
Fターム[5H303HH04]の内容
Fターム[5H303HH04]の下位に属するFターム
操作手段、伝動手段の位置検出 (155)
Fターム[5H303HH04]に分類される特許
1 - 20 / 24
制御指令値生成プログラム、制御指令値生成方法および制御指令値生成装置
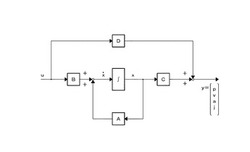
【課題】 一の入力指令値から複数の制御指令値を高精度かつ安定的に生成するとともにその際の演算負荷を低減することができる制御指令値生成プログラム、制御指令値生成方法および制御指令値生成装置を提供する。
【解決手段】 コンピュータを、所定の入力指令値から当該入力指令値のn階までの微分(n≧0)で表せるn+1個の制御指令値を、入力数が1であり出力数がn+1である状態方程式を用いて生成するn次のデジタルフィルタとして機能させる。
(もっと読む)
位置制御装置

【課題】簡素な構成で可動部材の位置を高精度に検出するとともに、高精度に停止位置の制御ができる位置制御装置を提供する。
【解決手段】直流電気モータ39〜42と、電気モータによって可動部材を移動させる移動手段2と、ブラシとコミュテータとの間の断続によって電気モータへの供給電流に発生するリップル成分を抽出してパルス化したリップルパルスを出力するパルス検出部38と、可動部材が移動されるときの現在位置を示す現在位置情報をリップルパルスに基づいて演算し記憶する現在位置情報記憶部44と、電気モータ39〜42に供給される電流が0となる前に可動部材が停止するように電流を低下させる電流制御装置45と、を備える。
(もっと読む)
同期制御装置及び画像形成装置
【課題】像担持体と中間転写体との間の同期誤差を低減して、色ずれ等の画像不良の発生を低減する。
【解決手段】像担持体と中間転写体とを同期制御する際、同期補償器44は像担持体の検出位置と中間転写体の検出位置との間の同期誤差に応じて像担持体及び中間転写体を駆動する際の第1及び第2のトルク補償量を求める。ドラム位置制御器42は像担持体の検出位置とその目標位置との偏差である第1の位置偏差に応じて第1のフィードバック量を生成する。ベルト位置制御器43は中間転写体の検出位置とその目標位置との偏差である第2の位置偏差に応じて第2のフィードバック量を生成する。加算器51は第1のトルク補償量と第1のフィードバック量とに応じて像担持体を駆動制御する。減算器50は第2のトルク補償量と第2のフィードバック量とに応じて中間転写体を駆動制御する。
(もっと読む)
フルクローズド位置制御装置
【課題】 数値制御機械のフルクローズド位置制御装置において、対象プラントの条件に関わらず、プラント変動に応じて、システムの安定性(振動抑制性を含む)と、高い指令追従性能及び負荷外乱抑制性能が両立するフルクローズド位置制御装置を提供する。
【解決手段】 フルクローズド位置制御装置は、位置指令値の時間微分である速度指令値と、位置指令値と対象プラントの負荷位置との位置偏差を増幅する位置偏差増幅器の出力と、を加算した結果から、対象プラントの負荷速度を減算して速度偏差を算出する加減算器3と、速度指令値と撓み速度補償値との加算値である速度補償値をモータ速度から減算する減算器2と、速度偏差と減算器の出力とを入力として、対象プラントへの制御入力を求めて出力する速度制御器1(Kr)と、を備える。
(もっと読む)
マーキング制御システム及びこれを用いてマーキングされた部材同士の位置合わせ方法
【課題】マーキングにより2つの部材をどのような位置、角度で合わせ、どのような位置からカメラにてパターンマッチングする場合でも、的確に互いの位置を合わせることができるマーキング制御システム及びこれを用いてマーキングされた部材同士の位置合わせ方法を提供する。
【解決手段】マークを第1及び第2の部材のそれぞれに付すためのマーキング機に備わるマーキング制御システム1であって、組立計画データベース2と、カメラ情報が格納されたカメラデータベース3とから情報を取得し、カメラから見た時のカメラ平面画像を導出する平面導出処理部8と、マーキング位置情報が格納されたマーキングデータベース4と、マークの形状が格納されたマークデータベース5とから、マークをカメラにてパターンマッチングできる形状に変形するためのマーク変形処理部9とを有し、変形マーク変換情報を、マーキング機7に備わるマーキング手段に伝達する。
(もっと読む)
アクチュエータ駆動式且つフィードフォワード制御式の太陽追尾システム
アクチュエータ駆動式且つフィードフォワード制御式の太陽追尾システムは、少なくとも1枚のソーラーパネルを支持するサブフレームと、サブフレームを支持する支柱と、サブフレームと支柱とを連結するリンク型連結機構とを備えている。リンク型連結機構は、第1枢軸と、第2枢軸と、ボディ部材とを含んでいる。リンク型連結機構の第1枢軸と第2枢軸とは、それらの延在方向が実質的に互いに直交しており、ボディ部材によって離隔されている。このシステムは更に、少なくとも2つの直動型アクチュエータと、それらアクチュエータとサブフレームとを連結する回転ジョイント型連結機構と、それらアクチュエータを駆動する駆動系とを備えている。このシステムは更に、フィードフォワード制御系を備えている。フィードフォワード制御系はコンピュータを含み、このコンピュータは、複数のデータ点を入力として用いて直動型アクチュエータの目標動作位置を算出し、そして、駆動系とコミュニケートして直動型アクチュエータを駆動する。このシステムは更に、フィードバック制御系を備えている。フィードバック制御系は、センサデバイスによって収集された情報をフィードフォワード制御系へ中継し、フィードフォワード制御系とフィードバック制御系とは統合された1つの制御系として機能する。 (もっと読む)
速度検出装置および位置検出装置および位置決め装置
【課題】安価で簡易な構成によりスライダの位置検出を安定して行うことができるとともに、設計の自由度の高い位置決め装置を実現する。
【解決手段】X軸方向に位置制御されるスライダ1と、このスライダ1と対向する面に磁極の歯が形成されてスライダ1と平面モータを構成するプラテン10とを有するとともに、
スライダ1のX軸方向の位置に応じた信号を出力するレゾルバ30と、スライダ1のX軸方向の加速度を検出する加速度センサ31とを備えた位置検出装置300を備え、
位置検出装置300がレゾルバ30と加速度センサ31の出力に基づいてスライダ1の位置を求めることを特徴とする位置決め装置。
(もっと読む)
位置決め装置
【課題】特定のエリアでは高い位置決め精度を確保しつつ、全体として比較的安価な位置決め装置を提供する。
【解決手段】 位置制御されるスライダ1と、このスライダ1と対向する面に磁極の歯が形成されてスライダ1と平面モータを構成するプラテン10とを備えた位置決め装置において、
スライダ1の位置を検出するレゾルバ30a〜30c(以下レゾルバ30とする。)と、
プラテン10の特定のエリアAにおけるスライダ1の位置をレゾルバ30よりも高い精度で検出するレーザ干渉計20a,20b(以下レーザ干渉計20とする。)と、
スライダ1の位置に応じてレゾルバ30またはレーザ干渉計20のいずれかの位置検出装置を選択する切替スイッチ100cと、
位置指令値および切替スイッチ100cで選択された位置検出装置で検出される位置検出値に基づいてスライダ1の位置制御を実行する位置制御部102と、
を備えたことを特徴とする位置決め装置。
(もっと読む)
非接触式変位制御装置
【課題】音圧によって制御対象物の振動を抑制し、あるいは発散させることを可能とすることである。
【解決手段】非接触式変位制御装置10は、ベース12と、ベース上を移動可能な2つの移動台14,16と、2つの移動台14,16のそれぞれに搭載された2つの超音波音源である第1音圧発生源20と第2音圧発生源24と、これらにそれぞれ個別に接続される超音波発生回路22,26と、2つの移動台14,16の移動制御と超音波発生回路22,26の作動制御とを行う制御部30を含んで構成される。制御部30は、制御対象物である振り子8に対し、第1音圧発生源20と、第2音圧発生源24とから定在波による音圧を与え、その差動音圧を制御して、振り子8の振動制御を行う。
(もっと読む)
位置又は速度制御装置
【課題】 モータと機械負荷間の結合剛性が十分でない動力伝達機構を含むフィードバック制御系の制御性能の向上を実現できる位置又は速度制御装置を提供する。
【解決手段】 減速器12を介してモータ10と接続された機械負荷11の速度を制御する速度制御装置の場合、負荷速度コントローラ16は、負荷速度指令値と負荷速度の算出値との差に基づいて負荷軸トルク指令値を算出し、算出された値を基にねじり角指令値θrefを出力する。そして、負荷速度コントローラのマイナーループに、ねじり角指令値とねじり角Δθの算出値との差に基づいてモータトルク指令値を出力するねじり角コントローラ17を備えた。
(もっと読む)
小型高精度位置決め機構、その制御方法及びそれを用いた高エネルギー粒子発生装置
【課題】従来のものと比較してより小型で、かつバックラッシによる誤差を防止して位置決め対象を正確に位置決めすることができる小型高精度位置決め機構、その制御方法及びそれを用いた高エネルギー粒子発生装置を提供する。
【解決手段】
制御部270は、直流モータ(DCモータ210)に対して前方の所定の停止位置に向かって位置決め対象を前進させる際には、位置決め対象を初期位置から停止位置を超えて前進させた後、後退させて位置決め対象が停止位置に達するまで直流モータを回転させる一方、直流モータ(DCモータ210)に対して後方の停止位置に向かって位置決め対象を後退させる際には、位置決め対象が停止位置に達するまで直流モータを回転させるように制御する。
(もっと読む)
位置制御装置と位置制御方法
【課題】 機械の位置によって振動周波数が変化する場合でも振動を抑制することができる位置制御装置と位置制御方法を提供する。
【解決手段】 フィードバック制御により速度指令とモータ速度信号を一致させるモータの速度制御部(13)と、フィードバック制御により位置指令とモータ位置信号を一致させるモータの位置制御部(12)を備えた位置制御装置において、トルク指令とモータ速度から制振信号を演算する制振信号演算部(18)と、モータ位置信号に基づいて制振信号演算部の比例補償器と積分補償器とハイパスフィルタとローパスフィルタのゲインを切換えるゲイン切換器(19)とを備えた。
(もっと読む)
位置検出方法および位置合わせ方法
【課題】矩形状の検出対象物の位置とその向き検出して基準位置への位置合わせを効率的に、しかも高精度に行うことのできる位置検出方法および位置合わせ方法を提供する。
【解決手段】検出対象物の一辺のエッジ位置をそれぞれ検出する第1および第2のラインセンサの出力から前記検出対象物の向きのずれ角を求め、求められた検出対象物のずれ角と前記第1〜第3のラインセンサの出力とから前記ずれ角を補正後における前記検出対象物の各軸方向へのずれ量を求める。そしてx軸およびy軸方向のずれ量X,Yとずれ角θとを3軸同時に制御する。
(もっと読む)
テーブル位置決め装置
【課題】高精度位置決めを迅速かつ安定して行なえるようにする。
【解決手段】 ボールねじ軸(リード1mm)を利用した全域回転駆動型でかつテーブルを最小1nmずつ移動可能で、3つの光学格子(明・暗線が2μm)を用い信号分割数を2000として1nm/1パルスの移動変位量検出信号を生成でき、オープンループ制御による高速回転とクローズドループ制御による中速回転および低速回転をこの順序で切換えて位置決めでき、低速回転中に発生した機械的振動に起因する見掛けモータ回転制御信号を無視可能とされている。
(もっと読む)
PID制御装置及びそのPID制御系の制御要素を設定する方法
【課題】PID制御装置において目標サーボ帯域に亘って高速高精度での位置決めを実現する制御要素の決定方法を提供することにある。
【解決手段】PID制御系の制御要素を設定する方法においては、制御対象の周波数応答特性が測定されてこの周波数応答特性に近似させたフィードバック制御系の2次遅れ系の伝達関数が特定される。制御対象を制御する制御器の伝達関数が比例、積分及び微分ゲイン係数を含む不完全微分型に設定され、制御器の伝達関数と前記制御対象との伝達関数の積で表される開ループ伝達関数が定められ、制御対象が有する共振特性を打ち消すように制御器の比例、積分及び微分ゲイン係数が求められ、制御器に設定される。
(もっと読む)
インパクト駆動アクチュエータ
【課題】 設置位置の調整の手間がなく簡単に移動対象物の位置を検知することができるインパクト駆動アクチュエータを提供する。
【解決手段】 インパクト駆動アクチュエータ100は、パルス電圧の印加により急峻な変形を起こし、衝撃的な慣性力を移動対象物21に与えて移動対象物21を移動させる積層型圧電素子110と、該圧電素子110を移動対象物21に接触させるエアシリンダ120と、圧電素子110と一体的に設けられて移動対象物21の位置を検知する接触式の変位センサ140とを有する。
(もっと読む)
XYステージ
【課題】 原点復帰時のスライダ部同士の衝突を防止し、レーザ干渉計のつなぎ箇所にて発生する累積検出誤差をキャンセルする機能を備えたXYステージを実現する。
【解決手段】 四辺形のプラテン上で2個のスライダ部を夫々2次元方向に位置制御するにXYステージにおいて、
前記四辺形の対角点位置又は一辺の両端位置に、前記スライダ部の夫々に対応する原点位置検出手段を設けた。
(もっと読む)
リニアアクチュエータ
【課題】小型の変位センサを設置することにより、小型で、かつ、位置決めできるリニアアクチュエータを提供する。
【解決手段】駆動モータ1により回転駆動するねじ部と、このねじ部に螺合されたナット部と、このナット部に取り付けられたスライダーとを備え、前記ねじ部の回転により前記ナット部とともに前記スライダーが直線的に移動するリニアアクチュエータにおいて、前記スライダーの両側面を拘束するガイド7と、このガイドの反スライダー側側壁に取り付けられた第1のアンテナ15と、この第1のアンテナに対向する反スライダー側側壁に取り付けられた第2のアンテナ16と、この第1と記第2のアンテナに挟持されるよう前記スライダーの両側壁に取り付けられた第3のアンテナ17とを備え、前記第1と第2のスライダーに対して前記第3のアンテナの位置が変化したときの静電容量の変化により前記スライダーの位置情報を検出する。
(もっと読む)
位置決め制御装置
【課題】状態フィードバック制御により駆動ローラまたは用紙搬送ベルトの高速且つ確実な位置決めが可能な位置決め制御装置を提供する。
【解決手段】この位置決め制御装置は、用紙搬送ベルト駆動機構の位置決め制御を行うものであり、モータと減速機構を含む駆動側慣性体と、用紙搬送ベルトとこれを支えるローラ群とを含む従動側慣性体とが柔結合される2慣性体近似で構成される機構の場合に、従動側慣性体の軸に角度検出器を設けて、この角度検出器の出力を基に用紙搬送機構を状態フィードバック制御するものである。
(もっと読む)
XYステージ
【課題】 ヨーイング、ピッチング及びローリング、コギング、速度制御におけるループゲイン、デッドタイム発生回路に起因する位置決め精度向上の障害要因に対応した補正手段を備えた、複数のスライダ部を有するXYステージを実現する。
【解決手段】 格子プラテン上のスライダ部を2次元方向に位置制御するXYステージにおいて、
独立に位置制御される複数のスライダ部を有し、これらスライダ部の夫々は、スライダ部をX軸方向及びY軸方向に位置制御する位置制御手段と、スライダ部のZ軸まわりのヨーイングを補正するヨーイング補正手段を備える。
(もっと読む)
1 - 20 / 24
[ Back to top ]