
Fターム[2B043BB03]の内容
農業機械一般(操向) (6,001) | 農業機械の作業別の種類 (591) | 耕耘装置などの土作業機 (68)
Fターム[2B043BB03]に分類される特許
21 - 40 / 68
作業車の制御装置
【課題】圃場の状況や作業の内容に合わせて、精度よく車体の状態を作業状態から非作業状態に切り換えることができる作業車の制御装置を実現する。
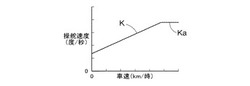
【解決手段】作業車の制御装置において、操縦ハンドル6の操舵速度がしきい値以上で、且つ、前輪2の切れ角が所定角度以上であると、車体1の状態を作業状態から非作業状態に切り換える車体状態切換手段51,53を備えて、車速検出手段63により検出した車速が速くなる程、しきい値Kを高く設定してある。
(もっと読む)
作業車の制御装置

【課題】旋回作業に伴うものでない可能性の高い操縦ハンドルの操作で作業装置が自動的に上昇することを防止し、作業装置の上昇を適切なタイミングで行うことができる作業車の制御装置を実現する。
【解決手段】作業車の制御装置において、切れ角が所定上昇角度α1以上になると、作業装置Rを上昇させる自動上昇手段53を備え、操縦ハンドル6が右側又は左側の一方側に操作された直後に、操縦ハンドル6が右側又は左側の他方側に操作され、他方側への操縦ハンドル6の操作により切れ角が所定上昇角度α1以上になった場合に、自動上昇手段53が作動しないように制御する制御手段を備えてある。
(もっと読む)
作業車両
【課題】作業習慣や好みに応じて作業を選択する場合、煩わしい操作に時間を空費する課題を解決する。
【解決手段】少なくとも四輪駆動の使用の有無、旋回時におけるブレーキ力、後進時に作業機を自動的に上昇させるバックアップ制御の使用の有無の組み合わせから構成した複数の作業モードを、スイッチのON、OFF操作で切替選択ができる構成としている作業車両において、作業習慣や好みに基づいて使用する作業モードを、予め選択して登録できる構成とし、この登録した内容を選択することにより、予め登録している作業モードが自動的に設定される構成としたことを特徴とする作業車両の構成とする。
(もっと読む)
作業車の走行変速構造
【課題】 作業車の走行変速構造において、旋回時の機体の安定性を確保しながら、作業能率の向上を図る。
【解決手段】 機体の旋回開始時に速度センサーによって検出された機体の走行速度V1が、事前に設定された設定速度V11よりも高速であると、機体の走行速度V1を減速操作する減速手段を備える。機体の旋回開始が検出された場合において、機体の旋回開始時に速度センサーによって検出された機体の走行速度V1が、設定速度V11よりも低速であると、減速手段の作動を阻止する牽制手段を備える。
(もっと読む)
作業車輌
【課題】各種昇降制御及び駆動制御が停止された走行モードにあっても、駆動制御の一部を変更し得る変更手段を備えた作業車輌を提供する。
【解決手段】トラクタ1は、作業機10の各種昇降制御及び走行機体5の各種駆動制御をそれぞれ各別に変更設定する設定手段(スイッチ)と、該設定手段により設定された状態で一括作動する作業モードとこれら各種昇降制御及び駆動制御を停止する走行モードとに切換えるおまかせスイッチとを備える。制御モードが走行モードに選択された状態であっても、四駆切換えスイッチによって、二輪駆動から四輪駆動に切換えることができるように構成する。これにより、走行状況に応じた適正な制御に変更できる。
(もっと読む)
作業車両
【課題】トラクタ等の旋回制御において、ステアリングハンドルの操向操作を同一の切り角度に操作した場合、車両に軸架されている車輪のトレッド幅の違いがあっても、旋回半径を同一にするステアリング制御機構を提供する。
【解決手段】作業車両4に軸架している左右の後輪5は、油圧シリンダの伸縮作動によってトレッド幅が変更調節可能に構成され、旋回制御に関連する左右の前輪2の切れ角データは、後輪のトレッド幅に対応して決められる構成とし、前記コントローラは、トレッド幅の変更調節に際し、選択したトレッド幅に対応した切れ角データが自動的に設定される構成としたことを特徴とする作業車両のステアリング制御機構とする。
(もっと読む)
農作業機
【課題】走行機体に動力を供給する動力源の駆動及び走行機体に連結してある作業機の作動を制御する複数の制御方法を適宜選択し、操作性及び利便性を向上させることができる農作業機を提供する。
【解決手段】耕耘機制御装置は前記作業モード切替スイッチが押下されたことを示す信号が入力され(ステップS1)該スイッチにより選択された作業モードが通常モードであるときは(ステップS2)所定のランプを点灯させて通常モードでの制御を行う(ステップS3、S4、S5)。選択された作業モードが枕地モードであるときは(ステップS6)所定のランプを点灯させて枕地モードでの制御を行う(ステップS7、S8、S9)。選択された作業モードが走行モードであるときは(ステップS6)所定のランプを消灯させて走行モードでの制御を行う(ステップS10、S11、S12)。
(もっと読む)
作業車両
【課題】音声による運転制御により安全性を高めた作業車両を提供することである。
【解決手段】音声認識装置121は、機体Tが停止している場合又はトラクタに連結した作業機Rが作動停止している場合に、これらを動作開始する操作指令がマイク122又は送受信装置120からあると、スピーカ124などで動作開始をする旨を報知した後、機体Tの走行開始出力又は作業機Rの動作出力を実施し、動いている機体Tを停止させる操作指令又は機体Tに連結した作業機Rの作動停止指令に対しては、機体Tの走行停止又は作業機Rの作動停止用の出力をした後、音声による返答を音声認識装置121を経由して返答内容(機体Tの走行停止又は作業機の作動停止の完了)を報知する構成とした。機体T又は作業機Rが間違って走行又は作動しないときなどには安全確保できる。また、それらの場合に機体T又は作業機Rが迅速に停止する側に動くため安全である。
(もっと読む)
移動車両の直進誘導システム
【課題】運転者の負担を軽減し、熟練者でなくても高能率・高精度な作業ができる移動車両の直進誘導システムを提供する。
【解決手段】この移動車両の直進誘導システムは、移動車両搭載部1、移動車両が直進走行すべき走路前方の延長線上に設置される遠方目標部2を備える。移動車両搭載部1はカメラ部11、カメラ部11からの画像を処理し走行情報を出力する画像処理部12、走行情報に基づき移動車両を制御する車両制御部14,操向制御機構15を有する。遠方目標部2はカメラ部11の撮像周期と最大露光時間の合計時間以上で撮像周期の2倍以下の時間の点灯と消灯とを繰り返す。画像処理部12は現フレームと前フレーム及び、現フレームと前々フレームにおいて第1,第2の遠方目標部候補画素を抽出し、第1,第2の遠方目標部候補画素を統合し、統合した遠方目標部候補画素に対し遠方目標部2の位置検出を行い、検出結果に基づき走行情報を生成する。
(もっと読む)
トラクタ誘導装置
【課題】 初心者から熟練者、特に近年増加傾向にある高齢者や女性のような農業従事者にも、安全且つ容易に畝筋に沿っての正確なトラクタを運転、操作可能とする新技術を提供する。
【解決手段】 農業用トラクタTの運転席S前方のボンネットB上面で運転者の前方視線E上となる位置に、走行案内とすべき畝9に照準可能な縦棒上端型または後上向き傾斜姿勢棒上端型の照門3、または、経緯線60,61を張設した照準枠6の少なくとも何れか一方を、着脱自在で自立、仮固定可能となるようにした照門器2と、同トラクタTのボンネットB前端付近で同じく運転者の前方視線E上となる位置に、走行案内とすべき左右隣接畝90,91または畝合92,93への照準用とする左右幅調節機構81を組み込んでなる水平照星棒80を、着脱自在で自立、仮固定可能となるようにした照星器8との組合せからなるトラクタ誘導装置1である。
(もっと読む)
耕耘機
【課題】
耕耘中に機体の耕耘方向を変更しやすくすることを課題とする。
【解決手段】
前記耕耘爪(1)の上方を耕耘カバー(11)で覆い、該耕耘カバー(11)の左右中央部を前輪(13)を支持する前輪ロッド(14)を貫通する構成とし、該前輪ロッド(14)には前輪ロッド(14)を縦軸芯に回動させる回動部材(21a,21b)を設け、該回動部材(21a,21b)は操作ハンドル(8)に設ける把持部材(23a,23b)と連結する構成とし、左右何れかの把持部材(23a,23b)を把持すると回動部材(21a,21b)が作動して前輪ロッド(14)が縦軸芯に回動すると共に、前輪(13)の向きが変更する構成とした。
(もっと読む)
作業車の車体状態切り換え構造
【課題】 旋回走行の開始から車体の状態が第2状態に切り換わるまでに要する時間が長くなることを抑制しながら、位置合わせ走行時に車体の状態が不測に第2状態に切り換わる誤作動の発生を抑制して、それらに起因した不都合の発生を抑制することにある。
【解決手段】 操舵輪7の直進位置からの切れ角を検出する切角センサ55と、この切角センサ55の検出に基づいて車体の状態を切り換える車体状態切換手段48とを備え、切角センサ55により検出される切れ角が設定角度を超えると、車体状態切換手段55が、車体の状態を第1状態から第2状態に切り換えるように構成した作業車の車体状態切り換え構造において、車体の作業走行経路に対する位置ズレを修正する位置合わせ走行の開始を検知するとともに、その検知に基づいて設定角度を大きい角度に変更する設定角度変更手段48Eを備えてある。
(もっと読む)
作業車の車体状態切り換え構造
【課題】 作業走行時において車体の状態が不測に第1状態から第2状態に切り換わる誤作動の発生を抑制し、その誤作動に起因した不都合の発生を抑制する。
【解決手段】 切角センサ55が検出する操舵輪7,12の切れ角が設定角度を超えると、車体状態切換手段48が、車体の状態を第1状態から第2状態に切り換えるように構成し、操舵速度を検出する操舵速度検出手段86と、設定角度を変更する設定角度変更手段48Eとを備え、設定角度変更手段48Eが、操舵速度検出手段86の検出に基づいて、操舵速度が遅くなると、設定角度が設定上限角度に達するまでの間、検出された操舵速度に応じて設定角度が大きくなるように、また、操舵速度が速くなると、設定角度が設定下限角度に達するまでの間、検出された操舵速度に応じて設定角度が小さくなるように、設定角度を変更するように構成した。
(もっと読む)
乗用型耕耘機
【課題】耕耘用のローターの昇降に伴って各部が動いたり各部の間隔が変化したときに、動力伝達装置がそれらに素早く追従して動くことができるようにしてローターの迅速な昇降操作を可能とした乗用型耕耘機を提供する。
【解決手段】乗用型耕耘機(A)は、前輪と後輪の間に設けられ昇降動可能な耕耘用のローターと、ローターを昇降動させる昇降操作装置(8)と、ローターを駆動する耕耘駆動系(7)と、前輪を駆動する走行駆動系(5)とを有し、走行駆動系(5)と耕耘駆動系(7)には動力伝達装置(4)で原動機(E)の動力が伝えられ、走行駆動系(5)と耕耘駆動系(7)は一体となって回動軸(56)を中心として回動可能で、動力伝達装置(4)は基端がユニバーサルジョイント(41)を介し動力取出軸(13)に接続されている伸縮可能なドライブシャフト(42)と、ドライブシャフト(42)から伝えられる動力を走行駆動系(5)と耕耘駆動系(7)に分配する動力分配軸とを備えている。
(もっと読む)
畦成形機
【課題】従来の畦成形機は、構成や制御が複雑となり、操作が難しいとともに保守点検等にコストが係り全体のコストが嵩む問題があった。
【解決手段】装着フレーム1と、支持フレーム回動軸20を中心に水平回動手段25によって回動可能である支持フレーム2と、支持フレーム2に沿って移動可能に設けられるとともに水平回動する畦成形作業部3と、一端を装着フレーム1の支持フレーム回動軸20よりも前側に回動自在に設けるとともに他端は畦成形作業部3に回動自在に設け装着フレーム1と畦成形作業部3とを連結する連結部材7とを有し、支持フレーム2を走行機Tの直進方向と直交する方向から45度の回動角以内の予め設定した位置に自動回動させ、自動回動させた位置から支持フレーム2を回動させるとともに走行機Tが畦から離れる方向に旋回走行しながら直線状の畦を成形する畦成形作業を行なう畦成形機による。
(もっと読む)
トラクタ
【課題】トラクタに装着した作業機を、旋回操作に関連して自動的に昇降する作業機自動昇降制御装置は、旋回操作が終了したことが検出されると、自動下降機構が働いて作業機を自動的に下降するから、操作の手間が省けて便利である反面、危険性の伴う課題がある。
【解決手段】この発明は、トラクタに昇降自由に作業機が設けられ、前輪の切れ角が設定値以上になったとき、前記作業機を上昇する自動上昇機構が設けられ、前記前輪の切れ角が設定値未満になると、前記作業機を下降する自動下降機構が設けられている旋回時のトラクタにおいて、上昇移動が手動操作によって行われた作業機は、旋回操作の終了が判断された後であっても、自動下降機構による自動下降ができない構成としたトラクタの構成とする。
(もっと読む)
畦成形機
【課題】 走行機の蛇行に対して畦成形作業部を直進させることが困難であった。
【解決手段】装着フレーム1と、支持フレーム2と、制御部8と、検知部7と、盛土部及び成畦部とを有する畦成形作業部5とを具備し走行機Tに装着され作業する畦成形機であり、走行機Tが畦Rに平行して走行しながら畦Rを成形する標準畦成形作業と、走行機Tが畦Rとの間隔を離隔走行しながら畦を成形する離隔畦成形作業と、走行機Tが畦Rとの間隔を狭めながら幅寄せ走行しながら畦を成形する幅寄せ畦成形作業とを行なうことができ、制御部8は、走行機Tが蛇行走行した場合であっても畦成形作業部5の姿勢を自動的に直線の畦を成形できる向きに制御可能な畦成形機による。
(もっと読む)
作業車
【課題】ロータリ耕耘装置を下降位置から上昇させる際に形成される耕耘跡の発生を防止でき、圃場での農作業の作業性を向上させることのできる作業車を実現する。
【解決手段】走行車体1の後部に装備されたロータリ耕耘装置Fを昇降駆動する昇降機構8,9と、操作指示を出す操作指示手段37と、を備え、操作指示手段37からの操作指示に基づいて、ロータリ耕耘装置Fを予め設定された中間位置から上昇位置まで上昇させる速度よりも低速で、ロータリ耕耘装置Fを下降位置から中間位置まで上昇させるように、昇降機構8,9を駆動させる耕耘装置自動上昇手段を備えて、作業車を構成する。
(もっと読む)
走行車両
【課題】クラッチペダルの踏み込みなどのクラッチ操作手段の操作量に連動して変速装置の入り切りをする油圧クラッチがクラッチ操作手段の操作フィーリングに影響を与えることがないようにした油圧制御装置を有する作業車両を提供すること。
【解決手段】複数の油圧クラッチ(D、・・・)の各油圧クラッチ毎にエンジン出力軸1から該当する油圧クラッチのクラッチ軸までの減速比と該油圧クラッチの回転数をエンジン出力軸1の回転数センサ122の検出値に基づき推測し、油圧クラッチ毎に該油圧クラッチの回転により発生する遠心力の影響によるクラッチピストンの推力を補正し、該補正値に基づき油圧クラッチ毎の作動油の油圧圧力を補正して油圧クラッチ毎の非接続状態から接続状態までの前記油圧圧力を変更する油圧制御装置100を備えた走行車両である。
(もっと読む)
畦成形機
【課題】従来圃場隅部の作業を行なう作業機は、圃場隅部における畦方向への成形圧力が減少するため堅固な畦を形成できない課題がある。
【課題手段】装着フレーム1から斜め後方へ固定されて延設される支持フレーム2と、支持フレーム2に設けられるとともに、装着フレーム1との距離を伸縮させる水平移動手段4によって支持フレーム2に沿って装着フレーム1に対して遠近移動可能であり、かつ遠近移動可能である1つの水平回動軸54を中心に水平回動手段6又は自由回動によって水平方向に回動可能である畦成形作業部5と、畦成形作業部5の前側に設けられる前部案内輪7と、畦成形作業部5の後側に設けられる後部案内輪8とを有し、支持フレーム2に沿って装着フレーム1に対して遠近移動する畦成形作業部5の水平回動軸54が、常に前部案内輪7と後部案内輪8との間に位置するように設けられる畦成形機による。
(もっと読む)
21 - 40 / 68
[ Back to top ]