
Fターム[5H560JJ01]の内容
無整流子電動機の制御 (40,007) | 保護、補償、監視、表示 (1,472) | 保護 (1,068)
Fターム[5H560JJ01]の下位に属するFターム
過電流 (246)
過電圧 (97)
過負荷 (53)
過速度 (23)
過熱 (175)
異常低速(拘束状態等) (83)
電源電圧変動 (43)
瞬時停電 (14)
アームの短絡防止
転流失敗 (20)
騒音防止 (87)
電気的ノイズ防止 (73)
Fターム[5H560JJ01]に分類される特許
1 - 20 / 154
電動工具
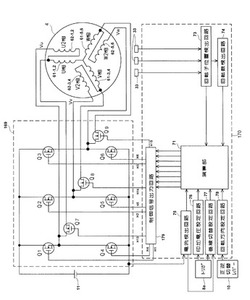
【課題】巻線仕様を変更して2種類以上のモータ特性を得るモータを備える場合に、各巻線仕様のモータ特性に対して中間的な特性を経て前記巻線仕様の切替えを行うことで、切替えた瞬間に生じる急激なトルク変化や回転数変化を回避する。
【解決手段】永久磁石回転子と、固定子4と、固定子の各ティース毎に2つのコイルを持つ巻線を有するモータと、これによって駆動される先端工具と、前記巻線へ駆動電力を供給するインバータ回路169と、これを制御する制御部170と、前記モータの起動及び回転の制御を行うためのスイッチとを備え、前記巻線は前記ティース毎に2つのコイルを有することで、2種の巻線仕様を有するものであり、制御部170は、前記モータに流れる電流に応じて2つのコイルへの通電を変化させることにより各巻線仕様のモータ特性に対して中間的な特性を経て前記巻線仕様の切替えを行う。
(もっと読む)
電動機の制御装置

【課題】電動機の状態に係るパラメータの補正、又は、電動機若しくは電動機に係るパラメータを検出する手段の状態の判定を高精度に行うことができる電動機の制御装置を提供すること。
【解決手段】制御装置は、互いの回転子が動力伝達可能に接続される2つの電動機と、回転子の回転状態に伴い変化する、電動機の状態又は電動機に付属する補機の状態を検出する状態検出部と、2つの電動機の各動作を制御する制御部とを備える。制御部は、2つの電動機の一方の電動機である第1の電動機を駆動制御し、第1の電動機が駆動することで2つの電動機の他方の電動機である第2の電動機が回転動作しているときに状態検出部が検出した、第2の電動機の状態又は第2の電動機に付属する補機の状態に基づいて、第2の電動機の状態に係るパラメータの補正、又は、第2の電動機の状態若しくは第2の電動機に付属する補機の状態を検出する状態検出部の状態の判定を行う。
(もっと読む)
モータ制御装置
【課題】回転センサに故障が生じたときでも、モータの駆動を継続することができるモータ制御装置を提供する。
【解決手段】センサ故障判定部25は、レゾルバ2の故障の有無を判定する。レゾルバ2に故障が生じていない通常時は、レゾルバ2の出力を用いて、モータ1が駆動される。レゾルバ2の故障時には、位置推定部60が演算する推定回転位置を用いて、センサレス制御によって、モータ1が駆動される。また、センサレス制御が行われる場合において、低速域用位置推定部61によってロータ回転位置の推定が行われる低速域では、目標電流上限値が、一定以上のロータ位置推定精度が得られる値に制限される。
(もっと読む)
モータ駆動装置及びモータの駆動制御方法
【課題】安価な回路構成で一般的な制御方法による起動を行うとともに、エラー発生時には適切なリカバリー動作を実現する。
【解決手段】モータの駆動開始時には、第1の駆動手段によってモータを駆動した後、第2の駆動手段によってモータを駆動するように、第1の駆動手段と第2の駆動手段とを切り替える制御手段と、を有し、第1の駆動手段は、所定の駆動周波数でオープンループ制御をしている際に、判定手段が検出器からの出力が所定の範囲外であると判定した場合、所定の駆動周波数よりも低い駆動周波数でモータを駆動し、第2の駆動手段は、所定の加速度でフィードバック制御をしている際に、判定手段が検出器からの出力が所定の範囲外であると判定した場合、所定の加速度よりも低い加速度でモータを駆動する。
(もっと読む)
モータ制御装置及びこれを備える電動パワーステアリング装置。
【課題】三相ブラシレスモータを二相駆動する際に効率よく駆動電圧をモータの正常相に印加することのできるモータ制御装置及びこれを備える電動パワーステアリング装置を提供する。
【解決手段】信号出力部は正常相を二相駆動するに際し、ロータの回転に伴って各正常相に発生する誘起電圧と相似する正弦波の駆動電圧を誘起電圧に追従する態様で各正常相に対し印加すべく制御信号の生成態様を変更する制御信号変更処理を実行する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】高い静粛性を確保しつつ、より安定的にレゾルバレス制御を実行することのできるモータ制御装置を提供すること。
【解決手段】F/B制御部47は、F/Bゲイン可変制御部80が演算するフィードバックゲインを用いて、トルク偏差Δτに基づくトルクフィードバック制御を実行することにより第1変化成分dθτを演算する。また、F/Bゲイン可変制御部80は、第1変化成分dθτを加算角θaとする「第1の演算モード」、及び第1変化成分dθτを推定モータ回転角速度ωm_eにより補正した値を加算角θaとする「第2の演算モード」の各演算モードに応じて、二種類の異なるフィードバックゲインK1,K2を演算する。そして、第1の演算モードに用いるフィードバックゲインK1は、第2の演算モードに用いるフィードバックゲインK2との比較において、より応答性が高くなるように設定される。
(もっと読む)
モータ制御装置及び車両用操舵装置
【課題】モータの駆動時においても、相開放スイッチのオープン故障を検出することのできるモータ制御装置及び車両用操舵装置を提供する。
【解決手段】異常検出部は、モータ21と駆動回路32との間で一方向への通電が可能、且つモータ21が高速回転していない状態で、判定対象となる特定相の相誘起電圧値が継続して異常判定閾値以下となった場合に、該特定相のリレーFETにオープン故障が発生したと判定するようにした。
(もっと読む)
駆動装置および車両
【課題】モータを良好に駆動するのに必要な電圧センサに検出誤差がある異常を判定する。
【解決手段】モータのトルク指令Tm*に基づいてPWM制御モードと矩形波制御モードとのうちいずれかの制御モードでインバータを制御するものにおいて、矩形波制御モードは、電圧センサにより検出された駆動電圧系の電圧VHとモータの回転数Nmとに基づいて電圧位相上限θlimを設定すると共に、設定した電圧位相上限θlimを用いてトルク指令Tm*に基づいて電圧位相指令θ*を設定して矩形波信号を出力する制御モードであり、インバータの制御モードCmの過変調制御モードから矩形波制御モードへの切り替え直前の過変調制御モードにおけるモータの電圧位相θovmが切り替え直後の矩形波制御モードで設定すべき電圧位相上限θlimより大きい場合には(S310)、電圧センサに検出誤差があるセンサ異常と判定する(S330)。
(もっと読む)
車両用操舵装置
【課題】三相ブラシレスモータの駆動回路内の1つのスイッチング素子が短絡故障した場合に、短絡故障が発生したスイッチング素子を特定することが可能となる車両用操舵装置を提供する。
【解決手段】短絡故障したFETがローサイドFETであると特定された場合には、運転者による操舵が行なわれたときに、三相の各相の相電圧最大値を検出し、検出された各相の相電圧最大値を比較することにより、短絡故障相を特定する。一方、短絡故障したFETがハイサイドFETであると特定された場合には、運転者による操舵が行なわれたときに、三相の各相の相電圧最小値を検出し、検出された各相の相電圧最小値を比較することにより、短絡故障相を特定する。
(もっと読む)
車両用操舵装置
【課題】代替モータ回転角の検出に用いる回転角センサの分解能をモータ回転角に換算した値が90°〜180°の範囲内にある場合であっても、安定的に代替モータ回転角を用いたモータ制御を実行することのできる車両用操舵装置を提供すること。
【解決手段】マイコンは、モータ回転角センサにより検出されるモータ回転角に異常が検出された場合には、当該モータ回転角に代えて、ステアリングセンサの検出値に基づく代替モータ回転角を用いた代替制御を実行する。そして、マイコンは、代替制御に基づき換算分解能Δθ0に対応する位相遅れが生じたq軸電流指令値Iq*のq軸電流成分(第1成分Iq1)を打ち消すd軸電流指令値Id*を演算する。
(もっと読む)
電動パワーステアリング装置
【課題】3相電動モータで1相に異常が発生したときに、操舵フィーリングを悪化させることなく、残りの2相を用いてモータ駆動を継続できる電動パワーステアリング装置を提供する。
【解決手段】異常検出手段で各相コイルのうちの1相の駆動系統に通電異常を検出したとき、異常時モータ指令値算出手段34で、操舵補助電流指令値Irefに基づいて残りの2相のコイルを使用する異常時相電流指令値を算出し、その異常時相電流指令値に基づいて3相電動モータ12を駆動する。その際、操舵トルク及び前記3相電動モータ12で発生する操舵補助トルクの和と外力との釣合い時に、前記異常時相電流指令値を低下させる電流指令値補正手段を備えている。
(もっと読む)
モータ制御装置
【課題】処理装置の負担を軽減するとともに、位置センサの半故障状態やノイズによる外乱がある場合でも位置センサの故障を検出することができる、信頼性の高いモータ制御装置を提供すること。
【解決手段】本発明のモータ制御装置は、モータ巻線を有するステータ30と、N極およびS極の永久磁石を有するロータ31と、ロータ31の永久磁石のN極とS極の切換りを検出して位置センサ信号を出力する複数の位置センサ8と、複数の位置センサ信号を基にロータを回転させる駆動信号を出力するインバータ制御装置6と、複数の位置センサ信号の切り替わり回数を計測するセンサ信号カウント装置7とを備え、複数の位置センサ信号のうち少なくとも何れか一つの位置センサ信号の切り替わり回数が所定の回数以下の時に、モータを停止させる。
(もっと読む)
モータ制御装置及び車両用操舵装置
【課題】その目的は、モータ回転角速度を判定条件に加えることなく、精度良く通電不良を検出することのできるモータ制御装置及び車両用操舵装置を提供する。
【解決手段】通電不良検出部71は、相電流値が所定電流値以下であり、且つ電源電圧Vpsが所定電圧値以上である場合に、連続してDUTY指令値が所定電流値に対応する所定範囲の上限値以上であるという第1の判定条件、及び連続してDUTY指令値が下限値以下であるという第2の判定条件を満たすか否かを判定する。そして、通電不良検出部71は、第1の判定条件を満たす状態が継続する時間である第1の継続時間と、第2の判定条件を満たす状態が継続する時間である第2の継続時間とをそれぞれ計測し、第1又は第2の継続時間が、高速回転時におけるモータ21の回転周期に基づく判定時間を超えた場合に、通電不良が発生したと判定するようにした。
(もっと読む)
電動パワーステアリング装置および禁止方法
【課題】モータの回転角度を正確に検出することができない状態でモータにより操舵補助力が与えられることを抑制する技術を提供する。
【解決手段】ステアリングホイールに操舵補助力を与える電動モータと、電動モータの回転角度に応じた信号を出力するレゾルバと、レゾルバからの出力値に基づいて電動モータの回転角度を算出するモータ角度算出部と、モータ角度算出部が算出した算出回転角度に基づいて電動モータへの目標電流を設定し、電動モータの駆動を制御する制御装置と、を備え、制御装置は、起動時に、電動モータの実際の回転角度と、レゾルバからの出力値が示す回転角度とが所定の位相差とならない異常が発生しているか否かを診断し、異常が発生している場合には電動モータの駆動を禁止する。
(もっと読む)
異常検出装置及びモータ制御装置
【課題】同期モータが静止状態にある間に、同期モータの回転子の電気角を測定するセンサの異常を検出する。
【解決手段】異常検出装置は、複数のホールセンサの出力状態から同期モータ31の回転子の電気角を測定する第1測定部70と、ホールセンサとは異なる方法で電気角を測定する第2測定部(72、46、48)と、同期モータ31が静止状態にある時に、第2測定部(72、46、48)で測定した電気角から複数のホールセンサの出力状態を推定し、この推定結果と第1測定部70で測定した出力状態とを比較することにより、第1測定部70が出力する電気角に異常があることを検出する異常検出処理を行う異常検出部48と、を備える。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】モータ制御の安定性を好適に維持しつつ、効果的にモータ電流を抑制することのできるモータ制御装置を提供すること。
【解決手段】低減時間調整部は、「負の値」を有するγ軸電流増減値を積算制御部に出力してγ軸電流指令値Iγ**(Iγ*)の低減を許可した時点から、所定時間t_thの経過をもって、新たなγ軸電流増減値の積算によるγ軸電流指令値Iγ**の低減を許可する。そして、低減時間調整部は、γ軸電流指令値Iγ**に基づいて、当該γ軸電流指令値Iγ**の低減調整処理に用いる上記の所定時間t_thを変更する。
(もっと読む)
電動パワーステアリング装置
【課題】センサレス制御を行う場合の電気角の推定精度を向上させる。
【解決手段】電気角推定部110は、操舵トルクTrによりモータの第1推定回転方向d1を推定する第1回転方向推定部111と、誘起電圧ベクトルの移動方向からモータの第2推定回転方向d2を推定する第2回転方向推定部114と、第1推定回転方向d1と第2推定回転方向d2とを選択的に切り替える回転方向修正部115とを備える。回転方向修正部115は、第1推定回転方向d1と第2推定回転方向d2とが相違する場合、誘起電圧ベクトルの向く方向から決まる第2推定電気角と、モータ制御で使用している推定電気角θebとが一致したタイミングで、最終推定回転方向dxを第2推定回転方向d2に切り替える。
(もっと読む)
電動パワーステアリング装置
【課題】部品点数の増加やコストアップを抑制した簡素な構成のモータ回転角検出手段を使用して運転者に不快感を与えることを抑制する。
【解決手段】運転者の前記操舵系に対する操舵量に応じた前記電動モータの相対角度情報を算出するモータ相対角度情報算出部48a〜48cと、該モータ相対角度情報算出部が相対角度情報を得られない状態となることを防止して常時相対角度情報の生成を可能とする相対角度情報補完部48eとを有するモータ相対角度検出手段48を備えている。前記相対角度情報補完部は、相対角速度を検出し、検出した相対角速度が少なくとも零近傍の不感帯内となったとき、前記モータ相対角度検出手段により相対角度情報が得られるように前記相対角速度に所定周期毎に符号を変更するオフセット値を加算する相対角速度オフセット処理を行う。
(もっと読む)
電動パワーステアリング装置
【課題】モータに負荷トルクが印加された状態でモータ電流が極小化する状況を回避して、モータ制御の安定性を好適に維持することのできる電動パワーステアリング装置を提供すること。
【解決手段】電流指令値演算部61は、演算周期毎に、目標操舵トルクτ*と実際の操舵トルク(τ)との間のトルク偏差Δτに基づいてγ軸電流増減値ηを演算するγ軸電流増減値演算部71と、当該γ軸電流増減値ηを積算する積算制御部72とを備える。そして、電流指令値演算部61は、そのγ軸電流増減値ηの積算値をγ軸電流指令値Iγ*とする。また、電流指令値演算部61は、γ軸電流増減値ηを補正する増減値調整演算部73を備えるとともに、同増減値調整演算部73は、車両が直進状態にあるか否かを判定する。そして、増減値調整演算部73は、車両が非直進状態にあると判定した場合には、γ軸電流増減値ηを「0」に補正して積算制御部72に出力する。
(もっと読む)
モータ制御装置、および、これを用いた電動パワーステアリング装置
【課題】回転角検出手段を用いることなくモータを駆動し、このときのモータの巻線の異常を確実に検出できるモータ制御装置および電動パワーステアリング装置を提供する。
【解決手段】マイコン30は、第1駆動手段として機能し、トルクセンサ82により検出した操舵トルクに基づき加算角を演算し、当該演算により導出した加算角に基づきモータ10を制御する。マイコン30は、演算により導出した加算角に基づきモータ10を制御しているとき、第1異常検出手段として機能し、前記加算角、電流センサ81により検出した電流、および、インバータ部20に供給される第1制御信号(PWM制御信号)の値に基づき、モータ10の巻線の異常を検出する。
(もっと読む)
1 - 20 / 154
[ Back to top ]