
Fターム[5H560DA14]の内容
無整流子電動機の制御 (40,007) | 位置検出(回転子) (3,428) | 位置検出器を用いずに位置検出するもの (1,239) | 誘起電圧、逆起電圧 (1,079) | 巻線に電流が流れているときのもの (548)
Fターム[5H560DA14]に分類される特許
1 - 20 / 548
電気角推定装置、モータシステム、電気角推定方法及びプログラム
モータ制御装置
モータ制御装置
コンベヤ駆動装置
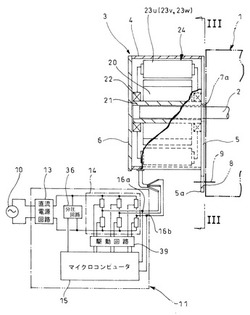
【課題】部品点数を削減して納期の短縮化とコストダウンを図り得ると共に、効率を高めて省エネルギ化とコンパクト化を図ることができ、更に外観向上をも図り得るコンベヤ駆動装置を提供する。
【解決手段】コンベヤ1の駆動軸2をダイレクトドライブ方式で回転駆動する永久磁石同期モータ3を備え、該永久磁石同期モータ3の各相の巻線に発生する誘起電圧に対して進み位相となるよう通電を行うことにより、該永久磁石同期モータ3が所定の回転数範囲内でトルク一定となるよう構成する。
(もっと読む)
回転電機制御装置

【課題】dq軸磁束干渉が生じるような回転電機でも、dq軸磁束干渉により、磁極方向の推定誤差が生じることを抑制できる回転電機制御装置が求められる。
【解決手段】回転電機に高周波電流を印加し、電圧指令に含まれる高周波成分に基づいてロータの磁極方向を推定し、前記回転電機を制御する回転電機制御装置であって、推定dq軸回転座標系における電流指令に高周波電流指令を重畳する高周波重畳部と、電圧指令を高周波座標系に座標変換した値が、高周波目標値に近づくように磁極方向の推定値を変化させる磁極方向調整部と、dq軸磁束干渉に関し、電流指令又はトルク指令に基づいて、磁束干渉推定誤差を算出して、座標変換に用いる高周波電流指令の位相又は高周波目標値を補正する定常推定誤差補正部と、を備える回転電機制御装置。
(もっと読む)
モータ制御装置
【課題】起動時間の短縮化が図れるモータ制御装置を提供する。
【解決手段】マイクロコンピュータ11は、速度比率指令値演算部21と、第1スイッチ22と、速度比率偏差演算部23と、速度制御部24と、電流比率指令値演算部25と、第2スイッチ26と、電流比率偏差演算部27と、q軸電流制御部28と、起動制御部43とを含んでいる。速度比率指令値演算部21は、予め設定されたロータの回転速度の最大値に対する速度指令値ω*の比率を、速度比率指令値として演算する。起動時には、第1スイッチ22は、速度比率指令値を第2スイッチ26に入力させ、第2スイッチ26は、第1スイッチ22から入力する速度比率指令値を、q軸電流比率指令値として電流比率偏差演算部27に入力させる。
(もっと読む)
モータ制御装置および電動パワーステアリング装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置を提供する。
【解決手段】d軸電流指令値設定部31、d軸電流偏差演算部32、ロータ角度制御部33、ロータ角度演算部34および速度演算部35から構成されるロータ角度推定手段によって、ロータ角度θが推定される。q軸電流指令値設定部21は、トルクセンサ1によって検出される操舵トルクおよび車速センサ2によって検出される車速に応じたモータトルクをモータ5から発生させるためのq軸電流指令値Iq*を設定する。d軸電流指令値設定部24は、d軸電流指令値Id*を設定する。q軸電流指令値Iq*と、d軸電流指令値Id*と、q軸電流検出値Iqと、d軸電流検出値Idと、推定されたロータ角度θとに基づいて、モータ5に供給される電流が制御される。
(もっと読む)
ブラシレスモータの駆動装置及び制御方法、ブラシレスファンモータの駆動装置及び制御方法
【課題】精度良くロータ停止位置を検出できるようにする。
【解決手段】ブラシレスモータのロータ停止位置を検出する際に、位置信号発生手段が、複数相の前記コイルに流す電流のあらかじめ定められた複数の通電パターンを指令する信号を発生させる。カウンタが、複数の前記通電パターンを指令する信号が出力されることでカウントアップを開始する。複数の通電パターンのうち、第1の通電パターンによる通電を指令し、コイルに流す電流をオフした後、該コイルに流れる回生電流がゼロになるまでに要する時間が経過したら、続く第2の通電パターンによる通電を指令する信号を出力する。
(もっと読む)
モータ制御装置
【課題】安定性を確保した位置センサレスの正弦波通電が可能なモータ制御装置を提供する。
【解決手段】モータ制御装置は、単相交流電源を入力とする整流回路と、整流回路と接続され、整流回路で得られた直流電力を三相交流電力に変換し、接続されるモータを駆動するインバータと、小容量のコンデンサと、インバータを制御する制御装置と、単相交流電源のゼロクロス点を検出するゼロクロス点検出回路とを備え、制御装置は、モータの回転数を設定する回転数設定手段と、モータの回転数を補正する第1の回転数補正手段と、第1の回転数補正手段とは異なる方式でモータの回転数を補正する第2の回転数補正手段と、ゼロクロス点の検出からの経過時間に応じて第1および第2の回転数補正手段の一方を選択する回転数補正選択手段とを含む。
(もっと読む)
モータ制御装置
【課題】大きなリプルを有する直流電源でモータをインバータ制御した場合、モータの回転が不安定となり、振動や騒音の増大や、最悪の場合、脱調や過電流停止を引き起こす。
【解決手段】モータ制御装置は、交流電源を直流出力電圧(Vdc)に変換して出力するコンバータ(3)と、直流出力電圧を交流電流に変換してモータ(1)を駆動するインバータ(2)と、モータの回転数指令を設定する回転数設定部(12)と、回転数指令に基づきインバータ(2)を制御するPWM信号生成部(15)と、加速禁止直流電圧(d)を設定する加速禁止直流電圧設定部(16)と、加速禁止直流電圧(d)および直流出力電圧(Vdc)に基づき、モータの加速制御信号(e)を生成する加速判定部(17)とを有し、加速制御信号(e)に基づき、回転数指令の変更を禁止する。
(もっと読む)
永久磁石形同期電動機の制御装置
【課題】過渡状態においても磁極位置検出回路を用いずに磁極位置と速度を正確に演算する。
【解決手段】回転子に同期した直交回転座標軸γδ軸を定義し、高周波電圧を前記γ軸基本波電圧指令値に加算してγ軸電圧指令値を印加する。検出した電動機電流δ軸成分微分値から前記高周波電圧と同じ周波数のフーリエ級数を演算し、位置推定誤差を演算する。
(もっと読む)
モータ制御装置
【課題】PWM制御における搬送波周期内で、2相の電流の高周波成分を確実に検出できるように3相のPWM信号パターンを生成可能なモータ制御装置を提供する。
【解決手段】実施形態によれば、電流検出素子をインバータ回路の直流側に接続して電流値に対応する信号を発生させ、PWM信号生成手段は、モータ磁極位置に追従するように3相のPWM信号パターンを生成する。電流検出手段が電流検出素子に発生した信号とPWM信号パターンとに基づいてモータの相電流を検出すると、PWM信号生成手段は、電流検出手段が、PWM信号の搬送波周期内における4点のタイミングで2相の電流をそれぞれ2回検出できるように3相のPWM信号パターンを生成する。更に電流微分手段が、前記2相のそれぞれについて2回検出した電流値の差を電流微分値として出力すると、磁極位置推定手段は、その電流微分値に基づいてモータの磁極位置を推定する。
(もっと読む)
永久磁石形同期電動機の制御装置
【課題】過渡状態においても磁極位置検出回路を用いずに磁極位置と速度を正確に演算する。
【解決手段】回転子に同期した直交回転座標軸γδ軸を定義し、高周波電圧を前記γ軸基本波電圧指令値に加算してγ軸電圧指令値を印加する。検出した電動機電流δ軸成分から前記高周波電圧と同じ周波数の余弦波成分のフーリエ級数を演算し、位置推定誤差を演算する。
(もっと読む)
モータ制御装置
【課題】単一の電流検出素子によりモータに供給される各相の電流を、リップルの発生に基づく騒音を抑制しつつ検出する。
【解決手段】実施形態によれば、電流検出素子をインバータ回路の直流側に接続して電流値に対応する信号を発生させ、PWM信号生成手段はモータの相電流に基づいてロータ位置を決定するとそのロータ位置に追従するように3相のPWM信号パターンを生成する。電流検出手段が、電流検出素子に発生した信号とPWM信号パターンとに基づいて、モータの相電流を検出する場合に、PWM信号生成手段は、電流検出手段がPWM信号の搬送波周期内で固定された2点のタイミングで2相の電流を検出可能となるように、3相のPWM信号パターンを生成し、電流判定手段が検出された3相電流の大小関係を判定し、電流値が最小を示す相の通電期間を最小通電期間とすると、PWM信号生成手段は各相のPWM信号パルスより最小通電期間を減じ、最小電流検出間隔の2倍を加えて補正する。
(もっと読む)
同期電動機の制御システム
【課題】
同期電動機を120度通電方式から180度通電方式に切り替える際に、切換速度より小さい速度付近で120通電方式のでは電流位相が進んで力率が悪化する問題があった。停止状態から中高速域に至る広い速度範囲において、トルクショックの小さいシームレス駆動を行うことができる同期電動機の制御システムを提供する。
【解決手段】
同期電動機を120度通電方式で起動し、その後、180度通電方式に切り替えて駆動する制御システムで、120度通電方式から180度通電方式へ切り替える際に、120度通電中の力率を改善する力率改善手段を設け、この力率の改善された120度通電方式から180度通電方式に切り替えて同期電動機を駆動する。
(もっと読む)
モータ駆動装置
【課題】負の界磁成分電流を最適な量だけ注入することができ、これによりモータをより高い速度で駆動できるモータ駆動装置を提供する。
【解決手段】モータ制御部は、推定ロータ速度ωmが設定値以上の場合に、その推定ロータ速度ωmの上昇に伴い増加し下降に伴い減少する負の界磁成分電流Idを加えて界磁成分電流の目標値Idrefを算出するとともに、その負の界磁成分電流Idの増減率を推定ロータ速度ωmの高さに応じて可変設定する。
(もっと読む)
モータ制御装置
【課題】停止位置によらず、かつ負荷特性が変化した場合にも安定にモータを駆動するモータ制御装置、およびそれを用いた駆動装置を提供する。
【解決手段】回転角度位置に関する情報を用いない同期運転モードと回転角度位置に関する情報を用いて駆動する位置センサレス運転モードとを備え、前記運転モードを駆動中に切り替えるモータ制御装置において、機械角1周期もしくは機械角1周期の整数倍で変動する周期トルク成分を推定する手段を備え、周期トルクの傾きがゼロ近傍または負になる期間に運転モードを切り替えることを特徴とするモータ制御装置。
(もっと読む)
DCブラシレスモータ
【課題】商用交流電源などのAC電源の直接入力が可能で、その商用電源の周波数に応じた速度で駆動が可能なAC入力のDCブラシレスモータを提供する。
【解決手段】本発明のAC入力のDCブラシレスモータは、駆動巻線と可動子とを少なくとも有するモータ部と、駆動巻線に駆動電力を供給するパワー素子と、駆動電力を制御するパワー制御部と、速度制御信号を発生する速度制御部と、商用交流電源が入力される端子部、および入力される商用交流電源の周波数を安定させる安定化部とを備え、パワー制御部は速度制御信号によりパワー素子の通電量を制御し、速度制御部は端子部に入力される商用交流電源の周波数に基づいて速度制御信号をパワー制御部に出力し、モータ部とパワー素子とパワー制御部と速度制御部とを少なくとも内蔵して、端子部への商用交流電源の接続によって商用電源周波数に応じた速度で駆動される。
(もっと読む)
インバータ装置
【課題】 指令速度や負荷にかかわらず、モータのロックを的確に検出できる信頼性にすぐれたインバータ装置を提供する。
【解決手段】 モータの起動の開始から予め定めた一定時間内で、かつ推定回転速度が予め定めた一定値に達しないうちに、モータ電流が予め定めた設定値以上に上昇したとき、モータがロックしていると判定する。
(もっと読む)
永久磁石同期電動機の初期磁極位置調整装置
【課題】インバータの出力電圧を検出しなくても誘起電圧と磁極位置検出信号との位相差を検出し、これを補正可能とした初期磁極位置調整装置を提供する。
【解決手段】インバータにより駆動される永久磁石同期電動機の起動時に、前記電動機の誘導起電力と磁極位置センサによる磁極位置検出信号との位相差を推定し、この位相差により補正した前記磁極位置検出信号を用いて前記インバータを制御するための初期磁極位置調整装置において、電動機の固定子巻線を流れる電流を検出する手段と、検出した電流を用いて前記位相差を推定する手段と、推定した位相差を用いて前記磁極位置検出信号を補正する手段と、備え、位相差推定手段302は、電動機200を空転させた状態でインバータ101のスイッチング素子を制御して電動機200の固定子巻線を短絡させ、無負荷誘導起電力によって流れる巻線電流から前記位相差を推定する。
(もっと読む)
1 - 20 / 548
[ Back to top ]