
Fターム[2B043DC01]の内容
農業機械一般(操向) (6,001) | 走行装置の構成、配置又は取付け (202) | クローラ(履帯) (94)
Fターム[2B043DC01]に分類される特許
41 - 60 / 94
作業車の走行伝動構造
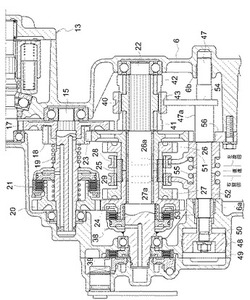
【課題】 作業車の走行伝動構造において、右及び左の伝動部材を伝動位置側に付勢するバネを必要以上に強いものに設定しなくても、右及び左の伝動部材を伝動位置に保持することができるようにように構成する。
【解決手段】 シフト軸47が中立位置(直進位置)にスライド操作されると、右及び左の操作部材51,52により右及び左の伝動部材28,29が伝動位置に操作され、バネ55により右及び左の操作部材51,52が右及び左の伝動部材28,29の伝動位置に保持される。シフト軸47が右旋回位置(左旋回位置)にスライド操作されると、右の操作部材51(左の操作部材52)により、右の伝動部材28(左の伝動部材29)が遮断位置に操作され、右の操作部材51(左の操作部材52)を介してバネ55が左の操作部材52(右の操作部材51)に押圧されて、左の操作部材52(右の操作部材51)が左の伝動部材29(右の伝動部材28)の伝動位置に保持される。
(もっと読む)
作業車両

【課題】走行機体に搭載されたエンジンの動力を、油圧式駆動装置を介して左右の走行クローラに伝達するように構成する一方、走行機体の進行方向を変更操作するための操向ハンドルを備える作業車両において、不要であるにも拘らず、操向ハンドルの切り過ぎにて走行機体をスピンターンさせ、圃場を荒らすという問題を解消する。
【解決手段】操向ハンドルを左又は右スピンターン領域に回動操作したときに、操向ハンドルの回動操作に対して抵抗を付与するデテント機構370の作用にて、操向ハンドルの操作感触を「重い」状態にする。
(もっと読む)
自動収穫ロボット用車両
【課題】 農作業を自動で担うために狭く段差などのある圃場内の無限軌道を快適に走行して効率よく旋回することが可能な自動収穫ロボット用車両を提供すること。
【解決手段】 圃場における農作業を自動で担うため、該圃場内の無限軌道を走行する自動収穫ロボット用車両であって、前車軸に装着されたタイヤ付ホイール型の操向可能な前輪と、後車軸に設けられて独立に駆動制御可能な左右一対のクローラ走行装置とを備え、該クローラ走行装置は、少なくとも、駆動力を有する駆動輪と、該駆動輪の回転に従動する従動輪と、該駆動輪及び従動輪に巻回される無端状クローラとからなり、上方の車両本体部に対して略垂直方向の回転軸によって水平方向に回転自在に連結されていることを特徴とする自動収穫ロボット用車両とする。
(もっと読む)
作業車
【課題】作業車の旋回状況に応じて適切なエンジン制御を行なう。
【解決手段】コモンレール式ディーゼルエンジン1を搭載した作業車において、作業中の旋回時に運転者によるハンドル2操舵角を検出手段により検出し、該操舵角が所定角度以上になるとエンジン制御をドループ制御からアイソクロナス制御に切り替え、操舵角の大きさに応じてエンジン回転数を低下させると共に、作業車が略直進状態となるように操舵角が復帰しときは、エンジン制御を再び元のドループ制御に切り替えるエンジン制御の切替手段を設けたことを特徴とする作業車の構成とする
(もっと読む)
コンバイン
【課題】回転式の操向操作具に設けた進路変更手段によって進路変更操作を容易・確実にすると共に、スピン旋回を入り切りさせて誤操作を防止できるものとする。
【解決手段】旋回用の油圧式無段変速装置(40)の回転出力を、モニターを備えた操向操作具(16)の操作によって調節できるように構成する。そして、操向操作具(16)を左右いずれかに回転操作すると回転操作方向側のホイル軸(30)を減速させて旋回し、操向操作具(16)とは別の操作具の操作によってスピン旋回を入りにした状態で操向操作具(16)を更に回転操作すると左右のホイル軸(30,30)を互いに逆回転させてスピン旋回すると共に表示部(22)に操向操作具(16)の回転操作状態を表示するように構成する。更に、操向操作具(16)の回転操作によらずに機体を左右に方向修正することのできる進路変更手段(17)を設ける。
(もっと読む)
コンバイン
【課題】刈始めに際し、方向自動制御による操向クラッチ出力が手動操作による操向クラッチ出力に重なることを回避し、出力の重複によってオペレータの操作フィーリングが低下するという問題を解消する。
【解決手段】刈取穀稈を分草するデバイダ8と、刈取穀稈に対するデバイダ8の位置を検出する方向センサ18と、方向センサ18の検出信号に応じて機体の走行方向を自動的に制御する方向自動制御部21とを備えるコンバイン1において、方向センサ18の位置よりも下流の穀稈搬送経路で搬送穀稈を検出する搬送穀稈検出センサ(扱深メインセンサ17)を備え、該搬送穀稈検出センサのONを方向自動制御の開始条件とする。
(もっと読む)
作業機の操向構造
【課題】 ステアリング操作具の操作に応じた機体旋回を行うことができるとともに、必要な時にのみ、より小回りの旋回を随意に行うことができる、操作性に優れた操向構造を提供する。
【解決手段】 ステアリング操作具72を操作することで左右のクローラ走行装置1に速度差を与えて、ステアリング操作具72が操作された方向に対応して機体を旋回させるように構成した作業機の操向構造において、復帰型の旋回モード変更操作具75を備え、この旋回モード変更操作具75を操作している間だけ、ステアリング操作具72の左右方向の操作量に応じて設定された左右のクローラ走行装置1の速度比を変更して旋回機能を高める旋回モードとなるように構成してある。
(もっと読む)
コンバイン
【課題】株間距離の大きい疎植圃場を含めて植付け条に対する追従性を確保することが可能となる簡易な構成のコンバインを提供する。
【解決手段】コンバインは、刈取部Eに取付けられて刈取るべき未刈穀稈を接触により検出する穀稈センサ1a(または1b)の検出信号により、機体進行方向に続く刈取条の未刈穀稈列A(またはB)に追従走行するべく左右の旋回方向を決定して機体の進行方向を制御処理する制御部Cを備えて構成され、上記穀稈センサ1a(または1b)はコンバインが刈取るべき刈取幅のいずれかの外側位置で同側の最外側穀稈A(またはB)までの内側方向距離を検出する位置に設定し、その内側方向距離が所定値となるように上記制御部Cが左右方向の機体旋回制御処理をするものである。
(もっと読む)
作業車輌の遠隔操作システム
【課題】携帯電話機の局番に対応させて設定した作業車輌しか遠隔操作できないものとして、混信による作業車輌の暴走を防いで安全性を向上させると共に、作業車輌の盗難を防ぐ。
【解決手段】携帯電話機40と作業車輌A側の制御装置とを電話回線または電話回線とインターネットとを介して接続可能に構成すると共に、該携帯電話40の操作に基づいて作業車輌A側の制御装置から走行変速装置又は操向制御装置又はエンジン制御部又は作業装置昇降制御部へ出力するように構成する。
(もっと読む)
走行装置
【課題】簡単な構造からなる走行用HSTと旋回用HSTを備えた走行装置を提供すること。
【解決手段】左右一対の走行クローラ(3)へ走行駆動力を伝動する走行用無段変速手段(20)と該左右一対の走行クローラ(3)に速度差を与える旋回用無段変速手段(70)とを設ける。該走行用無段変速手段(20)及び旋回用無段変速手段(70)をポートブロック(22)に設置する。走行用無段変速手段(20)における走行用可変容量油圧ポンプ(21)と走行用油圧モータ(23)を結ぶ油圧回路(22a)と旋回用無段変速手段(70)における旋回用可変容量油圧ポンプ(71)と旋回用油圧モータ(73)を結ぶ油圧回路(22b)とをポートブロック(22)内に設ける。該走行用無段変速手段(20)と旋回用無段変速手段(70)とを単一のユニットとして走行トランスミッション(19)のケースに着脱自在に取り付ける。
(もっと読む)
コンバイン
【課題】簡単な構造からなる走行用HSTと旋回用HSTを備えた走行トランスミッションを具備するコンバインを提供すること。
【解決手段】左右一対の走行クローラ(3)へ走行駆動力を伝動する走行用無段変速手段(20)と該左右一対の走行クローラ(3)に速度差を与える旋回用無段変速手段(70)とを設ける。該走行用無段変速手段(20)及び旋回用無段変速手段(70)をポートブロック(22)に設置する。走行用無段変速手段(20)における走行用可変容量油圧ポンプ(21)と走行用油圧モータ(23)を結ぶ油圧回路(22a)と旋回用無段変速手段(70)における旋回用可変容量油圧ポンプ(71)と旋回用油圧モータ(73)を結ぶ油圧回路(22b)とをポートブロック(22)内に設ける。該走行用無段変速手段(20)と旋回用無段変速手段(70)とを単一のユニットとして走行トランスミッション(19)のケースに着脱自在に取り付ける。
(もっと読む)
作業用車両
【課題】小回り旋回をすることができるものにおいて、構造を簡素にでき、小形化できるとともに、走行装置の回転速度を滑らかに変化させて安定性よく旋回することができる作業用車両を提供する。
【解決手段】エンジン6が搭載された機体と、該機体の進行方向に対して両側に配され該機体を支持する第1及び第2の走行装置1,2と、エンジン6の回転を無段階に変速する無段変速機16と、無段変速機16が変速した回転動力を第1及び第2の走行装置1,2に伝動する第1及び第2の差動機構18,19と、一つの電動モータ21と、該電動モータ21の駆動力を、電動モータ21の伝動経路を切換えて第1又は第2の差動機構18,19に伝動する切換伝動機構22とを備え、一つの電動モータ21により小回り旋回を可能にした。
(もっと読む)
除草ロボット
【課題】簡易且つ経済的に水田雑草の防除を可能とする、除草用の自走ロボットを提供する。
【解決手段】ボディと、ボディの左右に設けられた駆動装置と、ボディの前方中央及び左右に設けられたセンサーと、水田表層土の撹拌装置とを備え、障害物を避けて走行し、表層土を撹拌することを特徴とする水田除草ロボットであり、前記撹拌装置は、クランクの揺動により上下前後に振動する撹拌ブレードからなる撹拌装置、回転軸に取り付けられた回転する撹拌ブレードからなる撹拌装置、又は回転軸に取り付けられた回転する弾性を有する撹拌ブレードと反発発生固定棒とからなる撹拌装置のいずれか一つ以上を用いることが好ましい。
(もっと読む)
クローラ型トラクタ
【課題】後輪駆動のホイール型トラクタの構造を可能な限り利用し、最低地上高を最大限確保可能な後輪駆動のクローラ型トラクタを提供する。
【解決手段】両端に従動アイドラを回転可能に支持するトラクタフレームとリアアクスルに装着された駆動スプロケットを有し、かつ前記従動アイドラと前記駆動スプロケットとの間にクローラが巻装されるクローラ式走行装置を車両の左右に備えたクローラ型トラクタにおいて、前記駆動スプロケットがHST旋回ポンプ及びHST旋回モータからの動力によって旋回され、かつHST旋回ポンプとHST旋回モータからの動力によって旋回されかつHST旋回ポンプとHST旋回モータとが分割配置されるとともに、前記HST旋回ポンプの駆動を、チェン、ギア、ベルト等を介して利用する。
(もっと読む)
シート敷設作業機
【課題】トランスミッションケースの左右に揺動回動するクローラ走行装置を設けた管理作業機に、耕耘培土によって形成される溝にシートを敷設するシート敷設装置を設けることにより、シート敷設作業を精度よく行うことができるシート敷設作業機を提供する。
【解決手段】耕耘部3によって耕耘した耕耘土を溝成形部4で培土形成した溝8と溝肩部8aとに、シート敷設作業部5から繰り出されるシート7を敷設固定するシート敷設装置6を、管理作業機2に装着すると共に、該管理作業機2のトランスミッションケース13の両側に突出する車軸15に、該車軸15に軸支される駆動輪23と、上記車軸15に揺動回動自在に軸支されるクローラフレーム25に軸支した従動輪26とに、クローラ22を張設してなるクローラ走行装置9を設けた。
(もっと読む)
作業車の走行制御装置
【課題】 直進走行において動作異常が発生した場合であっても、直進走行並びに旋回走行を行うことが可能となる作業車の走行制御装置を提供する。
【解決手段】 直進用の無段変速装置7から左右の走行装置1R,1Lの夫々への動力伝達を各別に断続する一対の直進用伝動クラッチ27,27と、旋回用の無段変速装置8から左右の走行装置1R,1Lの夫々への動力伝達を各別に断続する一対の旋回用伝動クラッチ25,25とを備え、異常用制御モードでは、直進が指令されると旋回用の無段変速装置8の変速出力を左右の走行装置1R,1L夫々に伝達し、右旋回が指令されると旋回用の無段変速装置8の変速出力を左側の走行装置1Lに伝達しかつ右側の走行装置1Rを非駆動状態とし、左旋回が指令されると旋回用の無段変速装置8の変速出力を右側の走行装置1Rに伝達しかつ左側の走行装置1Lを非駆動状態とすべく、各伝動クラッチを切り換える。
(もっと読む)
作業車の走行制御装置
【課題】 直進走行及び旋回走行を良好に行うことができ、しかも、直進走行時において一時的に大きな走行駆動力が必要となる場合に良好な直進走行を行うことが可能となる作業車の走行制御装置を提供する。
【解決手段】 直進が指令されると直進用の無段変速装置7の出力を左右一対の走行装置1R,1Lの夫々に伝達し、右旋回が指令されると直進用の無段変速装置7の出力を左側の走行装置1Lに伝達し且つ旋回用の無段変速装置8の出力を右側の走行装置1Rに伝達し、左旋回が指令されると直進用の無段変速装置7の出力を右側の走行装置1Rに伝達し且つ旋回用の無段変速装置8の出力を左側の走行装置1Lに伝達し、走行駆動力の増大が指令されると、直進用の無段変速装置7の出力及び旋回用の無段変速装置8の出力を左右一対の走行装置1R,1Lの夫々に伝達して、旋回用の無段変速装置8を直進用の無段変速装置7と同じ又は略同じ速度になるように制御する。
(もっと読む)
コンバイン用操作レバー構造
【課題】 昇降用切換弁、操向用切換弁及び可変リリーフ弁を単一の操作レバーで操作可能とし、且つ、操向用切換弁及び可変リリーフ弁の作動制御を行う際の動作と、昇降用切換弁の作動制御を行う際の動作との干渉を防止しつつ、可及的に小型化及び構造簡略化を図る。
【解決手段】 操向基準軸線回り揺動自在な操向用従動部材に、昇降基準軸線回り相対回転自在且つ操向基準線回り相対回転不能に昇降用従動部材を連結させる。操作レバーの車輌左右方向への揺動操作によって前記昇降用従動部材を介して前記操向用従動部材が操向基準軸線回りに揺動し、車輌前後方向への揺動操作によって昇降用従動部材が昇降基準軸線回りに揺動するように、該操作レバーを昇降用従動部材に連結する。操作レバーの車輌前後方向に関する揺動方向を検出する昇降検出機構は、操向用従動部材に支持されたセンサー部材と、昇降用従動部材に支持された被検出体とを有する。
(もっと読む)
コンバイン用トランスミッション
【課題】 車輌操向用の一対の油圧アクチュエータ、前記一対の油圧アクチュエータへ作動油を供給する補助油圧ポンプ本体、前記補助油圧ポンプ本体から前記一対の油圧アクチュエータへの作動油の給排を司る操向用切換弁、及び、駆動源からの回転動力を無段変速するHSTの相互干渉を防止しつつ、小型化を図り得るコンバイン用トランスミッションを提供する。
【解決手段】 走行系変速装置を構成する前記HSTを走行系出力軸より上方において前記ミッションケースの右側面に支持させ、前記補助油圧ポンプ本体が前記HSTのポンプ軸によって作動的に駆動される状態で、前記補助油圧ポンプケースを前記HSTに直接又は間接的に支持させ、且つ、前記一対のアクチュエータ及び前記操向用切換弁を含む前記操向用バルブユニットを前記ミッションケースの前面に支持させる。
(もっと読む)
作業機の走行駆動装置
【課題】作業機の旋回操作性の向上によって作業能率を向上させると共に旋回用の静油圧式無段変速装置の操作機構を簡素化して安価に提供できるものとする。
【解決手段】可変容量式の油圧ポンプ(1a)と固定容量式の油圧モータ(1b)とから成る走行用の静油圧式無段変速装置(1)の出力と、可変容量式の油圧ポンプ(2a)と可変容量式の油圧モータ(2b)とから成る旋回用の静油圧式無段変速装置(2)の出力とを左右の遊星歯車機構(3L,3R)へ夫々入力し、該左右の遊星歯車機構(3L,3R)によって合成された出力によって左右の車軸(4L,4R)を差動させて旋回できるように構成する。旋回用の静油圧式無段変速装置(2)の油圧モータ(2b)の容量を、操向スイッチ(64L,64R)の操作又は自動方向制御用センサー(69L,69R)の検出結果に応じて変更する。
(もっと読む)
41 - 60 / 94
[ Back to top ]