
Fターム[2B043EE01]の内容
農業機械一般(操向) (6,001) | 報知装置の構成、配置又は取付け (86) | 表示装置 (38)
Fターム[2B043EE01]に分類される特許
21 - 38 / 38
作業車両
【課題】暗夜や積雪時などで障害物が視認できないときに車体の走行位置をGPS受信装置で受信して、障害物判断処理を実行する制御手段を具備した作業車両を提供する。
【解決手段】地図情報を格納するデータベースD1と、前記地図情報に基づく作業機の位置検出手段及び位置表示手段とを有する作業車両において、作業車両の走行時に、現在の走行位置と、データベースD1に格納された障害物地図情報と比較し、障害物が近づくと警報を発する。また、前記警報時に、障害物の種類と位置を表示する。
(もっと読む)
農用作業車

【課題】自律走行を行う農用作業車において、オペレータが現在の機体位置の情報(即ち、機体位置が目標経路または目標方向に合致しているか否か、または、目標経路と合致していない場合には機体のズレ方向)を容易に知ることができる技術を提供する。
【解決手段】目標経路の生成後において、該目標経路に対する田植機1の機体位置の変位方向を表示し、かつ、田植機1が自律走行可能か否かを表示する自律走行位置表示ランプ45を具備する構成とする。
(もっと読む)
自動車を操縦するための方法および配置
走行方向で自動車(1)前方にある地面から画像情報が把握され、これらの画像情報から走行方向および/または走行速度を変化させるための操縦命令が作り出される自動車を操縦するための方法を用いて、農業用自動車の画像情報に基づき、目立つ対象構造(3)が選択され、繰り返し自動車(1)と目立つ対象構造(3)との間の距離(a)が求められ、操縦命令が、対象構造に対応する画像情報から、および自動車と対象構造との間の距離変化から、作り出される自動車を操縦する方法。 (もっと読む)
作業車両
【課題】走行機体に搭載されたエンジンの動力を、油圧式駆動装置を介して左右の走行クローラに伝達するように構成する一方、走行機体の進行方向を変更操作するための操向ハンドルを備える作業車両において、不要であるにも拘らず、操向ハンドルの切り過ぎにて走行機体をスピンターンさせ、圃場を荒らすという問題を解消する。
【解決手段】操向ハンドルを左又は右スピンターン領域に回動操作したときに、操向ハンドルの回動操作に対して抵抗を付与するデテント機構370の作用にて、操向ハンドルの操作感触を「重い」状態にする。
(もっと読む)
コンバイン
【課題】回転式の操向操作具に設けた進路変更手段によって進路変更操作を容易・確実にすると共に、スピン旋回を入り切りさせて誤操作を防止できるものとする。
【解決手段】旋回用の油圧式無段変速装置(40)の回転出力を、モニターを備えた操向操作具(16)の操作によって調節できるように構成する。そして、操向操作具(16)を左右いずれかに回転操作すると回転操作方向側のホイル軸(30)を減速させて旋回し、操向操作具(16)とは別の操作具の操作によってスピン旋回を入りにした状態で操向操作具(16)を更に回転操作すると左右のホイル軸(30,30)を互いに逆回転させてスピン旋回すると共に表示部(22)に操向操作具(16)の回転操作状態を表示するように構成する。更に、操向操作具(16)の回転操作によらずに機体を左右に方向修正することのできる進路変更手段(17)を設ける。
(もっと読む)
等高線に基づいて作成された農作業用作業線に沿って走行位置を明示する表示装置及び農作業方法
【課題】従来、圃場の耕耘は区画の一辺に添うように耕耘した、合理的な方法が主であった。しかし降雨時に水流が発生すると、土壌流失になり、表土を流亡させる原因となっていた。土壌流失を防ぐには等高線耕耘が最も良い方法であり、目視で同一標高作業できることを提供する。
【解決手段】あらかじめ作成しておいた圃場の高低マップデーターをもとにして、等高線をできるだけ直線に近い線として演算し、諸条件を考慮の上表示部に少なくとも現在位置と線と区画を表示して、表示部の線に添って作業することによって、等高線耕耘になるようにし、土壌流失を防止するようにした。
(もっと読む)
農業用管理システム
【課題】多数の圃場の中から正確に農作業をする圃場を識別することができるGPS衛星を利用した管理システムを提供すること。
【解決手段】トラクタ10に設けた電子制御機器(ECU)11は、GPS13からの電波の受信により割り出して得られる各圃場ごとに圃場NOを付与した地図情報上のトラクタの所在する圃場NOを情報端末モニタ画面12に表示できるようにし、トラクタのECUと、該ECUに接続された携帯端末から無線通信により前記圃場NOを含む各種情報を基地局に発信する。携帯端末が基地局へ各種情報を送信する時に自動的に無線通信を開始し、基地局での前記各種情報の受信完了時点で無線通信を自動的に切断する携帯端末の通信制御機構と、前記圃場NOが携帯端末から入力されると、GPSからの電波の受信により割り出した農業機械の圃場識別情報を正しい圃場NO情報に補正してトラクタの情報端末モニタ画面に表示させる指令を基地局に送る圃場識別情報補正制御機構とを備えている。
(もっと読む)
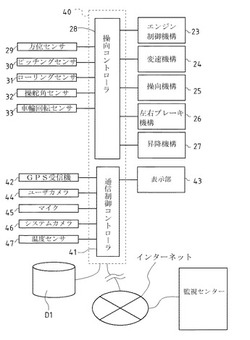
位置情報取得システム
【課題】GPSを利用した位置情報取得システムでありながら、誤差の少ない正確な位置情報の取得を実現できるようにする。
【解決手段】圃場の進入口に配置され且つ識別情報IDを有するRFIDタグ41と、RFIDタグ41の識別情報を読み取るタグリーダ42と、人工衛星STからの電波にて自己の測定位置情報を検出する移動局ユニット43と、RFIDタグ41の基準位置情報を識別情報に対応させて予め記憶した外部サーバ44と、トラクタ1に搭載したコントローラ40とを備える。タグリーダ42と移動局ユニット43とはトラクタ1に搭載する。コントローラ40は、トラクタ1が圃場の進入口にあるときに基準位置情報を外部サーバ44から取得し、このときの測定位置情報と基準位置情報とから補正情報を算出し、補正情報と測定位置情報とに基づいて、トラクタ1の現在の自己位置情報を算出する。
(もっと読む)
作業機
【課題】 圃面の状況の如何にかかわらず走行基準線を確認しながら作業走行を容易に行い得る作業機を提供する。
【解決手段】 所望の走行方向を指し示す走行基準線Xと、その走行基準線Xに沿って進むべき走行機体の現在位置を示す機体標示73とを表示する液晶表示部69を設け、液晶表示部69を運転操縦部に備えてある。
(もっと読む)
農薬散布用ホバークラフト
【課題】水田用ホバークラフトが操縦者から遠く離れた位置にあっても、的確に当該水田用ホバークラフトに対する操縦が実施できる極めて操作性が良い農薬散布用ホバークラフトを提供する。
【解決手段】本発明に係る農薬散布用ホバークラフト1は、ホバークラフト本体2に農薬用タンク3と散布装置6を装着し、遠隔操作によって散布装置6及びホバークラフト本体2を操作可能としたラジコンホバークラフトにおいて、ホバークラフト本体2後部に構成されるファンダクト11の上部に、船艇前方の映像をコントローラ21上のモニタ22に写すためのCCDカメラ13及び障害物に対する設定距離以上の接近を感知しコントローラ21上のスピーカ23から警告音を発生させる超音波センサー装置14を設けた。
(もっと読む)
コンバイン
【課題】回転式の操向操作具に設けた進路変更手段によって進路変更操作を容易・確実にすると共に、スピン旋回を入り切りさせて誤操作を防止できるものとする。
【解決手段】旋回用の油圧式無段変速装置(40)の回転出力を、中央にモニターを備えた操向操作具(16)の操作によって調節できるように構成する。そして、操向操作具(16)を左右いずれかに回転操作すると回転操作方向側のホイル軸(30)を減速させて旋回し、操向操作具(16)とは別の操作具の操作によってスピン旋回を入りにした状態で操向操作具(16)を更に回転操作すると左右のホイル軸(30,30)を互いに逆回転させてスピン旋回すると共に表示部(22)に操向操作具(16)の回転操作状態を表示するように構成する。更に、操向操作具(16)の回転操作によらずに機体を左右に方向修正することのできる進路変更手段(17)を設ける。
(もっと読む)
作業車両
【課題】 複数の自動制御機能を備える作業車両において、作業種別毎にオペレータの好みに応じた自動制御機能の入切設定を可能にする。
【解決手段】 制御装置5は、モード切換手段(モード切換スイッチ14)によって、少なくとも走行モードと作業モードとに移行可能に構成されると共に、当該作業モードにおける作業種別を選択する作業切換手段(作業切換スイッチ19)を備え、走行モードでは、路上走行時において必要としない自動制御機能の制御作動を禁止し、作業モードでは、作業切換手段によって選択された作業種別毎に自動制御機能の設定を可能にすると共に、設定された自動制御機能の制御作動を許可する。
(もっと読む)
作業車両
【課題】 複数の自動制御機能を備えた作業車両において、自動制御機能の設定を間違っても、簡単な操作で既定の設定状態を再現できるようにする。
【解決手段】 制御装置5は、モード切換手段によって、走行モード、作業モード及び設定モードに移行可能に構成され、走行モードでは、路上走行時において必要としない自動制御機能の制御作動を禁止し、作業モードでは、作業走行時において必要とする自動制御機能の設定を可能にすると共に、設定された自動制御機能の制御作動を許可し、設定モードでは、作業モードにおける自動制御機能の設定を、予め設定された既定値に戻すように構成される。
(もっと読む)
コンバイン
【課題】路上走行における機体の旋回に際して、オペレータの操作負荷の軽減を図りつつ、適切なタイミングで確実に方向表示手段の動作制御を可能とするコンバインを提供する。
【解決手段】コンバインは、左右の走行部1により走行可能に支持された機体と、その左右の走行部1の速度差を操向操作具11aの操作と対応して調節する旋回手段と、機体の旋回方向表示のための方向表示操作具11bによる表示操作と対応して左右いずれかの方向表示動作を開始する方向表示手段7,8とを備えて構成され、上記方向表示手段7,8には方向表示の開始と停止とを制御する制御部21を設け、この制御部21は、上記操向操作具11aの左右の操作方向を判別し、この左右の操作方向に対して方向表示が逆方向となることを条件に表示動作を停止制御するものである。
(もっと読む)
水田作業機の指標形成マーカ操作構造
【課題】 次の作業行程における走行基準となる指標を田面に形成する左右一対の指標形成マーカをそれぞれ出退操作可能に備えるとともに、各指標形成マーカの突出作動指令を出すマーカ選択手段を備えた水田作業機のマーカ操作構造において、マーカ選択操作を誤っても速やかに修正操作を行って作業に移行することができるようにする。
【解決手段】 前回のマーカ突出作動方向を記憶する記憶手段と、記憶されている前回のマーカ突出作動方向と今回の突出作動指令によるマーカ突出作動方向との相違を判断する判断手段と、記憶されている前回のマーカ突出作動方向と今回の突出作動指令によるマーカ突出作動方向とが同一であることが判断されると作動する報知手段とを備えてある。
(もっと読む)
コンバイン
【課題】回転式の操向操作具に設けた進路変更手段によって進路変更操作を容易・確実にすると共に、スピン旋回を入り切りさせて誤操作を防止できるものとする。
【解決手段】旋回用の油圧式無段変速装置(40)の回転出力を操向操作具(16)の操作によって調節できるように構成する。そして、操向操作具(16)を左右いずれかに回転操作すると回転操作方向側のホイル軸(30)を減速させて旋回し、操向操作具(16)とは別の操作具の操作によってスピン旋回を入りにした状態で操向操作具(16)を更に回転操作すると左右のホイル軸(30,30)を互いに逆回転させてスピン旋回すると共に表示部(22)に操向操作具(16)の回転操作状態を表示するように構成する。更に、操向操作具(16)の回転操作によらずに機体を左右に方向修正することのできる進路変更手段(17)を設ける。
(もっと読む)
作業機の副変速装置
【課題】 現在の副変速状態が一目瞭然でわかるようにするとともに、作業機の始動時や作業中の安全性の向上を図った作業機の副変速装置を提供することを課題とする。
【解決手段】 エンジンからの動力で駆動する可変容積型の油圧ポンプ91と、駆動輪を駆動する可変容積型の第1油圧モータ92と固定容量型の第2油圧モータ93と、を油圧閉回路94で連結した走行用HST式変速装置9と、主変速を行う主変速レバー2のグリップ部20に設けられて、押されるごとに順繰りに第1油圧モータ92の速比を切り換えて副変速状態を切り換える副変速スイッチ27と、を備えた作業機の副変速装置において、前記副変速状態を表示する表示手段としての表示パネル6が操向ハンドル5の中央に設けられた構成とする。
(もっと読む)
コンバイン
【課題】 倒伏穀稈状況における自動方向制御の不安定化。
【解決手段】 左右一対のクローラ3を有する走行装置2と、前記走行装置2の前方に設けた圃場の穀稈を刈取搬送する刈取部5とを有し、該刈取部5は、圃場の株列Kと株列Kの間の株間を各分草体10が通るように、自動方向制御機構Sにより方向修正しながら走行するように構成し、前記自動方向制御機構Sは、前記脱穀装置4あるいはグレンタンク6等の任意の機体後部に設けた後方撮影機材15による撮影した画像により、前記刈取部5が既に切断した穀稈の株列Kを認識し、この株列Kと機体とのずれを検出して方向制御を行うように構成したコンバイン。
(もっと読む)
21 - 38 / 38
[ Back to top ]