
Fターム[2B043BB03]の内容
農業機械一般(操向) (6,001) | 農業機械の作業別の種類 (591) | 耕耘装置などの土作業機 (68)
Fターム[2B043BB03]に分類される特許
41 - 60 / 68
作業車両
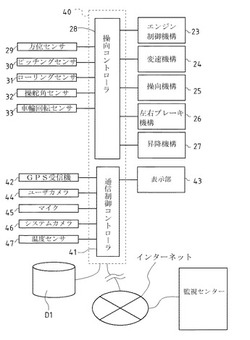
【課題】暗夜や積雪時などで障害物が視認できないときに車体の走行位置をGPS受信装置で受信して、障害物判断処理を実行する制御手段を具備した作業車両を提供する。
【解決手段】地図情報を格納するデータベースD1と、前記地図情報に基づく作業機の位置検出手段及び位置表示手段とを有する作業車両において、作業車両の走行時に、現在の走行位置と、データベースD1に格納された障害物地図情報と比較し、障害物が近づくと警報を発する。また、前記警報時に、障害物の種類と位置を表示する。
(もっと読む)
等高線に基づいて作成された農作業用作業線に沿って走行位置を明示する表示装置及び農作業方法

【課題】従来、圃場の耕耘は区画の一辺に添うように耕耘した、合理的な方法が主であった。しかし降雨時に水流が発生すると、土壌流失になり、表土を流亡させる原因となっていた。土壌流失を防ぐには等高線耕耘が最も良い方法であり、目視で同一標高作業できることを提供する。
【解決手段】あらかじめ作成しておいた圃場の高低マップデーターをもとにして、等高線をできるだけ直線に近い線として演算し、諸条件を考慮の上表示部に少なくとも現在位置と線と区画を表示して、表示部の線に添って作業することによって、等高線耕耘になるようにし、土壌流失を防止するようにした。
(もっと読む)
走行機に連結される畦形成機
【課題】容易な操作により制御部を切り換え走行機の異なる姿勢に対し常に一定の方向の直線状畦を形成する畦形成機を目標とする。
【解決手段】連結部は、装着フレームに設ける回動支点を中心に水平方向に回動可能であるとともに装着フレームと畦形成部間の距離を伸縮可能に設けており、制御部は、走行機が略直線状に前進して走行機と平行な直線状に畦形成作業する場合と、走行機が旋回しながら直線状に畦形成作業する場合とに対応して切換え可能であり、走行機が旋回しながら作業する場合の制御部は、装着フレームに設けた連結部の回動支点の回動変位量の情報を基に、あらかじめ設定されたプログラムにより連結部の回動支点の回動変位量に対応して装着フレームと畦形成部間の距離を変更させ、走行機が旋回移動するのに対し畦形成部は連続して直線状に移動しつつ畦形成作業を行わせる走行機に連結される畦形成機による。
(もっと読む)
位置情報取得システム
【課題】GPSを利用した位置情報取得システムでありながら、誤差の少ない正確な位置情報の取得を実現できるようにする。
【解決手段】圃場の進入口に配置され且つ識別情報IDを有するRFIDタグ41と、RFIDタグ41の識別情報を読み取るタグリーダ42と、人工衛星STからの電波にて自己の測定位置情報を検出する移動局ユニット43と、RFIDタグ41の基準位置情報を識別情報に対応させて予め記憶した外部サーバ44と、トラクタ1に搭載したコントローラ40とを備える。タグリーダ42と移動局ユニット43とはトラクタ1に搭載する。コントローラ40は、トラクタ1が圃場の進入口にあるときに基準位置情報を外部サーバ44から取得し、このときの測定位置情報と基準位置情報とから補正情報を算出し、補正情報と測定位置情報とに基づいて、トラクタ1の現在の自己位置情報を算出する。
(もっと読む)
作業車
【課題】 作業走行を終えて次の作業箇所に旋回走行して移動するとともに次の作業箇所に自走車体を位置合わせするに当たり、迅速に移動することができ、かつ、精度よく容易に位置合わせすることができる作業車を提供する。
【解決手段】 主変速装置17に連係された制御手段21に、走行速度検出手段22を連係させるとともに旋回角度計測手段30を備えてある。旋回角度計測手段30による計測旋回角度が設定旋回角度になると、制御手段21は、自走車体が低速設定手段24による設定低速度で走行するように、主変速装置17を減速操作する。
(もっと読む)
作業車輌の走行装置
【課題】左右のアクスルの回転速度を制御する各クラッチの摩擦多板式ディスクの押圧力をクラッチシリンダで調整している走行装置は、油圧ポンプから左右それぞれのクラッチシリンダへの圧油回路の長さが異なっていると圧力ロスによって圧力が変動し、変速が左右で同期しないことがある。そこで、本発明は比例減圧制御弁と切換制御弁の配置位置を工夫することによって前記問題点を解決することを課題とする。
ことを課題とする。
【解決手段】左右のアクスル11の回転出力を調整するクラッチシリンダ3への圧油をコントロールする比例減圧弁4と切換制御弁5を一体的に組み付けた制御ブロック6,7を設け、この制御ブロック6,7をミッションケース8の左右側部に取付けるとともにそれぞれを左右のクラッチシリンダ3へ接続配管した。
(もっと読む)
作業車の前輪増速駆動装置
【課題】前輪増速装置を装備した作業車において、旋回時に作業機上昇と前輪増速が同時に作動してしまい、圃場端の耕耘の終了部が斜めになることがあった。
【解決手段】ステアリングハンドル57の回動角を検知する手段と、作業機昇降制御手段と、前輪増速切換手段と、これらの制御手段を備え、ステアリングハンドル57を直進位置から設定角度以上切ると、作業機を上昇させ、前輪を増速駆動するようにした作業車において、前記作業機の上昇動作と前輪を増速駆動する動作との間に所定の時間差を設けた。
(もっと読む)
農作業機
【課題】 圃場の端部で確実に自動停止できる農作業機を提供する。
【解決手段】 農作業機1は、圃場あるいは畦上に立てたポール4を検知するセンサ4を備え、農作業機1の走行中にセンサ2がポール4を検知した場合に農作業機1の走行を自動停止する。
(もっと読む)
シート敷設作業機
【課題】トランスミッションケースの左右に揺動回動するクローラ走行装置を設けた管理作業機に、耕耘培土によって形成される溝にシートを敷設するシート敷設装置を設けることにより、シート敷設作業を精度よく行うことができるシート敷設作業機を提供する。
【解決手段】耕耘部3によって耕耘した耕耘土を溝成形部4で培土形成した溝8と溝肩部8aとに、シート敷設作業部5から繰り出されるシート7を敷設固定するシート敷設装置6を、管理作業機2に装着すると共に、該管理作業機2のトランスミッションケース13の両側に突出する車軸15に、該車軸15に軸支される駆動輪23と、上記車軸15に揺動回動自在に軸支されるクローラフレーム25に軸支した従動輪26とに、クローラ22を張設してなるクローラ走行装置9を設けた。
(もっと読む)
作業車両の油圧装置
【課題】パワーステアリング機構の油圧配管を短くしながら気泡を除去を図る。
【解決手段】油圧ポンプを少なくとも2個設け、これら油圧ポンプ20A,20Bとミッションケース4とをサクション用配管97によって接続しミッションケース4内の作動油を吸い上げて機体複数個所に配設される油圧作動部を制御する制御弁に供給すべく構成し、サクション用配管97の流出側において第1の油圧ポンプ20Aのサクションメタル121A、第2の油圧ポンプ20Bのサクションメタル121Bの順に接続され、パワーステアリング機構の戻り配管124を第1の油圧ポンプ20Aのサクションメタル121Aに接続する。
(もっと読む)
トラクタ作業機のローリング制御装置
【課題】圃場の畦際等でのトラクタ作業で操向旋回時における不安定なローリング制御状態を回避しようとする。
【解決手段】 トラクタ車体(1)に作業機(2)を装着し、車体(1)の左右傾斜角を検出する傾斜センサ(3)と、車速を検出する車速センサ(4)と、車体(1)の操向角を検出する操向センサ(5)等を有し、各センサ(3)、(4)、(5)の検出に基づいて、車体(1)に対して作業機(2)の連結姿勢を水平制御や、平行制御を行わせると共に、操向センサ(5)が一定以上の切り角を検出すると該水平制御を停止して平行制御を行わせ、この操向センサ(5)が一定以下の切り角を検出して一定時間経過すると該水平制御に復帰させる。
(もっと読む)
作業車両の自動操縦装置
【課題】 本発明の課題は、手動操縦、自動操縦に関わらず、自動的に切り替えるようにして、従来のような切替操作の煩雑さを解消し、作業能率の向上を図ることにある。
【解決手段】 本発明は、車両(1)の進路を検出するセンサ(21)と、該センサの検出によって車両を操向する操向アクチュエータ(25)を備えた作業車両の自動操縦装置において、前記車両には、操向操作を検出したときには、所定時間に亘り自動操縦を停止し、手動で操縦可能とする制御手段23を備えてあることを特徴とする。
(もっと読む)
作業車両の自動走行制御装置
【課題】畝W等の走行基準体に沿ったトラクタの自動走行制御の精度を向上する。
【解決手段】トラクタ1には進行方向前側部を撮像するステレオカメラ33を設け、トラクタ1の走行動力を前後進にわたり無段変速する逆転用クラッチ18L,18R及び正転用クラッチ19L,19Rを設ける。ステレオカメラ33により畔等の走行基準体を撮像しながら走行し、走行基準体とトラクタとの検出間隔が所定間隔からずれると、所定間隔に復帰するように正転用クラッチ19L,19Rを作動して操舵制御する。またトラクタ1が所定値以上の加速度を検出すると、所定時間にわたり操舵制御を停止する。
(もっと読む)
農業用トラクタのコントローラ
【課題】不揮発性メモリの内容を変更しようとしてもできるだけ安全性を確保しようとする。
【解決手段】農業用トラクタ(T)各部の作動を司るコントローラ(10)には、制御定数や基準値を書き込む不揮発メモリ(70、71)を設け、該コントローラ(10)にこれら制御定数や基準値を書換え可能な外部接続書換手段(73)を接続し、これら制御定数や基準値には安全に関する項目であるか否かを認識するデータを付し、上記外部接続書換手段(73)によって制御定数又は基準値を書換えする際に安全に関する項目であると判定されたときには、予め登録処理したパスワードの入力を条件に制御定数又は基準値を書換え可能に構成した。
(もっと読む)
作業車両
【課題】 複数の自動制御機能を備えた作業車両において、自動制御機能の設定を間違っても、簡単な操作で既定の設定状態を再現できるようにする。
【解決手段】 制御装置5は、モード切換手段によって、走行モード、作業モード及び設定モードに移行可能に構成され、走行モードでは、路上走行時において必要としない自動制御機能の制御作動を禁止し、作業モードでは、作業走行時において必要とする自動制御機能の設定を可能にすると共に、設定された自動制御機能の制御作動を許可し、設定モードでは、作業モードにおける自動制御機能の設定を、予め設定された既定値に戻すように構成される。
(もっと読む)
作業車両
【課題】 複数の自動制御機能を備える作業車両において、作業種別毎にオペレータの好みに応じた自動制御機能の入切設定を可能にする。
【解決手段】 制御装置5は、モード切換手段(モード切換スイッチ14)によって、少なくとも走行モードと作業モードとに移行可能に構成されると共に、当該作業モードにおける作業種別を選択する作業切換手段(作業切換スイッチ19)を備え、走行モードでは、路上走行時において必要としない自動制御機能の制御作動を禁止し、作業モードでは、作業切換手段によって選択された作業種別毎に自動制御機能の設定を可能にすると共に、設定された自動制御機能の制御作動を許可する。
(もっと読む)
作業車輌
【課題】 各種の自動制御機能の入切設定を一括して操作可能にするものでありながら、複数の農作業動作にも対応することが可能な作業車輌を提供する。
【解決手段】 農作業中に入設定すべき制御グループAの自動制御機能110を入設定にすると共に、農作業状態に合せて選択すべき制御グループBの自動制御機能120のそれぞれを個別に入切設定し得る作業モード101と、制御グループA及び制御グループBの自動制御機能110,120を全て切設定にする走行モード100と、制御グループA及び制御グループBの自動制御機能110,120のそれぞれを個別に入切設定し得るユーザ設定モード102とを設け、これらモードの切換えを選択操作し得るモード操作手段を設ける。このモード選択により、入切設定の一括操作を可能にするものでありながら、複数の農作業動作にも対応する。
(もっと読む)
作業車
【課題】 旋回走行の際、前車輪に掛かった抵抗に対応した適切なタイミングで前輪変速装置が前輪増速状態に切り換え操作されるようにする。
【解決手段】 前車輪が後車輪によって押された状態になったことを検出する前輪検出手段51が非検出状態にあると、制御手段50が前輪変速装置20を標準状態に切り換え操作し、前輪変速装置20が前車輪を後車輪と同一又はほぼ同一の駆動速度で駆動する。前輪検出手段51が検出状態になると、制御手段50が前輪変速装置20を前輪増速状態に切り換え操作し、前輪変速装置20が前車輪を後車輪よりも高速で駆動する。
(もっと読む)
農作業機
【課題】効率良く作業ができ、かつ畦道等を通る人や車等に注意を促すことができる農作業機を提供する。
【解決手段】農作業機1は、トラクタの後部に連結する左右方向に長手状の作業機本体11を備える。作業機本体11はフレームパイプ部4を有し、フレームパイプ部4の長手方向両端部にはチェーンケース部6およびブラケット部7を設ける。チェーンケース部6の上端部およびブラケット部7の上端部には、作業機本体11の側端部位置を視認するための光発生手段13を設ける。
(もっと読む)
作業車両
【課題】 トラクタなどの作業車両において、自動制御機能の入切設定に関する操作を簡略化すると共に、誤設定を防止する。
【解決手段】 制御装置26は、特定の自動制御機能(例えば、耕深自動制御機能)を、現状の走行形態に応じて自動的に入切する自動入切モード(おまかせモードON)と、特定の自動制御機能を、現状の走行形態に拘わらず、個別入切設定具の操作に応じて入切する手動入切モード(おまかせモードOFF)とを備えると共に、入切モード設定具(おまかせスイッチ15)の操作に応じて自動入切モードと手動入切モードの切換えを行う。
(もっと読む)
41 - 60 / 68
[ Back to top ]