
Fターム[2B304MA01]の内容
Fターム[2B304MA01]に分類される特許
1 - 20 / 29
作業機
苗移植機
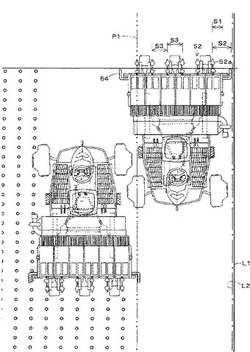
【課題】作業者が目視できない機体後方の苗植付装置とその近傍の情報を操縦席に着席したまま確認できるようにして、正しい圃場位置に苗を植え付けることができる構成を備えた苗移植機を提供すること。
【解決手段】苗を積載する複数条の苗タンク51に苗タンク51と走行車体2後方の情報を検出するCCDカメラ48と、該CCDカメラ48が検出した情報を表示する表示装置16を操縦部33に配置し、カメラ48が検出した情報から苗の植付条列や畦際を制御装置100で判断し、表示装置16に次の植付作業位置を示す第1植付仮想線P1及び圃場と畦際の境界線を示す第1畦際仮想線L1を出力することにより、走行車体2の後方の苗の植付状態や苗タンク51に積載した苗の状態を操縦部33から移動することなく確認することができ、苗の植付姿勢や植付深さの変更を速やかに行えるため、苗の植付姿勢が安定する。
(もっと読む)
作業車両

【課題】
操舵部材を直進位置に保持して自動直進走行を行なうことができると共に、機体が傾斜すると自動的に進行方向を修正することのできる作業車両を提供する。
【解決手段】
走行車体2に操舵輪10を設け、操舵輪10を操作する操舵部材34を設け、走行車体2に機体の傾斜を検出する傾斜検知部材101を設け、傾斜検知部材101が左右方向の傾斜を検知すると操舵部材34を操作して走行車体2の進行方向を補正する作業車両において、操舵部材34を操作自在な自由状態と、操舵部材34を直進位置に保持する保持状態に切り替える操作切替部材103を設け、操作切替部材103を保持状態に操作していても傾斜検知部材101が機体の傾斜を検知すると、操舵部材34の保持を解除して傾斜方向の反対側に操作する構成とする。
(もっと読む)
電動農作業車のモータ制御装置
【課題】走行動力及び作業動力を発生させる動力用電動モータと、油圧ポンプを駆動させる油圧ポンプ用電動モータとをそれぞれ別々に備える2モータ方式の電動農作業車において、バッテリ消費を抑える。
【解決手段】走行機体1に昇降自在に連結される植付作業機3と、該植付作業機3を昇降させる作業機昇降用油圧シリンダ4と、該作業機昇降用油圧シリンダ4に圧油を供給する油圧ポンプ15と、該油圧ポンプ15を駆動させる油圧ポンプ用電動モータ5Bと、走行動力及び作業動力を発生させる動力用電動モータ5Aと、動力用電動モータ5A及び油圧ポンプ用電動モータ5Bの駆動を制御するモータ制御装置23と、を備える電動乗用田植機において、モータ制御装置23は、植付作業機3の昇降動作固定状態を検出すると共に、植付作業機3が昇降動作固定状態のときは、油圧ポンプ用電動モータ5Bの駆動を休止させる。
(もっと読む)
農作業機
【課題】 本発明は、機体の旋回制御を、簡単な構成で行えるようにすること及び様々な旋回形態に対応できるようにすることを課題とする。
【解決手段】 機体の畦際旋回時に農作業装置の作動を停止し、作業開始位置で自動的に農作業装置の作動を開始させる制御装置を設けた農作業機において、農作業装置の作動を入切する操作レバー(19)と、該操作レバー(19)を各々の操作位置に位置決めする位置決め機構と、操作レバー(19)を作動させるレバーモータ(99)と、位置決め機構を位置決めしない状態に解除する位置決め解除機構とを設け、レバーモータ(99)から操作レバー(19)への作動連繋機構に融通機構(132a)を設け、前記作業開始位置で、レバーモータ(99)を駆動することにより、位置決め解除機構を作動させると共に操作レバー(19)を作業位置(A)に作動させる構成とした。
(もっと読む)
遠隔操作式農業用トラクター
【課題】本発明は、実際に農圃でトラクターに搭乗せずとも、離れた場所からトラクターを遠隔操作することによって、快適かつ安全に作業をすることができ、また、トラクターの過去の運転状態を記憶させることによって、同じ農圃であれば、無人で自動的に反復して農作業をすることができる遠隔操作式トラクターを提供するものである。
【解決手段】エンジンを動力とする走行装置と、前記エンジン駆動により作業機に回転動力を伝達する装置と、前記作業機を牽引しかつ昇降できる作業機用昇降機と、を有する農業用トラクターにおいて、前記農業用トラクターと離れた位置にある遠隔送信機の操作信号を受信し、前記操作信号により前記農業用トラクターの走行速度と走行方向と作業機への伝達回転と作業機の昇降とを制御する指令を出す制御装置を有することを特徴とする遠隔操作式農業用トラクター。
(もっと読む)
作業車両
【課題】作業車両において、作業機を昇降させることのできるフィンガーレバーを利用した左右操舵装置、及びウインカ点滅を可能にする。
【解決手段】ステアリングハンドルの近傍に一回の操作で作業機を昇降させることのできるフィンガーレバー、該フィンガーレバーの昇降操作検出用のフィンガーレバー上げ用スイッチ、フィンガーレバー下げ用スイッチ、及び、チエックヒューズを設け、旋回切れ角センサの故障時には前記チエックヒューズを取り外すと緊急操舵モードに移行し、前記フィンガーレバーの昇降操作に基づく前記フィンガーレバー上げ用スイッチ、フィンガーレバー下げ用スイッチの検出信号により、前記旋回切れ角センサの検出値を無視して前記旋回駆動手段、前記操舵装置を作動させて左右操舵するコントローラを設けたことを特徴とする作業車両とする。
(もっと読む)
作業車両
【課題】圃場の路面状況を適確に把握できると共に、圃場の状態に応じた旋回及び走行が可能で作業効率や操作性が向上する作業車両の提供である。
【解決手段】走行機体Tの後部に装着した作業機Rと、後輪3のブレーキと、前輪2の操作ハンドル7と、前方の路面状況を撮影するCCDカメラ15と、前方の障害物までの距離を検出する超音波センサ17と、旋回時期を報知するブザー50と、CCDカメラ15の画像から前方の障害物までの距離を算出し、超音波センサ17による検出距離とほぼ同じである場合に、旋回までの走行距離を算出して旋回時にブザー50などにより報知すると共にハンドル7操作により走行機体Tが旋回すると作業機Rを上昇させて旋回内側の後輪3のブレーキを作動させ、旋回が終了するとCCDカメラ15の画像から未耕地と既耕地を判断して作業機Rの下降位置を判定し作業機Rを下降させる制御を行う制御装置とを設けた作業車両である。
(もっと読む)
農作業機
【課題】方向修正制御が容易に行えるトラクタに装着される農作業機を提供することを目的とする。
【解決手段】トラクタに装着する支持フレーム11、12と、支持フレーム11、12に対して回動可能に支持され農作業を行う作業部13と、作業部13を支持フレーム11、12に対して回動させるアクチュエータ22と、制御部26と、方向修正スイッチ27a、27bを有する操作部27と、作業部13に設置されるセンサ31とを備え、制御部26は、センサ31からの情報から作業部13の方向が基準の方向に一定になるようにアクチュエータ22を制御し、方向修正スイッチ27a、27bの操作された場合、アクチュエータ22を駆動させ、当該操作が終了したときの作業部13の方向を新たな基準の方向とする。
(もっと読む)
作業車
【課題】作業車において旋回する場合に旋回終了位置を適切に検出し、作業装置が適切に作業状態に操作されるように構成する。
【解決手段】機体の走行距離Gと、操向操作自在な車輪1の直進位置からの操向角度とにより、作業行程からの旋回開始L01に基づいて、旋回開始前の機体の進行方向+Y,−Yでの旋回中の機体の位置を検出する。旋回開始位置E1の検出に基づいて、アクチュエータを作業装置5の非作業状態側に作動させ、旋回終了位置E3の検出に基づいて、アクチュエータを作業装置5の作業状態側に作動させる。アクチュエータの作業装置5の作業状態側への作動開始時期を変更可能に構成する。
(もっと読む)
走行車両
【課題】 本発明は、機体が小回り旋回性を維持しながら、旋回後半には旋回後のための位置合わせが容易に行えるようにすることを課題とする。
【解決手段】 ステアリング機構により前輪が直進状態から操舵状態へ操向されるのに連動して旋回内側のサイドクラッチを断続的に入/切し、前輪が操舵状態から直進状態へ戻るのに連動して旋回内側のサイドクラッチを常時入状態にする旋回連動機構と、走行車体の旋回中において、前輪の向きが操舵状態から直進状態側へ戻されるのを旋回角度センサが検出するのに連動して、旋回連動機構により断続的に入/切する周期における入状態の割合を大きく変更し、以降、前輪が直進状態へ戻るまで前記入状態の割合を小さく変更しない制御装置を備えた走行車両とした。
(もっと読む)
作業車の走行制御装置
【課題】 GPS位置情報算出手段により求められる車体の位置情報を有効に利用することで、低コストのジャイロ装置を用いてコスト低減を図ることを可能にしながらも、設定経路に沿う操向制御を極力良好に行えるようにする。
【解決手段】 車体の位置情報を求めるGPS位置情報算出手段100、車体の方位変位情報を検出するジャイロ装置57、ジャイロ装置57にて車体の方位変位情報が適正に検出されているジャイロ情報適正状態であるか適正に検出されていないジャイロ情報不適正状態であるかを判別するジャイロ情報判別手段103が備えられ、ジャイロ情報適正状態であることが検出されると、GPS位置情報算出手段100による車体の位置情報及びジャイロ装置57による車体の方位変位情報に基づいて操向制御し、且つ、ジャイロ情報不適正状態であることが検出されると、GPS位置情報算出手段100による車体の位置情報のみに基づいて操向制御する。
(もっと読む)
作業車の制御装置
【課題】前輪増速手段又は自動上昇手段を適切なタイミングで作動させることができ、位置合わせ走行の作業性を向上できる作業車の制御装置を実現する。
【解決手段】作業車の制御装置において、前輪2を後輪3の周速度よりも速く増速駆動させる前輪増速手段51を備え、前輪2の切れ角が所定増速角度β1以上であると前輪増速手段51が作動するように構成し、車体1の作業走行経路に対する位置合わせ走行を推測する推測手段54を備え、推測手段54により位置合わせ走行が推測されると、前輪増速手段51が作動しないように構成してある。
(もっと読む)
作業車の走行制御装置
【課題】 GPS位置情報算出手段やジャイロ装置の検出状態が適正であるか否かを外部から識別可能にして、極力煩わしさの少ない状態で監視することが可能となる作業車の走行制御装置を提供する。
【解決手段】 GPS位置情報算出手段100にて求められる車体の位置情報及びジャイロ装置57にて検出される車体の方位変位情報がいずれも適正に検出されている適正検出状態であるか少なくともいずれか一方が適正に得られていない不適正検出状態であるかを判別する検出状態判別手段103と、前記適正検出状態であることが判別されているときと前記不適正検出状態であることが判別されているときとで表示内容を異ならせる形態で、且つ、車体外方から表示内容を目視可能な状態で判別結果を表示する判別状態表示手段78とが備えられる。
(もっと読む)
作業車両
【課題】音声による運転制御により安全性を高めた作業車両を提供することである。
【解決手段】音声認識装置121は、機体Tが停止している場合又はトラクタに連結した作業機Rが作動停止している場合に、これらを動作開始する操作指令がマイク122又は送受信装置120からあると、スピーカ124などで動作開始をする旨を報知した後、機体Tの走行開始出力又は作業機Rの動作出力を実施し、動いている機体Tを停止させる操作指令又は機体Tに連結した作業機Rの作動停止指令に対しては、機体Tの走行停止又は作業機Rの作動停止用の出力をした後、音声による返答を音声認識装置121を経由して返答内容(機体Tの走行停止又は作業機の作動停止の完了)を報知する構成とした。機体T又は作業機Rが間違って走行又は作動しないときなどには安全確保できる。また、それらの場合に機体T又は作業機Rが迅速に停止する側に動くため安全である。
(もっと読む)
作業車
【課題】ロータリ耕耘装置を下降位置から上昇させる際に形成される耕耘跡の発生を防止でき、圃場での農作業の作業性を向上させることのできる作業車を実現する。
【解決手段】走行車体1の後部に装備されたロータリ耕耘装置Fを昇降駆動する昇降機構8,9と、操作指示を出す操作指示手段37と、を備え、操作指示手段37からの操作指示に基づいて、ロータリ耕耘装置Fを予め設定された中間位置から上昇位置まで上昇させる速度よりも低速で、ロータリ耕耘装置Fを下降位置から中間位置まで上昇させるように、昇降機構8,9を駆動させる耕耘装置自動上昇手段を備えて、作業車を構成する。
(もっと読む)
農作業機用制御装置
【課題】トラクタの種類に合わせて制御ユニットを交換する必要がない農作業機用制御装置を提供する。
【解決手段】農作業機用制御装置8は、トラクタ1の信号出力部4に電気的に接続した車速信号変換ユニット11と、車速信号変換ユニット11に電気的に接続した制御ユニット12とを備える。車速信号変換ユニット11は、トラクタ1の種類に応じて異なる車速信号を入力し、この入力した車速信号を1種類の共通車速信号に変換して出力する。制御ユニット12は、車速信号変換ユニット11からの共通車速信号を入力し、この入力した共通車速信号に応じて作業部7を制御する。
(もっと読む)
作業車の操作構造
【課題】 作業地の状態や作業形態などが標準的ではない場合でも、作業地の状態や作業形態などに対応した制御モードの選択状態を簡単かつ確実に現出できるようにする。
【解決手段】 選択して使用される複数の制御モードと、対応する制御モードを、使用が選択された選択状態と、使用の選択が解除された選択解除状態とに切り換える複数の選択操作具49,60,74,77,81,84,93,97,98,99と、予め選定された複数の制御モードを一括して選択状態と選択解除状態とに切り換える単一の一括操作具103とを備え、所定の更新操作によって、一括操作具103の操作に基づいて現出される制御モードの選択状態が、予め選定された複数の制御モードを選択する標準選択状態から、任意に選定した複数の制御モードを選択する任意選択状態に設定変更されるように構成してある。
(もっと読む)
作業車
【課題】 作業走行を終えて次の作業箇所に旋回走行して移動するとともに次の作業箇所に自走車体を位置合わせするに当たり、迅速に移動することができ、かつ、精度よく容易に位置合わせすることができる作業車を提供する。
【解決手段】 主変速装置17に連係された制御手段21に、走行速度検出手段22を連係させるとともに旋回角度計測手段30を備えてある。旋回角度計測手段30による計測旋回角度が設定旋回角度になると、制御手段21は、自走車体が低速設定手段24による設定低速度で走行するように、主変速装置17を減速操作する。
(もっと読む)
作業車の前輪増速駆動装置
【課題】前輪増速装置を装備した作業車において、旋回時に作業機上昇と前輪増速が同時に作動してしまい、圃場端の耕耘の終了部が斜めになることがあった。
【解決手段】ステアリングハンドル57の回動角を検知する手段と、作業機昇降制御手段と、前輪増速切換手段と、これらの制御手段を備え、ステアリングハンドル57を直進位置から設定角度以上切ると、作業機を上昇させ、前輪を増速駆動するようにした作業車において、前記作業機の上昇動作と前輪を増速駆動する動作との間に所定の時間差を設けた。
(もっと読む)
1 - 20 / 29
[ Back to top ]