視線方向から得られる鉛直方向と、相手マーカーへの視線方向から得られるカメラ2a,2b間の方位とを用いて世界座標系における各カメラの姿勢を算出する。
(もっと読む)
固体撮像装置及びカメラモジュール
【課題】カメラモジュールの小型化と高速なフォーカス調整を可能とし、高感度かつ高解像度で、色再現性の優れた画像の撮影を可能とする固体撮像装置及びカメラモジュールを提供すること。
【解決手段】実施形態によれば、固体撮像装置は、撮像処理回路20及びフォーカス駆動制御部を有する。撮像処理回路20は、輝度情報生成部42、視差量算出部43及び画像合成部48を有する。輝度情報生成部42は、特定の色成分についての第1輝度情報55を生成する。視差量算出部43は、第1輝度情報55と、第2輝度情報であるモノクロ画像データ51とを基に、視差量を算出する。画像合成部48は、色情報54と、第2輝度情報とを含む合成画像データ57を生成する。フォーカス駆動制御部は、視差量を用いて求められた被写体距離に応じてフォーカス駆動を制御する。
(もっと読む)
撮像装置、その制御方法及びプログラム
【課題】新たな欠陥画素が発生した後で、次の欠陥画素検出までの期間に撮影された画像に対しても欠陥画素補正を行えるようにする。
【解決手段】撮像素子により得られた画像データに基づいて欠陥画素を検出し、新規欠陥画素の情報、欠陥画素検出日時を記憶する。そして、記録媒体に記録された画像データの中から、撮影日時が前回の欠陥画素検出日時より新しい画像データを抽出し、当該画像データに対して、前記新規欠陥画素の情報に基づいて欠陥画素補正を行う。これにより、新たな欠陥画素が発生した後、次の欠陥画素検出までの期間に撮影された画像に対しても欠陥画素補正を行うことが可能である。
(もっと読む)
撮像装置及びその制御方法、並びにプログラム
【課題】必要以上に欠陥画素の補正を行うことなく、また補正されなかった欠陥画素を目立たないようにした撮像装置及びその制御方法、並びにプログラムを提供する。
【解決手段】撮像装置1は、欠陥画素の位置及びレベルから、設定情報により当該欠陥画素がある領域に設定された閾値と、前記欠陥画素のレベルとを比較することにより、当該欠陥画素を補正するか否かを決定する。そして、補正することが決定された欠陥画素を補正する。
(もっと読む)
撮像装置、撮像方法、およびファインダ装置
【課題】ファインダユニット全体を動かすことなく、撮影される画像をファインダでより正確に観察することを可能にすること。
【解決手段】第1の画像を取得する撮影用の第1の撮像素子と、前記第1の撮像素子に光を導く撮影光学系とは異なる光軸を持ち、ファインダで観察可能な光学像を結像するファインダ光学系と、前記ファインダで観察可能な光学像と同じ範囲の光学像から第2の画像を取得する第2の撮像素子と、前記第2の撮像素子の撮像範囲が前記第1の撮像素子の撮像範囲を包含するための制御を行う制御部と、前記第1の画像に対応する前記第2の画像内の領域を検出する検出部と、前記領域の検出結果に基づき生成される、前記第1の画像に対応する前記ファインダで観察可能な光学像内の領域を示す画像を、当該光学像に重畳して表示する表示部と、を備える撮像装置が提供される。
(もっと読む)
撮像装置および撮像方法
【課題】夜景などのように点光源が支配的な被写体であっても、精度よく自動焦点処理を行うことができる撮像装置および撮像方法を得る。
【解決手段】撮像レンズを介して取得された被写体像に応じた画像信号を出力する撮像素子と、撮像レンズを移動させるレンズ移動手段と、画像信号から得た画像データに応じて焦点を決定する自動焦点検出手段と、を有し、画像データに含まれる輝度成分によって被写体像が点光源被写体であるか否かを判定する点光源検出手段と、被写体像が点光源被写体であるとき撮像素子の駆動条件を変更する撮像素子駆動設定手段と、有する撮像装置による。
(もっと読む)
撮像装置、撮像装置の制御方法及びプログラム
【課題】撮影方向の設定を短時間に行うことができるようにする。
【解決手段】キャプチャされた画像データの輝度値を評価する処理を実行し、最も輝度値が高い画素位置、つまり画像中の最も明るい領域が画面の中央に位置するかどうかをチェックする。このチェックの結果、画面の中央ではない場合は、撮影された画像内で最も明るい領域(輝度値が高い画素位置)が画面の中央位置に来るようにカメラの撮影方向を変更する処理を実行し、画像中の最も明るい領域が画面の中央に位置するまで、撮像処理、輝度値の評価、及び撮影方向の変更を繰り返す。
(もっと読む)
キャリブレーションシステム、パラメータ取得装置、標識体、及び、パラメータ取得方法
【課題】設置パラメータを取得する精度を向上する。
【解決手段】キャリブレーションシステム10においては、第1標識体31〜34が、カメラ5で取得された画像中において略真円の像として表れる略楕円のマークMi,Meを含んでいる。車載装置2は、このようなマークMi,Meの略真円の像を含む画像をディスプレイに表示させ、ユーザはこの略真円の像の位置を指定する。そして、車載装置2は、指定されたマークMi,Meの像の位置に基づいて設置パラメータを導出する。マークMi,Meの略真円の像を含む画像が表示されるため、ユーザはマークMi,Meの像の位置を正確に指定することができる。このため、設置パラメータを取得する精度を向上できる。
(もっと読む)
焦点調節装置
【課題】所定量より大きい被写体像の大きさ変化の有無を判断し、被写体の動きに追従してピント合わせを行える自動焦点調節装置及び方法を提供する。
【解決手段】自動焦点調節装置は、被写体光を光電変換して得た電気信号の焦点検出領域に対応する電気信号からAF評価値を生成する手段113と、電気信号から所定被写体像を検出する手段116と、被写体像の光軸方向の距離変化の有無を判別する手段114と、AF評価値に基づきフォーカスレンズを駆動制御して焦点を調節する制御手段114を含む。制御手段は、判別手段の判別結果に応じて被写体像の光軸方向の距離変化に合わせてフォーカスレンズを駆動制御する際に被写体像の大きさ変化量が所定量より大きい場合には距離変化に対応させた追従駆動動作を駆動制御として行い、所定量より小さい場合には距離変化に合わせた追従駆動動作を制限する。所定量は撮影パラメータと被写体状況に応じて変化させる。
(もっと読む)
画像処理装置および方法、並びにプログラム
【課題】試料の形態変化を定量的に観察できるようにする。
【解決手段】検出部52は、時間の経過とともに形態が変化する試料18の観察画像から、試料18としての破骨前駆細胞の領域を検出する。重畳部53は、時刻の異なる観察画像上の破骨前駆細胞の領域を重ね合わせ、演算部54は、重ね合わされた破骨前駆細胞の領域の面積に基づいて破骨前駆細胞の形態変化の度合いを算出し、形態変化の度合いに基づいて破骨前駆細胞が分化したかを判定する。加工部55は、分化したかの判定結果に基づいて、観察画像上の分化した破骨前駆細胞(成熟破骨細胞)と、分化していない破骨前駆細胞とを異なる表示形式で表示させる。本発明は、共焦点顕微鏡を用いた観察システムに適用することができる。
(もっと読む)
画像取得装置
【課題】単独のカメラにてリアル画像と光スペクトル画像とを取得可能な画像取得装置を提供する。
【解決手段】光学特性変更部15と、対物レンズ47を含み、該対物レンズからの光を前記光学特性変更部へと導く光学系45と、前記光学特性変更部を介した光を受光する撮像素子52とを具備し、前記光学特性変更部は複数の分割部を有すると共に分割部の1つを選択的に光路に配置させる構成であり、前記分割部は前記光学系からの光から特定の波長を選択する第1領域と、前記光学系からの光の光学特性を変更させない第2領域とを有する。
(もっと読む)
電子カメラ
【構成】イメージセンサ16および56は、共通のシーンを表す画像を各々が出力する。CPU26は、イメージセンサ16および56の一部から出力された画像から既定条件を満足する部分画像を探索し、イメージセンサ16および56の他の一部の撮像条件を探索処理が実行された時点の撮像条件と異なる条件に調整する。CPU26はまた、調整処理によって注目されたイメージセンサから出力された画像から既定条件を満足する部分画像を探索する処理を調整処理に関連して実行し、探索処理によって探知された部分画像に注目してイメージセンサ16および56の少なくとも一部の撮像条件を調整する。
【効果】撮像性能の向上が図られる。
(もっと読む)
全焦点画像生成方法、全焦点画像生成装置、全焦点画像生成プログラム、被写体高さ情報取得方法、被写体高さ情報取得装置及び被写体高さ情報取得プログラム
【課題】焦点位置が異なる複数の撮像画像から画素位置ごとに焦点が合った画像及び高さ情報を、大域的な領域に亘って適切に焦点が合うように生成する。
【解決手段】焦点位置が異なる複数の画像を取得する(ステップS1)。各画像からグレースケール画像を取得する(ステップS5)。グレースケール画像にウェーブレット変換を施し、多重解像度画像を生成する(ステップS6〜S13)。多重解像度画像に基づいて焦点位置に関する確率分布を生成する(ステップS14)。確率分布に基づくコスト関数とペナルティ関数とを足し合わせた評価関数が最小になるような最適な焦点位置を、確率伝播法を用いて、画素位置ごとに近似的に算出する(ステップS17〜S20)。最適な焦点位置から、画素位置ごとに焦点が合った画像及び高さ情報を生成する(ステップS22)。
(もっと読む)
画像処理装置及び画像処理方法
【課題】適切に短時間でボケ修復を行うことのできる画像処理装置及び方法を提供する。
【解決手段】撮影レンズを介して入射した被写体光を光電変換する撮像部により得られた画像データに画像処理によってボケ修復を行う修復部と、撮影レンズに関する情報に基づいて修復部によるボケ修復が可能な被写体距離の範囲を設定する第1の設定部と、画像データの画像内の被写体距離の情報に基づいて、ボケ修復が可能な被写体距離の範囲よりも狭いボケ修復を行う被写体距離の範囲を設定する第2の設定部とを備え、修復部は、第2の設定部によって設定されたボケ修復を行う被写体距離の範囲において画像データのボケ修復を行う。
(もっと読む)
41 - 60 / 2,971
[ Back to top ]