
Fターム[2B076DC01]の内容
収穫機本体(機枠、駆動) (12,770) | 駆動機構の操作装置 (533) | レバー (336)
Fターム[2B076DC01]に分類される特許
101 - 120 / 336
走行車両
【課題】走行機体に搭載されたエンジンの動力を変速する直進用及び旋回用変速機53,54と、直進用変速機53に対する直進操作具と、旋回用変速機54の旋回操作具とを備えている走行車両において、操作系統の簡素化及び操作性の向上を図る。
【解決手段】互いに直交する旋回軸線及び変速軸線回りに回動可能な制御体を備える。旋回操作具の操作に伴う制御体の旋回軸線回りの正逆回動にて旋回用変速機54を作動させる一方、直進操作具の操作に伴う制御体の変速軸線回りの正逆回動にて直進用変速機53を作動させるように構成する。制御体は、各変速機53,54からの出力を左右の走行部に伝達するミッションケース18に内蔵する。
(もっと読む)
コンバインの走行制御装置

【課題】枕地での旋回の際にも脱穀装置を適正に駆動し、しかも、枕地での旋回を走行用の駆動力の不足を避けた状態で適切に行えるコンバインの走行制御装置を提供する。
【解決手段】走行用の静油圧式無段変速装置7の油圧モータ7Mにおける容量変更用の操作部7Maを設定目標位置に維持させるように、その操作部7Maが低速側に移動するのを高速側に移動操作する操作力にて保持する保持手段56の操作力を変更調整する操作力調整手段58作動を制御する操作力調整処理を実行する制御手段79が、刈取作業状態検出手段Uにて刈取作業状態から非刈取作業状態切り換ったことが検出されたのちにおいては、操作部7Maが設定目標位置よりも低速側に移動しても、刈取処理直後用の設定上限値を超えて保持手段56の操作力を増加させない形態にて操作力調整手段58の作動を制御する刈取処理直後用の操作力調整処理を実行するように構成されている。
(もっと読む)
コンバイン
【課題】センサにより旋回機構の異常を検出しても、作業者が旋回機構の異常を認識しないで作業することがある。
【解決手段】コンバインは、左右の車軸51の回転に回転差を発生させて旋回する無段階に変速可能な走行装置3と、走行装置3の操向レバー75の操作位置を検出する操向レバー位置検出手段76と、前記左右の車軸51の夫々の回転数を検出する回転検出手段78とを有する。制御コントローラ79の旋回制御異常検出手段80は、検出した左右の車軸51の回転差と、前記操向レバー75の傾倒操作角度とを対比して、旋回制御異常検出手段80で旋回制御の異常を検出し、該旋回制御異常検出手段80が異常と判定すると、異常を報知手段81により報知する。
(もっと読む)
コンバインの操作装置
【課題】コンバインの高速走行時の刈取作業を牽制する装置において、部品点数を減らしたコンパクトな構成とする。
【解決手段】変速レバー側第2アーム(16d)と刈取クラッチレバー側第2アーム(17d)の何れか一方を牽制ロッド(19)の前後一端側に形成した長孔(19a)に係合し、何れか他方を牽制ロッド(19)の前後他端側にピン連結し、変速レバー(16)を高速変速位置(16a)に操作した状態では、刈取クラッチレバー(17)をクラッチ切り位置(17a)からクラッチ入り位置(17b)に操作できないように牽制される構成とする。
(もっと読む)
コンバイン
【課題】本発明は圃場から作業者がエンジン停止をし易いコンバインを提供するものである。
【解決手段】走行機体の前部に植立穀稈を刈取る刈取り部を昇降自在に備えるとともに、機体の右又は左側に備えられた搭乗運転部4の前部に操縦パネル18を配設したコンバインにおいて、操縦パネル18の上部における乗降口33側寄りにキースイッチ35を配設するとともに、キースイッチ35に対して左右方向で乗降口33とは反対側に操向操作を司る操向操作具19を配設してある。
(もっと読む)
刈取収穫機
【課題】刈取収穫機において静油圧式無段変速装置を備えた場合、駆動力(トルク)の低下を避けながら、機体の走行速度を低速にすることができるように構成する。
【解決手段】エンジン6の動力が伝達される静油圧式無段変速装置7を備え、静油圧式無段変速装置7の油圧モータ7Mを変速自在に構成する。静油圧式無段変速装置7の油圧モータ7Mの動力を走行伝動系及び刈取伝動系に並列的に分岐させて、走行伝動系の動力を走行装置に伝達するように構成する。刈取伝動系の動力を刈取部2に伝達するように構成して、刈取伝動系に刈取変速装置18を備える。
(もっと読む)
作業車
【課題】従来より備えられる手動操作式の指令手段を有効利用して、構成の複雑化を招くことなく、旋回操作位置検出手段が異常であるときにも旋回を行えるようにすることが可能な作業車を提供する。
【解決手段】旋回操作具77の操作位置を検出する旋回操作位置検出手段80の検出値が設定適正範囲内である正常動作状態であるか前記適正出力範囲外である異常状態であるかを判別して、前記正常動作状態であると判別した場合には、旋回操作位置検出手段80の検出値に基づいて旋回制御を実行し、且つ、前記異常状態であると判別した場合には、旋回操作位置検出手段80の指令情報に基づく旋回制御の実行を停止して、被制御対象用指令手段の指令情報、及び、その指令情報と操作すべき旋回状態との関係を定めた旋回操作関係情報に基づいて、旋回操作手段57を制御する代替旋回制御を実行する。
(もっと読む)
作業車の旋回制御装置
【課題】摩擦式油圧クラッチを兼用することにより走行駆動手段の構成の簡素化を図り、併せて、適切にブレーキ旋回状態を現出させることが可能となる作業車の旋回制御装置を提供する。
【解決手段】走行駆動手段が逆転クラッチの操作圧を変更することにより、ブレーキ旋回状態と逆転旋回状態とに切り換え自在に構成され、前記逆転旋回状態が指令されると、摩擦式油圧クラッチの操作圧を逆転旋回用操作圧にし且つブレーキ旋回状態が指令されるとブレーキ旋回用操作圧に調整するブレーキ旋回用処理を実行し、且つ、ブレーキ旋回状態の指令に切り換えられた直後においては、予め設定された初期操作圧を目標操作圧として設定し、その後は、ブレーキ旋回状態であると判別されるまで、初期操作圧から圧力を変更させた補正操作圧を目標操作圧として設定して、摩擦式油圧クラッチの操作圧を調整する。
(もっと読む)
コンバインの変速制御装置
【課題】走行装置が走行しているのにも拘わらず故障等により実走行速度検出手段が零を出力することがあっても、走行連係変速処理によって刈取処理装置を駆動することが可能なコンバインの変速制御装置を提供する点にある。
【解決手段】走行装置と一体回転する回転体に検出作用して前記走行装置の走行速度を検出する実走行速度検出手段26の検出情報に基づいて、刈取処理装置の駆動速度を走行装置の走行速度が高速となるほど高速にする関係にて定めた設定関係速度にするように変速手段を変速操作する走行連係変速処理を実行する変速制御手段Hが、実走行速度検出手段26にて検出される走行速度が零のときには、走行変速操作具24にて指令されて目標速度検出手段25にて検出される目標走行速度を走行速度として、走行連係変速処理を実行するように構成されている。
(もっと読む)
コンバイン
【課題】操作具設置部への支持形態を考慮することによって、操作具の操作性の悪化を抑制できる運転部を備えたコンバインを提供する。
【解決手段】機体に備えられた静油圧式無段変速装置43を変速操作する変速レバー40を備えた操作具設置部を運転部8に装備する。運転部8を、静油圧式無段変速装置43を覆う閉じ状態と、静油圧式無段変速装置43との連係を断った状態で機体外方に移動して静油圧式無段変速装置43を開放した開き状態に回動切り換え自在に構成する。閉じ状態において、操作具設置部を機体から延出した受けフレーム99に載置させるべく構成してある。
(もっと読む)
刈取収穫機
【課題】刈取収穫機において、走行用の変速装置を移動走行用の高速位置、刈取作業用の中速位置、及び倒伏が激しい作物を刈り取る倒伏刈取作業用の低速位置に操作自在に構成した場合、刈取部用の変速装置を適切に連係させる。
【解決手段】走行用の変速装置7Mが高速位置に操作された移動走行状態と、走行用の変速装置7Mが中速位置に操作され且つ刈取部用の変速装置18が低速位置に操作された標準刈取状態と、走行用の変速装置7Mが低速位置に操作され且つ刈取部用の変速装置18が高速位置に操作された低速刈取状態とを設定する。人為操作具87,88により移動走行状態、標準刈取状態、低速刈取状態を設定可能に構成する。
(もっと読む)
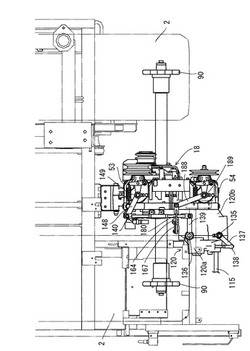
コンバイン
【課題】エンジン17の動力を、左右の走行部2に伝達する直進用変速機53及び左右の走行部に逆回転して伝達する旋回用変速機54と、前記直進用変速機の直進手動操作具13と、前記旋回用変速機の旋回用手動操作具10とを備えている走行車両において、その旋回操作機構の簡素化及び旋回操作性能の向上を図る。
【解決手段】直交する2つの軸線P、S回りに回動可能な制御体131を備え、この制御体は、前記旋回用手動操作具の旋回操作に伴う前記第1軸線P回りの正逆回動にて前記旋回用変速機を、旋回連動機構180を介して旋回作動させ、前記直進用手動操作具の変速操作に伴う前記第2軸線S回りの正逆回動にて前記直進用変速機を変速作動させるように構成され、前記旋回連動機構には、前記旋回用変速機を旋回作動する電動モータ193を備えている。
(もっと読む)
コンバインの操縦装置
【課題】構成の簡易化により、生産コストを改善することができるコンバインの操縦装置を提供する。
【解決手段】コンバインの操縦装置は、操縦席の前部に配置した左右の傾動操作が可能な操舵レバー3と、この操舵レバー3と一体構成でその操作力を昇圧スプール軸14に受けるリリーフバルブ4とを備え、このリリーフバルブ4によって油圧制御されるサイドクラッチ機構を介して左右の走行動力を断接制御可能に構成され、上記操舵レバー3の下方のフロア5には、踏込み操作が可能な掻込ペダル6を設け、この掻込ペダル6の踏込力を伝えるケーブル7を上記昇圧スプール軸14と連結して上記サイドクラッチ機構により左右の走行動力を同時に断接制御可能に構成したものである。
(もっと読む)
コンバイン
【課題】急停止に伴う作業者の前後移動による主変速レバーを誤操作防止。
【解決手段】走行用静油圧式無段変速装置12により走行速度を無段階に変速可能な走行装置3の前方に刈取部4を設け、前記刈取部4は前記無段変速装置12の主変速レバー13の傾倒操作により変速された走行速度に同調して変速駆動する構成とし、前記主変速レバー13の中立操作または操縦部6に設けた駐車ブレーキペダル55の踏み込み操作による走行装置3の停止操作によって、前記走行用静油圧式無段変速装置12を減速制御して機体が停止するようにし、機体が停止する直前に、走行装置3に回転伝達するミッションケース18の左右サイドクラッチ60を自動的に所定時間「切り」にするように構成したコンバイン。
(もっと読む)
コンバイン
【課題】路上用の高速走行域や刈取作業に適した中速走行域の他に倒伏茎稈の刈取作業に適した低速走行域をも選択可能な操作具を、誤操作の可能性が少なく、配設スペースも少なくて済むようにしたコンバインを得る。
【解決手段】静油圧式無段変速装置4を構成する油圧ポンプ41と油圧モータ42とを、ともに可変容量型に構成し、油圧モータ42による速度制御域に、路上での走行に適した高速走行域と、圃場での植立茎稈の刈取作業に適した中速走行域と、中速走行域での走行速度よりも低速で倒伏茎稈の刈取作業に適した低速走行域とを設定し、高速走行域と中速走行域とを択一的に切換操作する第1操作具23と、中速走行域と低速走行域とを択一的に切換操作する第2操作具24とを、各別に操作自在に備えた。
(もっと読む)
コンバイン
【課題】刈取部への同調させる走行速度と、移動速度との切替等の走行操作の不便性、作業性の低下。
【解決手段】無段階に変速可能な走行装置3の前方に刈取部4を設け、走行装置3の上方に脱穀装置2を設ける。刈取部4は、走行装置3の無段変速装置12の油圧ポンプ14のポンプ斜板15の傾斜角度を調節する主変速レバー13の傾倒操作により、走行速度に同調して変速駆動する構成とする。前記無段変速装置12の油圧モータ16のモータ斜板17の傾斜角度は通常走行側と高速走行側とへ切替可能に構成する。モータ斜板17の傾斜角度が低速走行側に切替えられた状態で、前記主変速レバー13が最高速位置に操作されたときの車速を変更調節する速度調整ダイヤル51を設ける。
(もっと読む)
コンバインの排藁結束装置
【課題】脱穀部から排藁搬送装置を介して搬送される排藁の株元を揃える根揃え板を備えたコンバインにおいて、脱穀部に投入される前に既に折れ曲がった状態にある倒伏材の株元と根揃え板との当接により、稈姿勢の乱れを伴った結束ミスや詰まりが誘発されることを防止する。
【解決手段】根揃え板移動装置73による根揃え板71の排藁の稈身方向への移動制御を、株元検知手段97による検出結果に基づいて根揃え板71を適正な根揃え位置に合わせる通常制御モードと、前記株元検知手段97よる検出結果に拘らず、当該根揃え板71を排藁の株元から離間する方向に強制的に移動させる倒伏材制御モードとに切換え可能に構成するにあたり、前記通常制御モードと倒伏材制御モードの切換えを、前処理部4の動作速度を増速する既存の操作手段35の増速操作に連動させて行えるように構成した。
(もっと読む)
コンバイン
【課題】畦際等の走行停止態の刈取作業中の不意な走行。
【解決手段】走行用静油圧式無段変速装置12により走行速度を無段階に変速可能な走行装置3の前方に、刈取搬送用静油圧式無段変速装置21により作業回転数を無段階に変速可能な刈取部4を設け、走行装置3の上方には脱穀装置2を設け、前記刈取部4は、操縦部6に設けた前記走行用無段変速装置12の主変速レバー13の傾倒操作により変速された走行速度に同調して刈取搬送用無段変速装置21が変速駆動する構成とし、前記操縦部6には、走行用無段変速装置12による走行装置3の走行を停止させた状態で、刈取部4を駆動させる刈取駆動入切手段53を設けたコンバイン。
(もっと読む)
作業車両の操縦装置
【課題】操向レバーの旋回操作を制御装置に入力するポジションセンサの故障をいち早く検出して警報を出したり旋回を中止することで安全性を高める。
【解決手段】操向レバー(1)の左右傾倒角度を検出するポジションセンサ(2)と、該ポジションセンサ(2)とは別に操向レバー(1)の左右傾倒状態を検出する左右の旋回スイッチ(3a,3b)を設け、前記ポジションセンサ(2)と旋回スイッチ(3a,3b)の検出値が一致しない場合を故障と判断し、警報或いは走行停止を実行する構成とした。
(もっと読む)
コンバイン
【課題】穀稈供給搬送装置の搬送速度と扱胴の回転とのアンバランスによる脱穀不良。
【解決手段】走行装置3の前方に刈取部4を、走行装置3の上方に脱穀装置2を夫々設け、前記刈取部4で刈り取った穀稈の株元側を挟持して脱穀装置2の脱穀室に供給しながら搬送する穀稈供給搬送装置12の始端側に、シンクロ用前側供給搬送装置13を設け、前記穀稈供給搬送装置12には脱穀装置2の扱胴34と共にエンジン22からの一定回転を伝達し、前記シンクロ用前側供給搬送装置13および前記刈取部4は走行速度に同調して回転数を増減させる専用の刈取搬送用無段変速装置21により変速駆動する構成とし、該刈取搬送用無段変速装置21は、前記エンジン22の回転を前記扱胴34および穀稈供給搬送装置12に分岐して伝達するギヤケース50の機体内側の部位取り付けたことを特徴とするコンバイン。
(もっと読む)
101 - 120 / 336
[ Back to top ]