
Fターム[2B076EC23]の内容
収穫機本体(機枠、駆動) (12,770) | 検出対象 (874) | その他の検出対象 (247)
Fターム[2B076EC23]に分類される特許
101 - 120 / 247
コンバイン
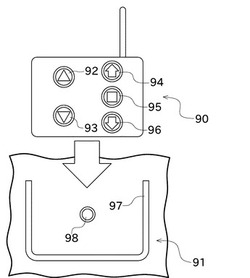
【課題】手扱ぎ作業時に、機体の操作を行うことが可能であるとともに、誤操作を防止することができるコンバインを提供する。
【解決手段】コンバインは、エンジンを搭載した走行機体と、刈取部と、脱穀装置と、リモートコントローラ90と、コントローラ装着部91と、機能切替スイッチ98と、を備える。リモートコントローラ90は、走行機体の前進操作及び後進操作が少なくとも可能である。コントローラ装着部91は、リモートコントローラ90を着脱可能に装着可能である。機能切替スイッチ98は、リモートコントローラ90がコントローラ装着部91に装着されたことを検出する。そして、リモートコントローラ90による操作は、当該リモートコントローラ90がコントローラ装着部91に装着されたことを機能切替スイッチ98が押されることで検出した場合にのみ有効となる。
(もっと読む)
刈取収穫機

【課題】走行機体に刈取部が上昇非作業高さと下降作業高さとに昇降操作自在に連結され、走行機体の走行装置を変速駆動する走行変速装置を備えた刈取収穫機において、刈取部の接地トラブルを回避しながら高速移動されるようにする。
【解決手段】刈取部の走行機体に対する連結高さを検出する連結高さセンサ61、走行変速装置7が設定低速位置から増速操作されることを牽制する牽制作用状態と、走行変速装置が設定低速位置から増速操作されることを許容する牽制解除状態とに切り換え自在な変速牽制手段77を備えてある。刈取部が設定連結高さより高い連結高さに位置する状態において変速牽制手段77が牽制解除状態に切り換わり、刈取部が設定連結高さ以下に位置する状態において変速牽制手段77が牽制作用状態に切り換わる。
(もっと読む)
コンバイン
【課題】排気ガスの浄化処理を実行可能で、且つ、収穫作業の最中に尿素水の補給をしなくて済むようにしたコンバインを提供する。
【解決手段】本願発明のコンバインは、脱穀装置を駆動させるディーゼルエンジンと、脱穀装置への動力伝達を継断する脱穀クラッチ93と、脱穀クラッチ93の入り作動を禁止する脱穀駆動回路118とを備える。更に、ディーゼルエンジンからの排気ガス中にあるNOxの還元を促すNOx浄化手段と、排気ガスに添加される尿素水を貯留する尿素水タンクと、尿素水タンク内の尿素水量を検出する尿素水センサ113とを備える。尿素水タンク内の尿素水量が規定量以下のときに、脱穀駆動回路118にて脱穀クラッチ93を動力切断状態に維持するように構成する。
(もっと読む)
作業車の走行制御装置
【課題】走行用の駆動力(トルク)の不足を避けながら、エンジンに大きな負荷が掛からないようにすることができ、しかも、そのことを的確に行うことができる作業車の走行制御装置を提供する。
【解決手段】走行用の静油圧式無段変速装置7の可変容量型の油圧モータ7Mにおける容量変更用の操作部7Maが低速側に移動するのを高速側に移動操作する操作力にて保持する保持手段56と、保持手段56の操作力を変更調整する操作力調整手段58と、操作部7Maを設定目標位置に維持させるように操作力調整手段に指令する指令値を変更調整する制御手段79とが設けられ、制御手段79が、操作部7Maを設定上限値を超えて指令値を増加させない形態で、操作力調整手段58に指令する指令値を変更調整し、且つ、基準走行状態であることを判別すると、操作部7Maを設定目標位置に維持させるときの指令値に基づいて設定上限値を補正する。
(もっと読む)
コンバイン
【課題】エンジンを小型で小排気量のものとして、燃料消費量の低減を図ることができるコンバインを提供する。
【解決手段】走行部10と、刈取部20と、脱穀部30と、選別部40と、穀粒処理部50と、排藁処理部60とを備えたコンバイン1において、第一エンジン70と、第二エンジン80と、発電機81と、バッテリ82と、モータ群83と、バッテリ82の充電残量を検出する充電残量検出手段91と、第二エンジン80のエンジン回転数を検出する第二エンジン回転数検出手段93と、第二エンジン80とモータ群83の各モータとを制御する制御手段90とを備え、制御手段90は、充電残量検出手段91により検出された検出値C0がバッテリ82への充電を開始するために設定した第一設定値C1を上回る場合に、第二エンジン80を停止する。
(もっと読む)
コンバインの走行制御装置
【課題】枕地での旋回の際にも脱穀装置を適正に駆動し、しかも、枕地での旋回を走行用の駆動力の不足を避けた状態で適切に行えるコンバインの走行制御装置を提供する。
【解決手段】走行用の静油圧式無段変速装置7の油圧モータ7Mにおける容量変更用の操作部7Maを設定目標位置に維持させるように、その操作部7Maが低速側に移動するのを高速側に移動操作する操作力にて保持する保持手段56の操作力を変更調整する操作力調整手段58作動を制御する操作力調整処理を実行する制御手段79が、刈取作業状態検出手段Uにて刈取作業状態から非刈取作業状態切り換ったことが検出されたのちにおいては、操作部7Maが設定目標位置よりも低速側に移動しても、刈取処理直後用の設定上限値を超えて保持手段56の操作力を増加させない形態にて操作力調整手段58の作動を制御する刈取処理直後用の操作力調整処理を実行するように構成されている。
(もっと読む)
刈取収穫機
【課題】刈取収穫機において、走行用の変速装置を移動走行用の高速位置、刈取作業用の標準位置、及び倒伏が激しい作物を刈り取る倒伏刈取作業用の低速位置に操作自在に構成した場合、刈取部用の変速装置を適切に連係させる。
【解決手段】人為操作具により標準刈取状態が設定されると、刈取部用の変速装置18を標準位置に操作して、この後に走行用の変速装置7Mを標準位置に操作する。人為操作具により低速刈取状態が設定されると、走行用の変速装置7Mを低速位置に操作して、この後に刈取部用の変速装置18を高速位置に操作する。
(もっと読む)
コンバイン
【課題】コンバイン作業における燃料消費量の節減、エンジン騒音の低減、排気ガスの減少による雰囲気の清浄化によって、住環境の保全に寄与すると共に、穀粒排出作業の能率を高める。
【解決手段】エンジン(68)の駆動力で発電を行なう発電機(101)と、該発電機(101)から供給される電力で刈取装置(8)を上昇駆動すると共に該上昇後の刈取装置(8)の有する位置エネルギーで発電を行なう発電機モータ(207)と、該発電機モータ(207)で発電された電力を蓄電するキャパシタ(109)と、該キャパシタ(109)から供給される電力によって穀粒排出装置(5a)を駆動する電動モータ(83)を設ける。また、電動モータ(83)を起動操作した場合にエンジン(68)の回転速度を自動的に減速させ、電動モータ(83)を停止操作した場合にエンジン(68)の回転速度を定格回転速度域まで自動的に増速させる制御装置(111)を設ける。
(もっと読む)
コンバイン
【課題】穀粒貯溜装置の穀粒をブロワによりエンジンの燃料消費量を節減しながら円滑に排出する。
【解決手段】エンジン駆動力によって第1、第2発電機で発電された電力を蓄電する第1、第2蓄電池を設け、第2蓄電池に蓄電された電力をブロワ駆動用の電動モータ及び穀粒繰出手段駆動用の繰出用電動モータに供電する。エンジンと電動モータとのうち、他方よりも高速回転となった側の駆動力をブロワ側へ出力する伝動切換装置を設け、設定電圧よりも低い第2蓄電池の電圧が検出された場合に、排出クラッチを自動的に接続する。
(もっと読む)
コンバイン
【課題】コンバイン作業における燃料消費量の節減、エンジンによる騒音の低減、排気ガスの減少による雰囲気の清浄化によって、住環境の保全に寄与すると共に、穀粒排出作業の能率を高め、収穫作業全体の能率を向上させる。
【解決手段】エンジン(68)の駆動力で発電を行なう発電機(101)と、該発電機(101)から供給される電力で刈取装置(8)を上昇駆動すると共に該上昇後の刈取装置(8)の有する位置エネルギーで発電を行なう発電機モータ(207)と、該発電機モータ(207)で発電された電力を蓄電するキャパシタ(109)と、該キャパシタ(109)から供給される電力によって穀粒排出装置(5a)を駆動する電動モータ(83)と、該電動モータ(83)の駆動力で穀粒排出装置(5a)を駆動する状態とエンジン(68)の駆動力で穀粒排出装置(5a)を駆動する状態とに切り換える伝動切換装置(69)を設ける。
(もっと読む)
コンバイン
【課題】エンジンの燃料消費量を節減すると共に、穀粒排出時のエンジン騒音を低減する。
【解決手段】エンジンの駆動力で発電する第1、第2発電機を設け、両発電機からの電力を蓄電する第1、第2蓄電池を設け、第2蓄電池の蓄電電力によって、穀粒排出装置駆動用の電動モータを駆動する。エンジンと電動モータとのうち、他方よりも高速回転となった側の駆動力を穀粒排出装置側へ出力する伝動切換装置を設ける。電動モータで穀粒排出装置を駆動している状態で、設定電圧よりも低い第2蓄電池の電圧が検出された場合に、排出クラッチを自動的に接続する。
(もっと読む)
コンバイン
【課題】センサにより旋回機構の異常を検出しても、作業者が旋回機構の異常を認識しないで作業することがある。
【解決手段】コンバインは、左右の車軸51の回転に回転差を発生させて旋回する無段階に変速可能な走行装置3と、走行装置3の操向レバー75の操作位置を検出する操向レバー位置検出手段76と、前記左右の車軸51の夫々の回転数を検出する回転検出手段78とを有する。制御コントローラ79の旋回制御異常検出手段80は、検出した左右の車軸51の回転差と、前記操向レバー75の傾倒操作角度とを対比して、旋回制御異常検出手段80で旋回制御の異常を検出し、該旋回制御異常検出手段80が異常と判定すると、異常を報知手段81により報知する。
(もっと読む)
コンバイン
【課題】エンジンの動力を走行伝動系と刈取伝動系とに並列的に分岐させて、走行伝動系の動力を走行装置に伝達し、刈取伝動系の動力を刈取部に伝達するように構成して、走行伝動系の動力を遮断可能に構成した場合、乗り心地の悪化を防止する。
【解決手段】走行伝動系の動力を走行装置に伝達する伝動状態、及び走行伝動系の動力を遮断する遮断状態に操作自在な機体停止手段を備える。機体停止手段を伝動及び遮断状態に操作自在な人為操作具94を備える。機体の走行速度を検出する速度検出手段105を備え、機体の走行速度が事前に設定された設定速度よりも高速であると機体停止手段の遮断状態への操作を阻止する牽制手段を備える。
(もっと読む)
刈取作業機の姿勢制御装置
【課題】植立茎稈が倒伏している倒伏状態にて刈取作業を行う場合に、刈取作業を良好に行うことが可能となる刈取作業機の姿勢制御装置を提供する。
【解決手段】植立茎稈を立姿勢に引き起こす引起し装置7を備えた刈取部2が昇降操作手段C1により昇降自在に備えられ、機体本体Vの水平基準面に対する前後傾斜角が設定傾斜角に維持されるように姿勢変更操作手段の作動を制御するピッチング制御を行する姿勢制御手段が、植立茎稈が倒伏している倒伏状態に対応する倒伏用制御モードが指令されている場合には倒伏用制御モードが指令されていない場合に比べて、走行装置の接地部に対する機体本体の前後傾斜角を低速で変更操作する。
(もっと読む)
刈取作業機
【課題】副変速装置を作業状況に応じた適切な変速状態に切り換えて作業能率の向上を図ることが可能となる刈取作業機を提供する。
【解決手段】刈取部にて搬送される刈取穀稈の存否を検出する穀稈存否検出手段にて刈取穀稈の存在が検出され且つ刈取部が刈取穀稈を搬送すべく駆動されている駆動状態であるか非駆動状態であるかを検出する刈取駆動状態検出手段にて駆動状態であることが検出される刈取作業判別条件が成立すると刈取作業状態であると判別し、刈取作業判別条件が成立していないと非刈取作業状態であると判別するように構成され、副変速装置40を高速変速状態に切り換えている場合に前記非刈取作業状態であると判別する状態から前記刈取作業状態であると判別する状態に切り換わると、副変速装置40を高速変速状態から標準変速状態に切り換えるように変速操作手段の作動を制御する。
(もっと読む)
コンバインの変速制御装置
【課題】走行装置が走行しているのにも拘わらず故障等により実走行速度検出手段が零を出力することがあっても、走行連係変速処理によって刈取処理装置を駆動することが可能なコンバインの変速制御装置を提供する点にある。
【解決手段】走行装置と一体回転する回転体に検出作用して前記走行装置の走行速度を検出する実走行速度検出手段26の検出情報に基づいて、刈取処理装置の駆動速度を走行装置の走行速度が高速となるほど高速にする関係にて定めた設定関係速度にするように変速手段を変速操作する走行連係変速処理を実行する変速制御手段Hが、実走行速度検出手段26にて検出される走行速度が零のときには、走行変速操作具24にて指令されて目標速度検出手段25にて検出される目標走行速度を走行速度として、走行連係変速処理を実行するように構成されている。
(もっと読む)
コンバイン
【課題】 コンバインの刈取脱穀作業によって排出される切断藁を、圃場内を満遍なく全面的に拡散排出することができ、この切断藁を堆肥とした土質の改善をむらなく行えるものとする。
【解決手段】 刈取部(3)が所定高さ以上に上昇すると、刈取部(3)と脱穀フィードチエン(13)の駆動を停止し、刈取部(3)が所定の刈高さ位置までに下降すると刈取部が駆動し、刈り始め時の刈取搬送穀稈が脱穀フィードチエン(13)の始端部に受継可能な位置近くにまで達すると、これを検出する穀稈センサ(16)の検出結果に基づき脱穀フィードチエン(13)の駆動を再開するよう連動させる。
(もっと読む)
コンバイン
【課題】走行機体の外側方に刈取装置を移動させて行うメンテナンス作業が簡単に実行でき、刈取装置や脱穀装置に対するメンテナンス作業性を向上できるようにしたコンバインを提供する。
【解決手段】刈取駆動力を伝達する機体側入力軸178が走行機体1に配置され、刈取装置に刈取駆動力を伝達する移動側入力軸45が刈取装置に配置され、刈取装置が縦軸150回りに横移動することによって係脱するギヤ機構を介して、機体側入力軸178に移動側入力軸45が連結される構造であって、縦軸150回りの回動によって刈取装置を横移動させる電動アクチュエータ164と、走行機体1の運転部から電動アクチュエータ164を遠隔操作する操作具168,169とを備え、運転部10のオペレータによって操作具168,169が操作されたときに、エンジン始動用のバッテリ170を電源として電動アクチュエータ164が作動するように構成したものである。
(もっと読む)
コンバイン
【課題】デバイダが穀稈の株を割らずに分草し、円滑に穀稈を搬送すると共に乱れなく穀稈を刈取り可能な8条刈りのコンバインを提供する。
【解決手段】8条刈りのコンバイン1は、9本のデバイダを有していると共に、これら9本のデバイダのうち左端から数えて4番目、右端から数えて6番目の機体内側のデバイダを刈取り基準位置としている。上記9本のデバイダは、刈取り基準位置のデバイダが左右の穀稈の中央に位置する際、尺植え及び尺一寸植えのどちらでも穀稈の株を割らないように配設されている。また、この刈取り基準位置のデバイダを支持するデバイダフレーム23aには、方向自動制御用の方向センサ18が取付けられており、この方向センサ18の左右のセンサバー18L,18Rと穀稈とが接触すると、その接触した側のセンサバー18L,18Rとは逆方向に機体の進行方向が修正される。
(もっと読む)
トラクタ
【課題】従来装置は、満タンまで給油すると警報ブザーで報知されるから、キースイッチを切り忘れることはほとんどないが、給油を途中で終了した場合、キースイッチを切り忘れてONのまま車両を離れる場合があり、バッテリーの蓄電を浪費する課題があった。
【解決手段】車体1に搭載された燃料タンク2を覆うカバー3には、給油時に開閉できる蓋4付きの給油口5が開口して設けられ、該給油口5の外側には、給油時に給油タンク6を載置できるタンク載せ台7が、使用状態と格納状態とに切り替え可能に装備して設けられたトラクタにおいて、前記給油口5の蓋4を開くか、又は前記タンク載せ台7上に給油タンク6を載せると、関連して前記燃料タンク2の満タン予告回路8に電流が流れる構成としたことを特徴とするトラクタの構成とする。
(もっと読む)
101 - 120 / 247
[ Back to top ]