
Fターム[2F065AA20]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 位置;移動量 (12,734) | 特殊なもの (4,038) | 相対位置 (1,469)
Fターム[2F065AA20]に分類される特許
1 - 20 / 1,469
薄膜形成装置及び薄膜形成方法
接触部検出装置および接触部検出方法
物品配列検査方法および物品配列検査装置
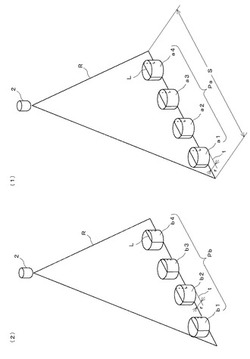
【課題】整列状態にあることが要求される物品の列について、整列状態を乱す物品の位置ずれ、欠落、倒れなどの種々の整列不良を検出することを可能とする。
【解決手段】物品の列が整列状態にあるかどうかを検査する方法であって、準備工程では、整列状態にある物品a1〜a4の列Paに対しその物品の列を列方向の全幅にわたって切断するような帯状の光Rを照射して各物品a1〜a4の表面に各物品の輪郭に沿う光切断線Lを生成するとともに、その光切断線Lを撮像して基準となる画像を取得する。検査工程では、検査対象の物品b1〜b4の列Pbに対し同じ帯状の光Rを照射するとともに、前記準備工程で撮像した光切断線の生成位置に対応する位置に生成された光切断線Lを撮像して検査対象画像を取得した後、その検査対象画像を前記基準となる画像と照合して、検査対象の物品b1〜b4の列Pbが整列状態にあるかどうかを判別する。
(もっと読む)
ゴム摩擦試験方法及びゴム摩擦試験装置

【課題】ゴム試験片の接触面形状を得るとともに接触面内の歪み分布を算出することで、ゴム試験片の摩擦摩耗特性を適切に評価できるゴム摩擦試験方法及びゴム摩擦試験装置を提供する。
【解決手段】本発明のゴム摩擦試験方法は、ドーナツ状のゴム試験片1の外周面11に画像解析用パターン13を形成するパターン形成工程と、ゴム試験片1の外周面11を、円筒部21が透明材料で形成された回転式ドラム2に接触させつつ、ゴム試験片1及び回転式ドラム2を回転させる摩擦試験工程と、摩擦試験工程と同時に、外周面11を円筒部21を通して撮影して外周面画像11Pを取得する画像取得工程と、取得した外周面画像11Pからゴム試験片1の接触面形状を得るとともに、外周面画像11Pに含まれる画像解析用パターン13に基いてゴム試験片1の接触面内の歪み分布を算出することにより、ゴム試験片1の摩擦摩耗特性を評価する評価工程と、を備える。
(もっと読む)
アライメント方法およびパターン形成方法
【課題】2つの基板のそれぞれに形成されたアライメントマークの両方に同時にピントを合わせることができない場合であっても、それらの位置合わせを高精度に行うことを可能にする。
【解決手段】パターンを転写される基板に形成されるアライメントマークAM1は、正方形の中実図形であるアライメントパターンAP101〜AP109、AP111〜AP114を配列してなるものとする。一方、基板に転写すべきパターンを担持するブランケットには、アライメントマークAM2として、環状の中空矩形のアライメントパターンAP2をパターンと同じ材料で形成する。アライメントマークAM1は、低い空間周波数成分をアライメントパターンAP2よりも多く含むパターンにより構成されており、ピントが合わない状態で撮像された場合でも重心位置を精度よく検出することが可能である。
(もっと読む)
下水圧送管路におけるピグ位置検出装置
【課題】下水圧送管路内に走行させて堆積物等を除去する洗浄用ピグの走行位置を検出する場合、管路途中でピグが停止した場合は、その位置を正確に検出することが出来なかった。
【解決手段】下水圧送管路1の内壁面に、管路内を走行する洗浄用ピグ7が接触するようにセンサ用光ファイバ2を配設し、光学式温度センサ本体3からセンサ用光ファイバ2にパルス光を入射させ、センサ用光ファイバから出射される後方散乱光を測定系に導いてセンサ用光ファイバの長手方向の温度を測定し、ディスプレイ装置5に測定した温度情報を監視画面6として表示する。走行する洗浄用ピグ7がセンサ用光ファイバ2に接触して生じる摩擦により発生した熱の温度を光学式温度センサ本体で測定することにより、洗浄用ピグ7の走行位置を監視する。
(もっと読む)
画像処理装置、運転支援装置、画像処理方法及び画像処理プログラム
【課題】移動体が移動する際の安全を確保するための画像処理装置を提供する。
【解決手段】移動体の予測軌道と、三次元モデルにおける移動体の位置及び大きさと、三次元モデルにおける立体物の大きさ及び位置とに基づいて、三次元モデルにおいて予測軌道上で移動体が立体物に接触するか否か判定する接触判定部260を備える。また、ステレオカメラの画像に基づいて距離を測定し、立体物の位置及び大きさを算出する。さらに、算出した横幅の接触量に基づいて予測軌道を変更した上で接触するか否か判定する。
(もっと読む)
画像処理装置、車両システム、及び、画像処理方法
【課題】天候及び距離によらず好適に物体までの距離を算出する。
【解決手段】画像処理装置は、取得された第1の車両の前方の画像から、第1の車両の前方の第2の車両の画像を検出する車両検出部と、第1の車両と第2の車両との距離を算出するために必要な複数のパラメータのうち、第2の車両の画像と前方の画像とから取得できないパラメータを判定する状況判定部と、第2の車両の画像と前方の画像とからパラメータを取得し、取得されたパラメータによって第1の車両と第2の車両との距離を算出する少なくとも一つの距離測定部と、を備え、状況判定部が、取得できないパラメータを判定した場合、少なくとも一つの距離測定部は、状況判定部によって判定された取得できないパラメータ以外のパラメータを用いて第1の車両と第2の車両との距離を算出するため、第2の車両の画像と前方の画像とを取得する。
(もっと読む)
移動距離計測装置、移動速度計測装置及びこれらを用いた撮像装置
【課題】対象物(被写体)の位置及び移動方向に限定されることなく、移動する対象物を撮像することによって、その対象物の移動距離を計測すること。
【解決手段】移動している被写体を撮像して、前記被写体の移動距離を計測する移動距離計測装置であって、撮像する位置から前記被写体までの距離に関する距離データを取得する測距手段と、撮像レンズを用いて、所定の時間間隔で前記被写体を撮像して、複数の画像を生成する画像生成手段と、前記距離データに基づいて前記複数の画像のうちの任意の2つの画像の前記被写体の位置に関する位置データを算出し、該位置データに基づいて前記撮像レンズの光軸の方向に対して垂直な平面に関する被写体の移動距離を算出する算出手段とを有することを特徴とする移動距離計測装置により上記の課題が達成される。
(もっと読む)
半導体基板の欠陥検査装置および半導体装置の製造方法
【課題】半導体基板の欠陥検査において、高精度かつ効率的に、可視光透過性を有する半導体基板の表裏面への焦点位置合せを行うこと。
【解決手段】
半導体基板の欠陥検査装置は、焦点位置合わせマークが表面に形成された可動ステージと、可視光を可動ステージに向けて照射する光源と、可動ステージに対向して設けられた対物レンズと、対物レンズが結像した画像を電気信号に変換する光電変換素子と、焦点位置合わせマークの可動ステージ上の位置および被検査物となる半導体基板の厚さが登録され、可動ステージと対物レンズの位置関係を制御する制御装置を備えている。制御装置は、登録された焦点位置合わせマークを基準にして半導体基板の裏面側の焦点位置合わせを行い、登録された半導体基板の厚さを基準にして半導体基板の表面側の焦点位置合わせを行う。
(もっと読む)
作業位置誘導装置及びその誘導方法
【課題】作業者が作業対象物から目を逸らすことなく、誘導画像を参照しながら作業対象位置を選別できるようにする。
【解決手段】作業時に、ポインティング部11の先端が、作業面の予め既知の作業対象位置に向かうように誘導する場合に、カメラ部13により作業面を撮影し、画面が透過する透明スクリーン部15により、作業時に作業面を見えるようにしながら、誘導用の位置ナビゲーションマーク153及び直交する交差点が誘導中心のライン151,152を表示し、カメラ部13で撮影された画像からポインティング部11の先端の位置を算出し、既知の作業対象位置の位置情報と比較し、両者のずれ量及び方向に基づいて透明スクリーン部15に誘導中心に対する位置ナビゲーションマークを表示し、位置ナビゲーションマークが誘導中心に向かうように移動方向を画面上に指示表示する。
(もっと読む)
コークス炉移動機の位置調整方法及び装置
【課題】コークガイド車などの移動体の移動路に沿って設けられた目標体とコークス炉の位置関係に誤差が生じても移動機を簡易に目標とする位置にする。
【解決手段】コークガイド車1の移動路に沿って設けられた目標体9を検出し、目標体検出装置4で目標体9を検出したときのコークガイド車1の規定位置に対し、目標位置検出装置5で目標位置を検出しながら規定位置から目標位置までコークガイド車1を移動し、検出された目標位置と規定位置との位置誤差を記憶し、以降、目標体9を検出した位置から記憶された位置誤差分だけ移動してコークガイド車1を目標位置にすることにより、目標体9とコークス炉7の位置関係に誤差が生じても、一度、目標体9を検出したときの規定位置と目標位置との位置誤差を記憶してしまえば、以降はコークガイド車1を簡易に目標とする位置にすることができる。
(もっと読む)
エンコーダ装置、光学装置、及び露光装置
【課題】回折格子を用いて計測を行う際に、相対位置を予め定められた相対位置からの絶対位置として容易に計測する。
【解決手段】エンコーダ10Xは、第1部材6に設けられ、格子パターン12Xa及び基準パターン13XAが形成された回折格子12Xと、計測光MX1,MX2を供給するレーザ光源16と、第2部材7に設けられ、計測光MX1,MX2を格子パターン面12Xbにθy方向(X方向)に対称な角度で傾斜させて入射させる傾斜ミラー32X,34Xと、計測光MX1,MX2の回折格子12Xによる回折光DX2,EX2を受光する光電センサ40XA,40XBと、を有する。
(もっと読む)
検査結果の目視確認作業の支援用のシステムおよび装置ならびに方法
【課題】確認対象部位を容易に特定できるような支援を行う。
【解決手段】自動外観検査が完了した対象物(基板)について、検査に用いられた画像を保存すると共に、検査における計測処理により得た計測データを計測対象部位の位置情報に紐付けて保存し、これらの保存情報を用いて、特定の被検査部位(部品100)の実際の状態を目視により確認する作業を支援するための画像を表示する。この画像は、基板の一部に相当する領域に対応し、確認対象部品100が含まれる。画像中の確認対象部品100には、枠UWやラインL1,L2などによるマーキングが施される。さらに確認対象部品100の周囲を取り巻くように、視認が可能で固有の特徴を有する特徴部位(部品101,102,103など)が抽出され、これらの特徴部位に、確認対象部品100とは異なる態様(赤枠RW)によるマーキングが施される。
(もっと読む)
撮像装置、撮像方法、及びプログラム
【課題】被写体までの距離とともに、被写体の肌領域を精度良く算出する。
【解決手段】第1のLEDは、被写体に対して、第1の波長の光を照射し、第2のLEDは、被写体に対して、第1の波長とは異なる第2の波長の光を照射し、距離画像センサは、被写体からの反射光を受光する。そして、肌検出部は、被写体からの反射光として第1の波長の光が受光されることにより得られる第1の画像と、被写体からの反射光として第2の波長の光が受光されることにより得られる第2の画像に基づいて、被写体の肌を表す肌領域を検出し、距離画像センサは、第1の波長の光が被写体に照射されたときから、被写体からの反射光として受光されるまでの第1の往復時間を算出し、算出した第1の往復時間に基づいて、被写体までの距離を算出する。本開示は、例えば、被写体の撮像により、距離画像を生成する撮像装置等に適用できる。
(もっと読む)
部品実装基板生産装置、および、三次元形状測定装置
【課題】高精度かつ高速に測定対象物の三次元形状を測定する部品実装基板生産装置および三次元形状測定装置を提供する。
【解決手段】部品実装装置であって、撮像部であるカメラ200と、輝度変化光を発する発光部130と、測定対象物の表面における輝度変化光の輝度分布を相対的に第二方向に移動させるヘッド100と、測定対象物との間の距離が維持されるように配置された基準面部113と、基準面部113の基準面部位の少なくとも1点の輝度変化光を撮像した結果である基準面データおよび対象物データを取得するデータ取得部160と、基準面データおよび基準面部113の反射率と基準輝度値とを用いて、基準面部113の第三方向におけるずれ量を算出するずれ量算出部170と、ずれ量を用いて測定部位における光の輝度値を補正する補正部180と、補正された輝度値を用い、位相シフト法に用いられる波形を作成する波形作成部190とを備える。
(もっと読む)
変位センサ
【課題】被測定物の表面の反射の状態によって、変位センサの測定方式を切り換えたり、変位センサを交換したりすることを不要にする。
【解決手段】拡散反射板212は、レーザ光源231から出射され、ワーク102の加工面で正反射されたプローブ光が入射する位置に配置されている。リニアセンサ233は、拡散反射板212により拡散反射されたプローブ光がさらにワーク102の加工面で反射された第1の反射光、レーザ光源231から出射されたプローブ光がワーク102の加工面で拡散反射された第2の反射光を受光する。信号処理部234は、第1の反射光によりプローブ光がワーク102の加工面を介して拡散反射板212に入射するまでの第1の距離を検出するか、または、第2の反射光によりプローブ光がワーク102の加工面に入射するまでの第2の距離を検出する。
(もっと読む)
光学式検査装置及びエッジ検査装置
【課題】ウェハエッジ部の幅広い位置変化にも追従することができる光学式検査装置及びエッジ検査装置を提供する。
【解決手段】ウェハ100の表面の欠陥を検査する表面検査装置300と、この表面検査装置300に対するウェハ100の搬送路に設けたウェハステージ210と、このウェハステージ210上のウェハ100のエッジ部を検査するエッジ検査部530と、このエッジ検査部530を当該エッジ検査部530の光軸に沿って移動させる移動装置650とを備えたことを特徴とする。
(もっと読む)
回転角度計測装置及び方法
【課題】計測対象の回転体の回転角度を、計測センサが非接触で、計算コストを抑え且つ高精度で計測する。
【解決手段】回転体1の回転角度と一意的に対応するマーカ模様の境界線を有する螺旋状マーカ2を回転体1に設置し、ラインセンサ4で螺旋状マーカ2を撮影し、解析装置5によって、予め求めておいたマーカ模様の境界線位置から回転体1の回転角度を計算する式を基に、ラインセンサ4で撮影した画像から回転体1の回転角度を計測する。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】画像の領域の大きさを使用者の操作精度によらず容易かつ均一に得ることが可能な画像処理装置および画像処理プログラムを提供する。
【解決手段】画像データに基づく初期画像IMにおいて抽出される領域A4が表示部260の画像表示領域261に表示される。表示された領域A4に外接する外接矩形Pが作成される。作成された外接矩形Pが表示部260の画像表示領域261に表示されるとともに、作成された外接矩形Pの予め定められた部分の寸法または面積を示す特徴量が算出される。使用者は、入力装置を用いて表示部260の画像表示領域261に表示された外接図形Pを回転させることができる。
(もっと読む)
1 - 20 / 1,469
[ Back to top ]