
Fターム[2B076EC23]の内容
収穫機本体(機枠、駆動) (12,770) | 検出対象 (874) | その他の検出対象 (247)
Fターム[2B076EC23]に分類される特許
161 - 180 / 247
コンバイン
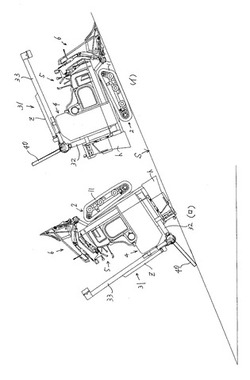
【課題】機体を転倒しにくくして安全性を向上させると共に、コンバインの倉庫への格納や保護シートを被せる作業を容易に行なえるものとして作業能率を向上させる。
【解決手段】第1に、穀粒貯留装置(4)に旋回自在な穀粒排出装置(31)を設け、該穀粒排出装置(31)に、作用姿勢と非作用姿勢とに切換自在な機体転倒防止用の支持部材(40)を設ける。第2に、支持部材(40)を穀粒排出装置(31)の上部に対して起伏回動自在に取り付ける。第3に、支持部材(40)を穀粒排出装置(31)の上部に対して横方向回動自在に取り付ける。第4に、機体の傾斜角度が設定角度を越えた場合に、前記支持部材(40)を自動的に作用姿勢に切り換える構成とする。
(もっと読む)
走行車両

【課題】走行機体に搭載されたエンジンの動力を、油圧無段変速機50を介して左右の走行部に伝達するように構成され、左右の走行クローラに対する走行機体の相対高さを変更調節する左右の車高調節機構と、主変速レバー13と、操向ハンドル10とを備えた走行車両において、動力損失を大幅に低減できるようにする。
【解決手段】油圧無段変速機50の変速出力を調節する電動モータ151,161と、コントローラ170と、複数の変速出力パターンを予め記憶させたPROM172とを備える。コントローラ170は、操向位置センサ117、主変速位置センサ135及び副変速位置センサ145の検出情報と、走行機体1の車高及び基準高さの関係に対応して選択された変速出力パターンに基づき、直進電動モータ151及び旋回電動モータ161を作動させて走行機体1の車速及び進行方向を調節するという変速操向制御を実行する。
(もっと読む)
走行車両
【課題】走行機体に搭載されたエンジンの動力を、油圧無段変速機50を介して左右の走行部に伝達するように構成され、走行機体の直進速度を変更操作する主変速レバー13と、走行機体の進行方向を変更操作する操向ハンドル10とを備えている走行車両において、動力損失を大幅に低減できるようにする。
【解決手段】油圧無段変速機50の変速出力を調節する電動モータ151,161と、電動モータ151,161の駆動を制御するコントローラ170と、変速出力パターンを予め記憶させたPROM172とを備える。コントローラ170は、左右の走行クローラの速度が操向位置センサ117及び主変速位置センサ135の検出情報と、変速出力パターンとから得られた値になるように、直進電動モータ151及び旋回電動モータ161を駆動させて油圧無段変速機50の変速出力を調節する。
(もっと読む)
走行車両
【課題】走行機体に搭載されたエンジンの動力を、油圧無段変速機50を介して左右の走行部に伝達するように構成され、主変速レバー13と操向ハンドル10と副変速レバー14とを備えた走行車両において、動力損失を大幅に低減できるようにする。
【解決手段】油圧無段変速機50の変速出力を調節する電動モータ151,161と、電動モータ151,161の駆動を制御するコントローラ170と、変速出力パターンを予め記憶させたPROM172とを備える。コントローラ170は、左右の走行クローラの速度が操向位置センサ117及び主変速位置センサ135の検出情報と副変速レバー14の操作状態に対応して選択された変速出力パターンとから得られた値になるように、直進電動モータ151及び旋回電動モータ161を駆動させて油圧無段変速機50の変速出力を調節する。
(もっと読む)
コンバイン
【課題】刈取部を駆動したままで高速走行して刈取部が過回転して破損するような事態を招きにくくする。
【解決手段】第1の手段として、刈取部への動力伝達を断続する刈取クラッチの接続状態を検出する刈取クラッチセンサ37を設け、刈取クラッチセンサ37によって刈取クラッチの接続状態が検出された場合に、走行変速操作具の高速側への操作を規制するか若しくは走行変速操作具を高速側へ操作してもこの走行変速操作具の操作を無効とする制御手段を設ける。第2の手段として、刈取部への動力伝達を断続する刈取クラッチの接続状態を検出する刈取クラッチセンサ37を設け、刈取クラッチセンサ37によって刈取クラッチの接続状態が検出され、且つ走行変速操作具が高速側へ操作された場合に刈取クラッチを強制的に遮断する制御手段を設ける。
(もっと読む)
芝刈機
【課題】芝刈り機構と、芝刈り機構にて刈り取った刈草を受け入れる集草ボックス18と、集草ボックス18を持ち上げるためのリフト機構19とを備えている芝刈機において、芝刈り機構の駆動中に集草ボックス18を誤って上昇させたり、集草ボックス18が上げ位置にあるときに芝刈り機構を駆動させたりして、刈草等を撒き散らすおそれを解消する。
【解決手段】リフト機構19に、集草ボックス18の昇降動に連動して突出姿勢と収納姿勢とに姿勢変更動可能なアウトリガー45を取り付ける。更に、PTO操作レバー52の入り切り操作状態を検出するためのPTO入りセンサ151と、アウトリガー45の姿勢を検出するためのアウトリガーセンサ155とを備える。アウトリガーが地面に向けて突出した突出姿勢であり且つPTO操作レバー52が入り状態であれば、エンジン停止機構としてのエンジン停止ソレノイド152が作動するように構成する。
(もっと読む)
作業車両の制御装置
【課題】作業車両のモニタ表示器において、作業走行状態のモニタ表示からメンテナンス表示、モニタ表示器のコントラスト調整に迅速に移行させ、操作性の向上によって作業能率を高める。
【解決手段】表示切換スイッチ(SW1)の入り操作により、モニタ表示器(12)の表示画面を順次切り換え、スイッチ(SW2)の入り操作でメンテナンスモードを選択し、表示切換スイッチ(SW1)の入り操作でメンテナンスモードの表示画面を順次切り換え、スイッチ(SW2)の入り操作でコントラスト調整モードを選択し、表示切換スイッチ(SW1)の入り操作でコントラスト調整モードの表示画面を順次切り換えるように前記モニタ表示制御コントローラ(C1)を構成する。
(もっと読む)
コンバイン
【課題】走行機体に対して左右の走行装置をそれぞれ独立して昇降させる左右一対の走行部昇降装置を備え、前記走行機体の左右方向の傾斜調整を行い得るコンバインにおいて、排出オーガによる排出作業時に排出不良を防止し、安定した排出作業を行うことができるコンバインを提供する。
【解決手段】自動制御モード実行時且つオーガ検出センサ492からの信号に基づき排出オーガ7が格納位置から外れたと判断された場合、制御装置400により、左右一対の走行装置10の少なくとも何れか一方が走行機体2に対して最接近する(最下限位置となる)まで左右一対の走行部昇降装置がともに近接方向に作動する(車高を下げる)。そして、左右一対の走行装置10の少なくとも何れか一方が走行機体2に対して最接近した状態で、傾斜検出センサ450により検出される傾斜角度に応じて、制御装置400が走行機体2を水平角に自動制御する下限水平制御が行われる。
(もっと読む)
農業機械用の制御装置
【課題】スイッチやセンサを追加しなくても、操作具やセンサに不具合が生じたとき、対応するアクチュエータを動作させることができるようにする。
【解決手段】制御装置31は、通常、操作具の操作信号やセンサの検出信号に応じて、対応するアクチュエータを動作させるように構成されるが、農作業に関与する操作具やセンサに不具合が生じたとき、農作業に関与しない方向指示器スイッチ26L、26Rの操作を検出すると共に、該方向指示器スイッチ26L、26Rの操作に応じて前記不具合が生じた操作具やセンサに対応するアクチュエータを動作させる制御モード(非常モード)を備えている。
(もっと読む)
刈取収穫機の刈取昇降制御装置
【課題】 刈取部が水平基準面に対して傾斜しながら刈取走行する場合であっても、刈取部が地面に接触することを回避することが可能となる刈取収穫機の刈取昇降制御装置を提供する。
【解決手段】 刈取部の対地高さが目標対地高さになるように昇降操作手段C1を制御する刈取昇降制御、並びに、刈取部の水平基準面に対する傾斜角が目標傾斜角に維持されるように姿勢変更操作手段の作動を制御する姿勢制御を実行する制御手段Hが、刈取昇降制御として、目標傾斜角設定手段50にて設定された目標傾斜角が、刈取部が水平姿勢又はそれに近い姿勢に対応する設定範囲を外れている場合には、刈取部が目標傾斜角になったと仮定したときに、下位側に位置する対地高さ検出手段Aについての目標対地高さとして、目標対地高さ設定手段54にて設定された目標対地高さを設定量高い側に補正した補正目標対地高さを定める目標高さ補正処理を実行する。
(もっと読む)
コンバインの情報表示装置
【課題】コンバインによる作業工程に沿って、状況変化の際に対応遅れを招くことなく、それぞれの的確な作業により全体としての作業性を向上することができるコンバインの情報表示装置を提供する。
【解決手段】コンバインの情報表示装置は、複数の切換用スイッチにより表示画面の切換えが可能なモニター表示部11を備え、このモニター表示部11には、少なくともエンジン負荷と穀粒貯留量と車速により作業状態を表示する通常画面21を備えたコンバインの情報表示装置において、上記モニター表示部11には、車高調節状態を表示する車高表示画面22を別途備え、所定の切換用スイッチ15の操作によって上記通常画面21から車高表示画面22への画面切換えを可能に構成したものである。
(もっと読む)
走行車両
【課題】四輪自動車と同じような操作感覚で運転(操縦)可能なコンバインにおいて、主変速レバーと操向ハンドルとを直進用及び旋回用油圧駆動装置に連動連結するための機構を簡素化する。
【解決手段】主変速レバー73の傾動操作量に応じて操向入力軸87上をスライド移動する直進用スライダ111と、操向ハンドル10の回動操作量に応じて操向入力軸87上をスライド移動する旋回用スライダ112と、各スライダ111,112のスライド位置を検出する位置検出手段127,128と、各位置検出手段127,128の検出情報に基づいて各電動モータ141,142を駆動させるコントローラ102とを備える。
(もっと読む)
コンバイン
【課題】複雑な操作方法を覚えることなく、直感的な操作で刈高自動制御を一時的に解除して、前処理部の下降や上昇を行えるようにする。
【解決手段】機体前部に昇降自在に連結される前処理部2と、前処理部2の昇降操作を行うマルチステアリングレバー13と、前処理部2の位置をダイヤル位置に維持する刈高自動制御機能とを備えるコンバイン1において、刈高自動制御中にマルチステアリングレバー13が下降操作されたとき、前処理部2をダイヤル位置を越えて下降させると共に、下降操作終了後、所定の時間が経過したら、前処理部2をダイヤル位置に復帰させる。
(もっと読む)
コンバイン
【課題】刈取部を実際の機体の姿勢に即した昇降位置に速やかに昇降させて、該刈取部の地面への突っ込みや高刈りを確実に防止する。
【解決手段】機体に昇降制御可能に支持した刈取部4と、該刈取部4を昇降手段により昇降制御する制御手段30とを備えるコンバイン1において、前記機体の水平基準面に対する前後傾斜角度を検出する傾斜角検出手段32と、前記機体のピッチングの角速度を検出する角速度検出手段33と、前記刈取部4の機体に対する昇降位置を検出する昇降位置検出手段35とを備え、前記制御手段30により傾斜角検出手段32の検出値と角速度検出手段33の検出値とに基づいて検出後の機体の姿勢を予測し、その予測結果に応じて設定した予測昇降位置まで前記刈取部4を昇降させる昇降制御を行う。
(もっと読む)
作業車両の警報装置
【課題】周囲の者やオペレータに、不快感を与えることなく異常を知らせることができる作業車両の警報装置を提供することを課題としている。
【解決手段】作業中の作動部の異常を検出する検出手段17,18,19,21,22,23,24と、警告音を鳴動させる報知手段12と、検出手段17,18,19,21,22,23,24によって異常が検出されると報知手段12により警告音を鳴動させる制御部14とを備えた作業車両の警報装置において、前記報知手段12よりも小音量の警告音を鳴動させる小音量報知手段13を設け、制御部14が、前記検出手段17,18,19,21,22,23,24による作動部の異常検出後の機器類の特定の作動条件又は作業条件に対応して前記報知手段12による警告音の鳴動を停止させて前記小音量報知手段13による警告音のみを鳴動させる。
(もっと読む)
農作業機
【課題】キーを不正に入手される等により、盗難警報設定時間内に農作業機が盗難されそうになった場合、遠隔地にいてもその発生を検知することができ、即時に追跡等が行えるために盗難を未然に防止できる農作業機を提供する。
【解決手段】携帯端末20と通信する通信手段32を備える農作業機30において、機体の位置情報を検知する位置情報検知手段(GPS)38と、エンジンの始動状態を検知するエンジン始動状態検知手段46と、前記携帯端末20から受け付けた盗難警報設定時間情報に基づいて盗難警報設定時間を設定し、エンジンが始動したときに、盗難警報設定時間内であるか否かを判断する設定時間制御手段34とを備え、該設定時間制御手段34で盗難警報設定時間内であると判断された場合、そのとき検知された前記位置情報を前記携帯端末20に送信することとした。
(もっと読む)
コンバイン
【課題】グレンタンクに収穫穀物が貯留され、直進性が低下した場合に、走行方向を修正する操向制御手段を具備するコンバインを提供する。
【解決手段】走行機体の左右どちらか一方にグレンタンク15を具備するコンバインにおいて、作業時に、グレンタンク15の重量を検知して、その重量に応じて操向手段を駆動して、直進するように操向制御手段150を具備した。また、前記操向制御手段は、左右のクローラの回転数を変更することにより行う。
(もっと読む)
収穫機
【課題】圃場の作物の性状又は収穫作物の性状等に適応した最適な回転数で搬送手段を作動でき、収穫作業性を向上できるようにした収穫機を提供するものである。
【解決手段】走行部2を備えた走行機体と、収穫作物を搬送する複数の搬送手段6,223,224,234とを備えてなる収穫機において、前記複数の搬送手段6,223,224,234毎に、それら搬送手段6,223,224,234を作動する複数の電動モータ90,92,93,94を備え、各電動モータ90,92,93,94によって各搬送手段6,223,224,234を個別にそれぞれ作動するように構成したものである。
(もっと読む)
作業車両
【課題】電源のON操作を携帯電話により操作することでキーの抜き忘れや所持すること自体の忘れを防ぐことができ、さらに、遠隔操作することによって盗難を防止することができる作業車両を提供する。
【解決手段】携帯端末120と通信する通信手段132と、携帯端末120から受け付けた認証コードに基づいて認証処理を行うコード認証手段146を備えた作業車両130であって、電源149のON/OFFを制御する制御手段を備え、前記コード認証手段146が前記携帯端末120からの認証コードを認証すると、前記電源149がONされる構成とした。
(もっと読む)
コンバインの刈取装置
【課題】刈取部のみ左右移動させて条合せを行い安定した直進走行をすることができ、クローラにて未刈り穀稈を踏んでしまうことを防止するコンバインの刈取装置を提供する。
【解決手段】刈取部8を機体に対して左右方向にスライド可能に支持させるコンバインの刈取装置において、前記刈取部8の分草板24・24・24の先端近傍に未刈り穀稈91を検出する穀稈検出センサ100・101・105・106を配置し、該穀稈検出センサ100・101・105・106の検出に基づいてスライドアクチュエーター46を作動させて自動で条合せを行う自動制御手段を具備したものである。
(もっと読む)
161 - 180 / 247
[ Back to top ]