
国際特許分類[B62D5/04]の内容
処理操作;運輸 (1,245,546) | 鉄道以外の路面車両 (62,921) | 自動車;付随車 (46,083) | 動力補助または動力駆動される操向 (7,105) | 電気的なもの,例.操向伝動装置に,連結され,またはその一部を形成する電気サーボモータを用いるもの (5,655)
国際特許分類[B62D5/04]に分類される特許
61 - 70 / 5,655
操舵装置
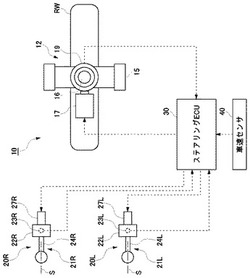
【課題】車速センサがフェールした場合であっても、操作性および操縦安定性の低下を抑制する。
【解決手段】操舵装置10は、右側操舵入力部20Rと、左側操舵入力部20Lと、車速センサ40と、右側操舵入力部20Rおよび左側操舵入力部20Lの少なくとも一方の操舵角に応じて操舵輪RWを転舵する転舵機構12と、ステアリングECU30により検出された車速に基づいて、右側操舵入力部20Rおよび左側操舵入力部20Lの少なくとも一方の操舵角に対する操舵輪の転舵角の比である舵角比を設定するステアリングECU30とを備える。ステアリングECU30は、車速センサ40がフェールした場合、右側操舵入力部20Rの操舵角に対する操舵輪RWの転舵角の比である第1舵角比と、左側操舵入力部20Lの操舵角に対する操舵輪RWの転舵角の比である第2舵角比とを異なる値に設定する。
(もっと読む)
操舵装置

【課題】簡易且つ適切に旋回モードを移行させる。
【解決手段】操舵装置において、転舵機構は、前二輪および後二輪を有する車両10における前二輪および後二輪の各々をステアリング32の操舵に基づいて転舵する。駆動機構は、前二輪および後二輪の各々を個別に駆動する。転舵機構および駆動機構は、ステアリング32の操舵量が増加する過程において、前二輪を同位相に転舵する通常旋回モードから、前二輪を同位相に転舵するとともに後二輪の旋回外輪に前進方向の駆動力を与え後二輪の旋回内輪に後進方向への駆動力を与える小回り旋回モードを介して、後二輪を逆位相に転舵する信地旋回モードに移行させる。転舵機構は、信地旋回モードにおいて、前二輪の旋回内輪を直進方向に戻すよう転舵する。駆動機構は、信地旋回モードにおいて、前二輪の旋回内輪に後進方向の駆動力を与える。
(もっと読む)
電動パワーステアリング装置用ギヤ
【課題】電動パワーステアリング装置に使用される減速機構用のギヤにおいて、ギヤの静音性を確保すると共に、寸法安定性ならびに、耐摩耗性を備える樹脂製ギヤを提供する。
【解決手段】金属製の芯管の外周に、アラミド粒子を10〜50質量%含有する樹脂組成物からなり、その外周部にギヤ歯が形成された樹脂部を一体化した、ギヤを形成することにより、静音性を有しながら、寸法安定性ならびに耐摩耗性を有する樹脂製ギヤを得ることが出来る。
(もっと読む)
回転角検出装置、及びトルクセンサ
【課題】回転体の多回転の絶対回転角を検出することが可能でありながらも、構造の簡素化を図ることのできるトルクセンサを提供する。
【解決手段】このトルクセンサ14では、第1のレゾルバ40を通じて検出されるインプットシャフト20の回転角度と、第2のレゾルバ50を通じて検出されるロアシャフト21の回転角度との差分値に基づいてステアリングホイールに付与された操舵トルクを演算する。ここでは、インプットシャフト20と一体となって回転する太陽歯車61、磁性体により形成されて太陽歯車61の周囲を公転する遊星歯車63、及び遊星歯車63が噛合される内歯車62により構成される遊星歯車機構60を設ける。そして、第1のレゾルバ40から出力される電圧信号に基づいてインプットシャフト20の回転角及び遊星歯車63の位置を検出し、それらに基づいてステアリングホイールの操舵角を求める。
(もっと読む)
ステアリング装置
【課題】シンプルな構成で軽量化しつつ、コストを抑えたステアリング装置を提供する。
【解決手段】ステアリング装置において、入力軸32は、ステアリングホイールの操舵力が入力される。伝達比可変装置30は、入力軸32に連結される遊星歯車機構を有し、入力軸32の入力量に対する出力量の入出力比を変化させる。出力部54は、遊星歯車機構に接続され、出力量に応じて回転する。ロッド12,14は、一端が出力部54に連結し、他端が車輪24,26に連結して出力部54の回転に応じて車幅方向に移動する。
(もっと読む)
電動パワーステアリング装置
【課題】インバータのFETの駆動を簡易な構成と制御で安定的に行い得るようにした電動パワーステアリング装置を提供する。
【解決手段】PWMの各相デューティ指令値に基づいて、FETブリッジで成るインバータ106によりモータ20を駆動制御し、操舵系をアシスト制御するようになっている電動パワーステアリング装置において、FETブリッジの上段FETを駆動するための昇圧電源電圧を生成するチャージポンプ回路130及びブートストラップ回路140を具備し、高い方の電圧を昇圧電源電圧とする。
(もっと読む)
ステアバイワイヤ式操舵装置
【課題】小型化と軸方向長さ短縮化が可能なステアバイワイヤ式操舵装置を提供する。
【解決手段】操舵入力装置と、これと機械的に分離された転舵装置2と、操舵入力装置からの入力信号により転舵装置2を制御する転舵制御装置とを備える。転舵装置2は、転舵アクチュータ6と、その回転出力軸7の回転を軸方向への直進運動に変換して操舵リンク機構に伝達する直動機構部8とでなる。直動機構部8は、回転出力軸7の外径側の外輪部材13と、回転出力軸7に支持されるキャリア14と、その支持ピン15に支持されて回転出力軸7・外輪部材13間に配置された複数の遊星ローラ16と、遊星ローラ16の自公転を外輪部材13や回転出力軸7に対する軸方向への相対移動に変換させる軸方向相対移動手段17と、遊星ローラ16の相対移動に応じた外輪部材13の軸方向移動を操舵リンク機構に伝達して転舵輪を転舵させるアーム18とを有する。
(もっと読む)
電子制御装置
【課題】電源電圧の低下および回復があった場合に、制御部と開閉手段を保護する。
【解決手段】電子制御装置100は、モータ駆動回路11と、電源リレー19と、制御部1と、コンデンサ20と、電源電圧検出部2と、モータ/コンデンサ電圧検出部23とを備える。制御部1は、電源リレー19をON状態にして、モータ駆動回路11の制御を開始した後、電源電圧検出部2で検出された電源電圧の低下を察知すると、モータ駆動回路11の制御を停止し、電源リレー19をOFFし、スリープモードに移行する。その後、制御部1は、電源電圧が上基準値以上で、かつ、電源電圧とコンデンサ20の電圧との電位差が所定値より小さいことを検出した場合に、スリープモードを解除した状態で、電源リレー19をONし、モータ駆動回路11の制御を再開する。
(もっと読む)
車両制御システム
【課題】車両の挙動を安定させること。
【解決手段】車両10の旋回状態量に基づいた前輪Wfl,Wfrの転舵角又は前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角の制御により車両10の挙動制御を行う車両制御システムにおいて、旋回走行中で且つ前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角が制御されており、更に車両10の旋回状態が所定よりも大きい高G旋回領域にある場合に、前記前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角の制御における後輪Wrl,Wrrの転舵角制御の介入度合いを減少させる又は当該後輪Wrl,Wrrの転舵角制御を停止させること。
(もっと読む)
電動パワーステアリング装置
【課題】 自動停止条件の成立後に操舵トルクが増加する場合であっても、操舵トルクの急変を抑制可能な電動パワーステアリング装置を提供する。
【解決手段】 電動パワーステアリング装置10は、ステアリング系20の操舵トルクを検出する操舵トルクセンサ41と、ステアリング系20に補助トルクを与える電動モータ43と、操舵トルクに基づく目標電流値で電動モータ43のモータ電流値を制御するモータ電流制御部42と、を備える。モータ電流制御部42は、自動停止条件が成立するとエンジンを停止させるアイドリングストップ制御部100の自動停止条件が成立することに起因して、目標電流値を目標電流上限値以下に設定する。目標電流上限値は、目標電流値を目標電流上限値以下に設定することを開始した時Tsの目標電流値Imsと関連する。
(もっと読む)
61 - 70 / 5,655
[ Back to top ]