
Fターム[3C007CX01]の内容
マニピュレータ、ロボット (46,145) | 関節 (545) | 関節部に駆動源を有するもの (234)
Fターム[3C007CX01]に分類される特許
161 - 180 / 234
ロボットの駆動機構及びロボットハンド
【課題】本発明は、1つのアクチュエータで2つの関節を駆動する機構において、高負荷がかかる姿勢においても、対象物に対して十分な操作力を加えることが可能な多関節ロボット、特に小型化されたロボットハンドの駆動機構を提供することを目的とする。
【解決手段】本発明のロボットの駆動機構は、第一リンクと第二リンクの接合部にある第一関節と、第二リンクと第三リンクの接合部にある第二関節の2つの関節を、1つのアクチュエータとリンクアームにより連動して駆動できるようにしたロボットの駆動機構において、アクチュエータを第一リンク又は第二リンクに配置し、リンクアームは、その一端部が第一リンクに設けられた第一支軸を介して回転可能に軸支されるとともに、他端部が第三リンクに設けられた第二支軸を介して回転可能に軸支され、第一リンク、第二リンク及び第三リンクの伸展姿勢にて、前記第一支軸を、前記第一関節の軸と前記第二支軸を結ぶ線上に配置することを特徴とする。
(もっと読む)
産業用ロボットの関節装置

【課題】部品点数を抑えた低価格の産業用ロボットの関節装置を提供する。
【解決手段】第一関節部材310及び第二関節部材320を減速機100を介して相対回転させるモータ330が第二関節部材320側に固定され、減速機100が、内歯部材110と、内歯部材110に回転自在に保持された回転部材120と、内歯と噛合う外歯が形成された外歯歯車141,142と、モータ330からの回転により外歯歯車141,142を偏心揺動させるクランク軸151とを有する産業用ロボットの関節装置において、回転部材120,130及び外歯歯車141,142のそれぞれの中央に中空孔を形成する一方、一端が第一関節部材310に係合され、他端が第二関節部材320に係合され、中央部が各中空孔を貫通する保護筒360を備えている。
(もっと読む)
ロボット用関節モジュール、ロボット用多指ハンドモジュール、多関節ロボットアームおよびこれらを備えたロボット
【課題】 ドライブ装置のアンプ部で発生する熱を放熱によって効果的に冷却することができる汎用生の高い放熱機構を有するロボット用関節モジュール、ロボット用多指ハンドモジュール、多関節ロボットアームおよびこれらを備えたロボットを提供する。
【解決手段】 ロボットの関節モジュールの結合機構4a側にドライブ装置3の発熱面6を近接配置して熱を結合先の他の関節モジュールのリンクに逃がすようにし、さらに結合機構4aの結合面18に熱伝導シート7を設置して放熱効果を高める。また、該関節モジュールを複数連結して多関節ロボットアームを構成し、該多関節ロボットアームの先端に多指ハンドモジュールを取付けてハンドリングを行なうロボット装置を構成する際にも、熱伝導シートを介して、効率良く熱が伝達する。その結果、ロボット装置全体として高い冷却効果が得られる。
(もっと読む)
産業用ロボットの関節装置
【課題】部品点数を抑えた低価格の産業用ロボットの関節装置を提供する。
【解決手段】第一関節部材310及び第二関節部材320を減速機100を介して相対回転させるモータ330が第二関節部材320側に固定され、減速機100が、内歯部材110と、内歯部材110に回転自在に保持された回転部材120と、内歯と噛合う外歯が形成された外歯歯車141,142と、モータ330からの回転により外歯歯車141,142を偏心揺動させるクランク軸151とを有する産業用ロボットの関節において、回転部材120が、第二関節部材320と係合する端板部120p及び外歯歯車141,142の遊嵌孔に挿入された突起部120eを有する第一回転部材120と、その突起部120eに固定される第二回転部材130とを有し、内歯部材110が第一関節部材310に一体的に係合している。
(もっと読む)
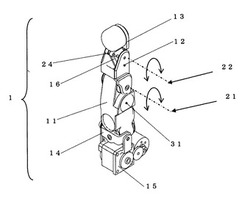
回動調整装置及び回動装置の制御方法
【課題】回動装置を使用する際の消費エネルギを節減するとともに、回動装置やこれを駆動する駆動装置の磨耗や損傷を抑制する。
【解決手段】複数の回動軸(12a、12c、14a)を介して連結された複数の部材(体幹部材11、上腕部材13、前腕部材15)を有し、回動軸を中心とした一の部材に対する他の部材の相対的な回動運動を実現させる回動装置(動作補助装着具10)を備えるとともに、回動装置による複数の回動運動のうち少なくとも何れか一つを抑制する回動抑制手段(ロック機構30、回動抑制部62)を備える回動調整装置(装着式動作補助装置1)である。
(もっと読む)
ロボット及びロボットのベースの製造方法
【課題】押出し加工を利用しつつ、回転動作に適した形状の筐体を実現できるロボットを提供する。
【解決手段】スカラロボット1は、ベース2と、ベース2に対して第1軸A1回りに回転可能な第1アーム3とを備え、ベース2の外形を構成する筐体8のうち第1軸A1に沿う外周部10は、第1軸A1の軸方向への押出し加工により形成されている。
(もっと読む)
ロボット
【課題】アーム駆動時における、ケーブルを内包する中空部材のアームへの接触を防止できるロボットを提供する。
【解決手段】スカラロボット1は、ベース2と、ベース2よりも上方側において、ベース2に対して第2軸A2回りに回転可能で、第2軸A2から水平方向へ延びる第2アーム4と、第2アーム4内部の回路と、ベース2内部の回路とを接続するケーブル31と、第2アーム4から上方へ延びてから湾曲してベース2まで垂れ、ケーブル31を内包する可撓性のダクト6と、ダクト6のうち第2アーム4から上方へ延びる部分を、第2軸A2に対して第2アーム4の延びる方向とは反対側へ傾斜するように第2アーム4に対して固定する保持部材34とを備える。
(もっと読む)
ロボット
【課題】アームの後方への張り出しを縮小できるロボットを提供する。
【解決手段】スカラロボット1は、ベース2と、ベース2に対して第2軸A2の軸回りに回転可能なアームと、第2軸A2から離れた位置において第2アーム4に保持される作業軸5であって、第2アーム4に対して当該作業軸5の軸方向及び軸回りに移動可能な作業軸5とを備え、第2アーム4は、作業軸5を当該作業軸5の軸方向へ移動させる駆動力を生じる3軸モータ47と、作業軸5を当該作業軸5の軸回りに回転させる駆動力を生じる4軸モータ50とを備え、3軸モータ47と4軸モータ50とは、第2軸A2と作業軸5との間において、第2軸A2から作業軸5への方向に対して並列に配置されている。
(もっと読む)
産業用ロボット
【課題】 移動対象物を駆動させるために必要なトルクを小さくすることができる産業用ロボットを提供する。
【解決手段】 第3減速機96と第3駆動機97とが別体に形成されることで、第3減速機96の第3軸線方向寸法を小さくすることができ、第2軸線L2からエンドエフェクタまでの距離を短くすることができる。これによって第1駆動機82および第2駆動機88によってエンドエフェクタを回転駆動させるために必要なトルクを小さくすることができる。したがってエンドエフェクタの重量が大きくなった場合に、第1駆動機82および第2駆動機88に必要なトルクの増加を抑えることができる。これによって従来技術の産業ロボットに比べて、高速動作を行うことができる。
(もっと読む)
アクチュエータ、これを用いた指ユニットおよび把持ハンド
【課題】 小型で簡素な屈曲機構を有し、大きな発生力するアクチュエータ、壊れやすい物体であっても破損することなく確実に把持することができる指ユニットおよび把持ハンドを得る。
【解決手段】 本発明のアクチュエータは、リンク部を有する骨格5a,5bと、骨格に設けられたエレクトロアクティブポリマーからなる伸縮部1aと、骨格と伸縮部を被覆する被覆部4とを備え、伸縮部へ電圧を印加して伸縮部を伸縮させることにより骨格を屈曲運動させるものであり、被覆部を伸縮度の大きい弾性体とし、リンク部は骨格の一方5aを伸縮部を挟むコ字状とし、骨格の一方と骨格の他方5bとをクランクアーム6により屈曲自在に結合したものである。
(もっと読む)
振動型アクチュエータ
【課題】制御が簡単であって、制御演算負荷が軽減された振動型アクチュエータを提供する。
【解決手段】回転体10が2自由度の回転運動を行い、回転体10には、回転体10のチルト方向に延伸した摩擦部材が設けられる。また円弧部を備えた振動体11が設けられ、この振動体11の内側の端が回転体10に対向するとともに、該内側の端の一部が摩擦部材に接触する。そして、振動体11に振動変位の方向が異なる複数の進行波を発生させ、回転体10の回転方向を変更するために、これら複数の進行波の位相差が制御される。
(もっと読む)
ロボットの関節構造
【課題】部品点数を少なくして、コストダウン並びに軽量化が可能で、組み立てが簡単にでき、また設計変更が容易なロボットの関節構造を提供することにある。
【解決手段】
本発明のロボットの関節構造は、側面にテーパ状に形成された凸部を少なくとも4つ有する連結部材と、対向する側面の両側または片側に凸部を設けたモータ部と、前記連結部材のテーパ状の凸部と嵌合するテーパ状の凹部、および前記モータ部の凸部が挿入される貫通孔が形成された略L字状保持部と、を備え、前記モータ部の凸部の中心軸はモータ部の回動軸上にあり、前記モータ部の凸部は前記略L字状保持部の貫通孔と回動可能に連結されることを特徴とする。
(もっと読む)
ロボットハンドの指ユニットおよび組立方法
【課題】粉塵の多い場所、クリーンルームなどにおいて使用するのに適した多関節指ユニットを提案すること。
【解決手段】多関節指ユニット1は、傘歯車を用いて構成された第1および第2関節部3、5を備えている。各関節部3、5では、先端が封鎖されている筒状ハウジング13、51の内部に、駆動側傘歯車10、44と従動側傘歯車14、56の噛み合い部分、および、関節軸15、57の軸受け部分が組みつけられており、筒状ハウジング13、51の後端の開口部13A、52は、指付け根部の筒状ハウジング7および指本体部の筒状ハウジング41によって塞がれている。関節部3、5の歯車の噛み合い部分、軸受け部分が実質的に密閉されており、これらの部分に外部から異物が侵入することを防止でき、これらの部分から外部に潤滑剤が漏れ出ることもない。
(もっと読む)
密閉型のウォームギヤ式指関節ユニット
【課題】関節軸を手動操作によって簡単に回すことのできる密閉型のウォームギヤ式指関節ユニットを提案すること。
【解決手段】ロボットハンドの密閉型のウォームギヤ式指関節ユニット1は、そのギヤボックスケース4に、ゴムブッシュ13によって塞がれた円形開口部82を備えている。ゴムブッシュ13を取り外すと、円形開口部82からウォーム軸部分11Aの軸端面11aが露出し、ここに形成されている工具係合部11bに外側からアクセス可能になる。工具係合部11bに、ウォーム軸部分11Aを回すための工具を差し込み、当該工具によってウォーム軸部分11Aを簡単に回すことができる。ウォーム軸部分11Aを回すとウォーム2が回り、これに噛み合っている出力側のウォームホィール3が回るので関節軸12が回り、その軸端部12a、12bに連結されている旋回アームを所定の位置に移動できる。
(もっと読む)
回転ジョイント構造
【課題】 ロボットの関節部分である回転ジョイントを動作させても、回転軸及び/又は出力軸に巻回された線状物が絡まったり破損することがなく、軽量かつコンパクトな回転ジョイント構造を提供する。
【解決手段】 一方のアーム側の回転軸を中心に回転する他方のアーム側の出力軸5と、前記回転軸及び/又は前記出力軸5に巻回された線状物15とを有する回転ジョイント構造であって、前記回転軸及び/又は前記出力軸5に前記線状物15を巻回するための螺旋状ガイド溝7,8が形成された。
(もっと読む)
関節装置、関節装置を用いたフィンガーユニット、及び、ユニバーサルロボットハンド
【課題】人の指のごとき微妙な動作を実現することが可能な関節装置、関節装置を用いたロボットフィンガー、及び、ユニバーサルロボットハンドを提供する。
【解決手段】一方のリンク部材Lに固定したフレクスプライン7と、その回転軸心Pと交差する方向に延出形成した薄肉部8aを他方のリンク部材Lに固定したサーキュラスプライン8とを備えてなるハーモニックドライブHを前記関節部材Jに組み込み、基端側リンク部材Lに収容したモータMの出力を基端側のウェーブジェネレータ6に伝達する第一の伝動機構T1と、前記モータMの出力を前記第一の伝動機構T1及び前記基端側リンク部材Lに隣接するリンク部材Lに収容した伝達シャフトSを介して前記基端側のウェーブジェネレータ6に隣接するウェーブジェネレータ6に伝達する第二の伝動機構T2を備える。
(もっと読む)
多関節ロボット
【課題】多関節アーム先端のツールハンドが可及的に広範囲の動作範囲を有するとともに、多関節アーム全体の稼動速度を可及的に高速度とすることができる多関節ロボットを提供する。
【解決手段】複数の関節アームを連接した多関節ロボット10であって、関節アーム同士が第1の旋回軸を介して接続されている箇所と、該第1の旋回軸に対して傾斜した第2の旋回軸を介して接続されている箇所とをそれぞれ少なくとも1箇所以上有しており、各旋回軸を駆動するモータおよび減速機94が各旋回軸ごとに装着されており、さらに、第1の旋回軸に対して直交する方向に回動する第3の回動軸をさらに備えており、該回動軸においてもモータおよび減速機が装着されている。多関節ロボットを構成する旋回軸または回動軸は7軸以上である。
(もっと読む)
モータ付直交軸減速機、直交軸減速機、及び、ロボットの関節構造
【課題】設置スペースを小さくすることができるモータ付直交軸減速機並びに直交軸減速機、及び、小型化を図ることができるロボットの関節構造を提供すること。
【解決手段】モータ付直交軸減速機1は、モータ取付け面部7a1と筺体支持面部7b1とが筺体4の同一面側に設けられているので、筺体4を相手部材に支持させる場合に、相手部材に支持させる面とは異なるいずれかの面側にモータ2が突出してしまうことを防止することができる。その結果、モータ付直交軸減速機を小型化できるので、設置スペースを小さくすることができる。また、モータ2が第1アーム30に包含されると共に第1アームがモータ付直交軸減速機1に外接されるので、ロボットの関節部分においてモータ付直交軸減速機1を露出させることができる。よって、アームの形状を簡略化することができるので、ロボットの関節構造の小型化を図ることができる。
(もっと読む)
平行リンク機構及び産業用ロボット
【課題】組み付けが容易な伝達機構によって2つのアームを回転させることのできる平行リンク機構及び産業用ロボットを提供することにある。
【解決手段】下端部を固定ベース2に回転可能に連結し、上端部を波動歯車減速機付き駆動モータ10の本体カバーに連結した第1アーム3と、下端部を波動歯車減速機部の第2出力軸29に、上端部を可動ベース40に回転可能に連結された第2アーム30とを備えている。また、第1アーム3及び第2アーム30よりも外側(左側)に設けられ、波動歯車減速機部の第1出力軸27に連結された連結ベース50を備えている。さらに、下端部を固定ベース2の延長フレーム部2aに、上端部を連結ベース50の下側延長片52aに回転可能に連結された第1補助リンク55と、下端部を連結ベース50の上側延長片52bに、上端部を可動ベース40に回転可能に連結された第2補助リンク56とを備えている。
(もっと読む)
産業ロボット
【課題】 旋回フレームの旋回及び各軸の複合動作に起因する周辺装置との干渉域を少なくし、水平方向に広い動作範囲を持った産業ロボットを提供。
【解決手段】固定ベース1の上に回転自在に支持された第1垂直アーム2と、第1垂直アーム2の先端に回転自在に支持された第2垂直アーム4と、第2垂直アーム4の先端に第3水平軸iの回りに回転自在に支持された第1回転基台5と、第1回転基台5の上に第2水平軸bと直交する第3水平軸cの回りに回転自在に支持された傾動アーム6と、傾動アーム6に第1垂直軸dの回りに回転自在に支持された第1水平アーム9と、第1水平アーム9の先端に第2垂直軸eの回りに第1水平アーム9と相対するように回転自在に支持された第2水平アーム10とを有する。
(もっと読む)
161 - 180 / 234
[ Back to top ]