
国際特許分類[B62D5/04]の内容
処理操作;運輸 (1,245,546) | 鉄道以外の路面車両 (62,921) | 自動車;付随車 (46,083) | 動力補助または動力駆動される操向 (7,105) | 電気的なもの,例.操向伝動装置に,連結され,またはその一部を形成する電気サーボモータを用いるもの (5,655)
国際特許分類[B62D5/04]に分類される特許
21 - 30 / 5,655
操舵制御装置
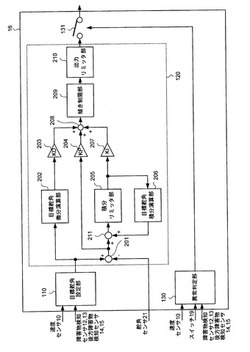
【課題】操舵輪の振動を防止できる操舵制御装置を提供する。
【解決手段】制御部(16)は、操舵輪(W)の操舵角の目標舵角を設定する目標舵角設定部(110)と、操舵輪(W)の実舵角を検出する実舵角検出部(21)と、目標舵角設定部(110)によって設定された目標舵角と、実舵角検出部によって検出された実舵角との偏差に基づいて算出される操舵部(2)の動作量を制御する操舵制御値を操舵部(2)に出力する操舵制御値演算部(120)と、操舵制御値演算部(120)によって算出される所定時間当たりの操舵制御値の変化を制限する傾き制限部(209)と、を備える。
(もっと読む)
磁歪式トルクセンサ、この磁歪式トルクセンサを搭載した電動アシスト自転車及び電動パワーステアリング装置

【課題】検出精度の高い磁歪式トルクセンサを提供することを課題とする。
【解決手段】回転軸に形成された磁歪部と、この磁歪部の外周を囲うよう配置されるボビンと、このボビンに巻かれて磁歪部の磁気特性の変化を検出するコイルとからなる磁歪式トルクセンサにおいて、ボビンは、磁歪部に接触した状態で、磁歪部に対して相対回転可能に嵌合されている。
【効果】ボビンが磁歪部に接触しているため、コイルを磁歪部の近傍に配置することができる。コイルとボビンとが近いため、コイル又はボビンに生じた温度変化が素早く他方の部材に伝わる。素早く伝えることで、コイルと磁歪部との間の温度差を素早く補正する。素早く補正することで、磁歪式トルクセンサの高い検出精度を確保することができる。
(もっと読む)
電動パワーステアリング制御装置
【課題】運転者の意思を適切に反映したアシスト制御を可能にする
【解決手段】EPSシステム1では、目標アシストトルク演算部20が、トルクセンサにて検出された操舵トルクTsに基づき、操舵トルクに応じた値の目標アシストトルクを示す目標電流を演算し、モータ駆動回路50が、演算された目標電流に基づいてモータ6を駆動させる。また、操舵角センサが操舵角θsを検出するとともに、微分器62が操舵角速度ωsを演算し、さらに操舵状態量演算部22が、操舵角θsと操舵角速度ωsとに基づいて、操舵状態量を演算する。そして目標アシストトルク演算部20は、演算された操舵状態量に基づき、目標アシストトルクを示す目標電流を変更する。したがって、操舵トルクTsだけではなく操舵角速度ωsによっても目標アシストトルクを変更することができる。
(もっと読む)
電動パワーステアリング装置
【課題】減速歯車機構を収容するギヤボックスが軽量で信頼性が高い電動パワーステアリング装置を提供する。
【解決手段】電動パワーステアリング装置は、減速歯車機構30を収容するハウジング部材33Aと、ハウジング部材33Aの開口部を覆うカバー部材33Bとが、ボルト33C及びナットにより締結され一体化されたギヤボックス33を備えている。このハウジング部材33A及びカバー部材33Bは、ボルト33Cが挿通されるボルト穴37を有する金属製の芯金36A,36Bをインサートとした樹脂材料のインサート成形によって製造されたものである。この樹脂材料は、気泡径が1μm以上50μm以下の気泡を有する発泡プラスチックを含有する材料である。
(もっと読む)
インホイールモータ車用転舵装置
【課題】転舵アクチュエータを用いて、アッパアームに設けた上下方向の転舵軸周りに車輪を回転させるインホイールモータ車用転舵装置において、転舵の際の抵抗を小さくする。
【解決手段】車両のアッパアームに設けた上下方向の転舵軸20周りに転舵手段33を備え、前記転舵手段33は、転舵アクチュエータ10の動作によりホイールwを前記転舵軸20周りに回転させて転舵する機能を有し、前記転舵アクチュエータ10の動作は、前記転舵手段33とは別に設けた操舵入力装置31からの入力信号に基づき制御手段32が制御し、前記制御手段32は、前記ホイールwが転舵する際に前記入力信号に基づいて、そのホイールwに設けた制動手段35の制動を解除又は弛緩する制御を行うインホイールモータ車用転舵装置とした。
(もっと読む)
電動パワーステアリング装置
【課題】加速度センサをタイロッドに比べて動きの小さいラックハウジングに取り付けることができるとともに、加速度センサの出力信号からタイロッドの加速度を推定することができるようになる電動パワーステアリング装置を提供する。
【解決手段】ラックハウジングに加速度センサ30が取り付けられている。加速度センサ30はラックハウジング加速度を検出する。位相進み補償処理部52Aは、タイロッド加速度に対するラックハウジング加速度の位相遅れ分だけ、ラックハウジング加速度の位相を進めるための位相進み補償処理を行なう。ゲイン補正処理部52Bは、タイロッド加速度に対するラックハウジング加速度のゲイン減少分だけ、ラックハウジング加速度のゲインを増加させるためのゲイン補正処理を行なう。
(もっと読む)
車両用操舵装置
【課題】転舵輪側からタイロッドに入力する高周波振動を新規な方法で推定して操作部材に伝達することができ、操舵感が向上する車両用操舵装置を提供する。
【解決手段】ラックハウジング18に加速度センサ30が取り付けられている。FFT処理部52Aは、加速度センサ30の出力信号を、時間領域信号から周波数領域信号に変換する。逆入力振動成分抽出部52Bは、FFT処理部52Aによって得られた周波数領域信号から、周波数fが所定範囲内(fL≦f≦fH(fH>fL))にあり、かつパワー密度ρが所定範囲内(ρL≦f≦ρH(ρH>ρL))にある信号を抽出する。IFFT処理部52Cは、逆入力振動成分抽出部52Bによって抽出された周波数領域信号を時間領域信号(逆入力振動推定値)に変換する。
(もっと読む)
電動式パワーステアリング装置
【課題】スプライン係合部で、必要な隙間(バックラッシュ)を確保しつつ、この隙間の存在に起因する、回転方向のがたつき(相対回転)に伴う異音(歯打ち音)の発生を、長期に亙り十分に防止できる構造を実現する。
【解決手段】スプライン孔11とスプライン軸部12とのスプライン係合部から軸方向に外れた位置に、弾性部材19を設ける。この弾性部材19を、電動モータ7の出力軸10に設けた各出力軸側突出部18、18と、ウォーム8側(抑え部材16)に設けた各ウォーム側突出部17、17とにそれぞれ係合させた状態で設ける。又、この状態で、上記出力軸10と上記ウォーム8との間に相対回転に対する抵抗力を付与する方向に弾性変形させる。
(もっと読む)
車両操向制御システム及びこれに対する電流供給方法
【課題】電磁クラッチを利用した車両操向装置、これに電流を供給する車両操向制御システム、及びクラッチプレートが磁化されることを防止する電流供給方法を提供する。
【解決手段】モータ12の動力をモータクラッチ110を利用して動力伝達部22及び可変操向部30の何れか一方に選択的に伝達する第1切換部100と、可変操向部30に伝達されたモータ12の動力を、モータクラッチ110を利用してチルト装置40及びテレスコピック装置50の何れか一方に伝達する第2切換部200と、操向ハンドルの操作を補助する動力伝達部20と、チルト装置40及びテレスコピック装置50を有する可変操向部30と、モータ12及びモータクラッチ110の作動を制御する制御部400と、を有し、制御部400は、モータクラッチ110の電磁石を作動させる時、前回にモータクラッチ110の電磁石に供給した電流の極と異なる極の電流を供給することを特徴とする。
(もっと読む)
電動パワーステアリング装置
【課題】1シャント式電流検出回路でモータ各相電流の検出を行うと共に、電流検出回路の故障(異常)を簡易な構成で確実に行い、安全性を高めた電動パワーステアリング装置を提供する。
【解決手段】インバータに接続された1つのシャント抵抗と、シャント抵抗の両端に正方向に接続され、モータの相電流を検出してアシスト制御の制御用モータ電流検出値とする制御用モータ電流検出回路と、シャント抵抗の両端に逆方向に接続され、制御用モータ電流検出回路の故障を検出するための診断用モータ電流検出回路とを具備し、1シャント式でモータの各相電流を検出してアシスト制御を行うと共に、シャント抵抗の両端電圧を増幅する回路を2系統とする。
(もっと読む)
21 - 30 / 5,655
[ Back to top ]