
Fターム[3C007CX01]の内容
マニピュレータ、ロボット (46,145) | 関節 (545) | 関節部に駆動源を有するもの (234)
Fターム[3C007CX01]に分類される特許
141 - 160 / 234
アーム駆動装置及び産業用ロボット

【課題】アームの動作速度と動作精度を高めることができるアーム駆動装置を提供する。
【解決手段】関節部により連結された複数のアームを伸縮動作させることができるアーム駆動装置1において、基台9上の第1関節部2に回転可能に連結された第1アーム5と、第1アーム5の先端側に位置する第2関節部3に回転可能に連結された第2アーム6と、第2アーム6の先端側に位置する第3関節部4に連結された第3アーム10と、第1アーム5の第1関節部2側に設けられた第1タイミングプーリ11と、第1アーム5の第2関節部3側に設けられた第2タイミングプーリ12と、第1タイミングプーリ11と第2タイミングプーリ12との間に掛け渡され、第1アーム5が回転したときの第2アーム6の回転量を規制する第1タイミングベルト15と、第1関節部2及び第2関節部3の一方又は両方に、第1アーム5及び第2アーム6それぞれに回転力を伝達する合計2以上の駆動源7,25とを備えるように構成する。
(もっと読む)
脚式移動ロボット

【課題】アクチュエータのパワーを高めることなく、前進方向への移動性能を向上させた脚式移動ロボットを提供すること。
【解決手段】本発明にかかる脚式移動ロボット10は、脚部における複数の関節のそれぞれに設けられたアクチュエータを駆動して揺動軸回りに動作させることによって歩行動作を行うものである。複数の関節のうち、例えば、腰ロール関節42の揺動軸を脚式移動ロボット10の前方向から45度に配置し、腰ピッチ関節43の揺動軸を脚式移動ロボット10の前方向から45度に配置する。
(もっと読む)
フロッグレッグアームロボット及びその制御方法
【課題】機構を複雑化させることなく制御上の特異点を通過する。
【解決手段】アーム部2が現在の姿勢から上記駆動モータ5の駆動により、所望の姿勢を含む複数の姿勢に移行可能な姿勢である特異点姿勢を通過する際に、ハンド部3を減速させる制御手段4を備える。
(もっと読む)
日常生活支援ロボットアーム装置
【課題】日常生活で、自らの腕のように操作できる小型、軽量、安全な日常生活支援ロボットアーム装置を実現する。
【解決手段】互いに多関節状に接続される複数のアーム構成要素は、平行リンクを構成する駆動リンク6、12および従動リンク5、11を備えたアーム構成要素を含み、駆動リンク17を備え従動リンクを備えていないアーム構成要素を含み、駆動リンク6、12、17および従動リンク5、11は、それぞれ両端が、支持体3、9、15、20のいづれかに回転可能に取り付けられており、駆動リンク6、12、17は、その一端において回転軸を介していづれかの支持体3、9、15に付設されたモータにより駆動され、従動リンク5、11や駆動リンク17には、いづれかの支持体9、15、20との間でバネ8、14、19とダンパー26、28、30が装着されていることを特徴とする日常生活支援ロボットアーム装置35を提供する。
(もっと読む)
ロボットフィンガー又はロボットアームのためのモータ駆動式ジョイント・リンク・ユニット、及びそのためのシステム
本発明は、旋回軸を有するジョイント(12、12a)と、前記ジョイントに配設されたリンクと、前記旋回軸周りに前記リンクを旋回するためのモータ(22、22a)とを備えるロボットフィンガーまたはロボットアームのためのモータ駆動式ジョイント・リンク・ユニット(10、10a)に関する。本発明は、ジョイントが第1ジョイント部と、前記第1ジョイント部(20、2a)に伝動装置を介して運動連結された、旋回軸周りに旋回可能の第2ジョイント部とを有し、第1ジョイント部に伝動装置を駆動するモータが旋回軸に対して横方向に配設されており、かつリンクが取付状態でモータが収容されている少なくとも片側で開いた中空体として形成されていることを特徴とする。 (もっと読む)
アクチュエータ制御装置
【課題】ロボット・ハンドなどに適用可能となる十分な出力の力制御を実現する。
【解決手段】電気モータなどの応答性の高いアクチュエータと、人工筋肉やバネ要素などの応答性の低いアクチュエータを併用して、ロボット・ハンドなどに適用可能となる十分な出力の力制御を実現する。外乱オブザーバを利用して人工筋肉やバネ要素などの出力を関節の摩擦などの外乱と同時に推定し、電気モータの制御にフィードバックすることで、電気モータの高応答性と人工筋肉やバネ要素の高出力特性をともに活用した力制御を実現する。
(もっと読む)
ロボットの関節機構
【課題】1つの駆動源により複数の関節をそれぞれ駆動させることができる関節機構を提供することを課題とする。
【解決手段】ロータ4を回転して出力軸部材5をステータ2に対し傾動すると、出力軸部材5の傾動に伴って第1節B、第2節C及び第3節Dが互いの相対姿勢を保持したままステータ2に対し傾動する。ロータ4を回転して出力軸部材5をそれ自身の軸回りに回転すると、出力軸部材5の回転に伴って第1の傘歯歯車6が回転することにより、第2の傘歯歯車8が第2関節の軸S1の回りに回転して第2節Cが第1節Bに対し傾動する。また、このとき、第1の傘歯歯車6の回転に伴って第3の傘歯歯車9も回転することにより、第4の傘歯歯車10及び第5の傘歯歯車11を介して第6の傘歯歯車12が第3関節の軸S2の回りに回転して第3節Dが第2節Cに対し傾動する。
(もっと読む)
ロボット等の旋回部構造
【課題】ロボット等の旋回部構造を構造が簡単でかつ安価とする。
【解決手段】駆動モータ50の駆動回転力を出力軸51に固定された外歯車52から特定の1つのクランクピン37aに固定された外歯車53に直接伝達して偏心差動型減速機17のクランクピン37aを回転させるようにしたので、モータの回転駆動力を両端部に外歯車を有する円筒体を介してクランクピンを回転させる場合に比較し、モータの外歯車に噛み合っている円筒体の外歯車を省略することができ、これにより、構造が簡単で安価となる。
(もっと読む)
ツーウェイクラッチ及び関節部構造
【課題】軽量で、バックラッシュの無いツーウェイクラッチ及び関節部構造を提供する。
【解決手段】本発明のツーウェイクラッチ1では、係合子が軸方向に互いに重複しない位置に配置された第1の係合子8と第2の係合子9とからなる。第1の係合子8は第1の保持器10により保持され、第2の係合子9は第2の保持器11により保持されている。第1の係合子8が円筒面3とカム面5に係合して内方部材2と外輪4の一方向の相対回転を阻止するとともに第2の係合子9が円筒面3とカム面5に係合して内方部材2と外輪4の他方向の相対回転を阻止する状態とすることにより内方部材2と外輪4の両方向の相対回転を阻止する。
(もっと読む)
ロボット関節機構およびその駆動方法
【課題】耐衝撃性能、指令応答速度性能およびレイアウト性能を向上することが可能なロボット関節機構を提供する。
【解決手段】ロボット関節機構Aは、モータA11と、モータA11の出力を減速する減速機構A12と、減速機構A12に連結された弾性部材A21と、弾性部材A21に連結され、減速機構A12および弾性部材A21を介して伝達されたモータA11の出力を増速し、負荷部材A3に伝達する増速機構A22と、負荷部材A3と、を備えている。
(もっと読む)
3自由度能動回転関節
【課題】各自由度方向からなる任意の方向への一様な回転運動が可能であり、球関節に近いシンプルな構造を有する3自由度能動回転関節を提供する。
【解決手段】X軸用、Y軸用、Z軸用の中空軸回転型モータ20x、20y、20zの中空軸に挿設された出力軸21x、21y、21zに結合する回転球10と、中空軸回転型モータ20x、20y、20zをそれぞれ、それ自身の軸線まわりの回転を規制するとともに、他の直交2軸まわりのうち一方への回動を許容するように支持する可動支持体30x、30y、30zと、可動支持体30x、30y、30zをそれぞれ前記他の直交2軸まわりのうち他方への回動を許容するように支持する支持体50とを備え、一方のリンク60aがZ軸用の中空軸回転型モータ20zの後端から突出する出力軸21zに同軸上に固定され、他方のリンク60bが支持体50の支持端部50zの外面側に固定される。
(もっと読む)
ロボット等の旋回部構造
【課題】ロボット等の旋回部構造を構造が簡単でかつ安価とする。
【解決手段】駆動モータ50の駆動回転力を出力軸51に固定された外歯車52から特定の1つのクランクピン37aに固定された外歯車53に直接伝達して偏心差動型減速機17のクランクピン37aを回転させるようにしたので、モータの回転駆動力を両端部に外歯車を有する円筒体を介してクランクピンを回転させる場合に比較し、モータの外歯車に噛み合っている円筒体の外歯車を省略することができ、これにより、構造が簡単で安価となる。
(もっと読む)
ロボット等の旋回部構造
【課題】ロボット等の旋回部構造を構造が簡単でかつ安価とする。
【解決手段】駆動モータ50の駆動回転力を出力軸51に固定された外歯車52から特定の1つのクランクピン37aに固定された外歯車53に直接伝達して偏心差動型減速機17のクランクピン37aを回転させるようにしたので、モータの回転駆動力を両端部に外歯車を有する円筒体を介してクランクピンを回転させる場合に比較し、モータの外歯車に噛み合っている円筒体の外歯車を省略することができ、これにより、構造が簡単で安価となる。
(もっと読む)
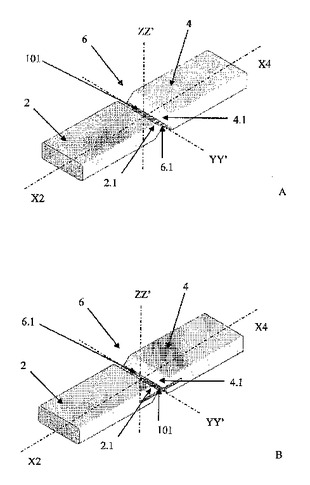
ロボット用の或いは触覚インターフェース用の継手付き肢部並びにそのような継手付き肢部を含むロボット及び触覚インターフェース
本発明の主要目的は、少なくとも第一(2)及び第二(4)の剛性セグメントと、継手(6)とを含む、ロボット又は触覚インターフェースのための継手付き及び器具付きリブであり、前記継手(6)は、繊維と、少なくとも1つの測定素子(101,102)とを含み、剛性セグメント(2,4)のそれぞれの内に固定される。本発明は、目的のために、少なくとも1つのそのような継手付き肢部を含むロボット又は感触インターフェースも有する。
 (もっと読む)
(もっと読む)
産業用ロボットのアーム構造体
【課題】アーム構造体のケーシングの軽量化および小型化を行う。
【解決手段】産業用ロボットのアーム構造体(10)が、第一軸線(X)および第一軸線に対して垂直な第二軸線(Y)回りに回転可能な手首ユニット(61)と、手首ユニットを第一軸線回りに回転可能に支持するアームユニット(10’)とを含む。アームユニットは底部ケーシング(12)を具備し、底部ケーシングには、手首ユニットを第一軸線回りに回転させるのに用いられる第一モータ(31)と、手首ユニットを第二軸線回りに回転させるのに用いられる第二モータ(32)とが少なくとも配置されている。さらに、アームユニットは、モータの出力軸の両方を含む平面に対して垂直な方向において底部ケーシングに係合する蓋部ケーシング(11)を具備する。
(もっと読む)
直線移動装置
【課題】ベースから移動体への配線のためのスペースを小さく済ませ、構成の簡単化を図る。
【解決手段】フレーム12内に、移動体15を左右方向に直線移動可能に支持する金属製の2本のスライドシャフト20,21を設け、移動体15に、それらスライドシャフト20,21の外周に摺動可能に嵌挿されるスライドブッシュ24,25を設ける。フレーム12に、駆動用モータ17、ボールねじシャフト13、ボールねじナット16等からなる駆動機構を設ける。スライドシャフト20,21の左端部に、電力用一次側巻線27,信号用一次側巻線28を巻装する。スライドブッシュ24,25に、電力用二次側巻線29,信号用二次側巻線30を設ける。一次側巻線27,28に交流電流を流し、電磁誘導作用により、二次側巻線29,30に電力,信号を伝達する。
(もっと読む)
直角プーリ駆動機構付きの手術マニピュレータ
本発明は、マニピュレータアーム(408)と、ロボットアームにより保持されたエンドエフェクタ(428)と、エンドエフェクタ(428)により保持された手術ツール(430,560,630,700)と、マニピュレータ関節とを含む手術マニピュレータ(400)を提供し、特に、コンパクトかつ軽量な手術マニピュレータを実現するため、一つの軸線から垂直な軸線へ回転運動を伝達する直角駆動装置(10)を提供する。 (もっと読む)
真空用ロボットおよびそのモータ
【課題】半導体製造装置や液晶製造装置における真空容器内で使用されるロボットにおいて、容器内の圧力上昇を低減でき、また、発塵による搬送対象物のワークや周囲環境への汚染をさせることなく、小型、軽量化が図れ、かつ製品の信頼性を向上させることが可能な真空ロボットを提供する。
【解決手段】アーム部を駆動するモータ部5において、ロータ部14とステータ部8の電磁ギャップの隙間に、ステータ部8をハウジング9に内包して密封するように固定される薄板円筒状のキャン16を設けて形成された空間15が、減圧された状態で封止されて維持されるように構成した。
(もっと読む)
ロボット用連結部材の結合機構と歩行型ロボット
【課題】歩行型ロボット等において、外部から衝撃が加わったときにサーボ装置内の減速ギヤの破壊を防止する結合機構を提供する。
【解決手段】モータ、減速ギヤ等が内蔵されているサーボ装置の筐体10から突出している出力軸11に、サーボホーン12を嵌合すると共に、このサーボホーン12の接合面に外部に力を伝達するための連結部材13がワッシャ14を介して挿通されている止めネジ15によって圧接されている。サーボホーン12と連結部材の接合面には凸部12bが形成され、連結部材13の方には、この凸部12bと衝合する位置に凹部が設けられているので、連結部材13に外部から強い衝撃が印加されると、連結部材13とサーボーホーン12の結合状態が瞬間的に解除され、サーボ装置内の減速ギヤ等が破損することを防止する。
(もっと読む)
駆動装置及び関節装置
【課題】小型かつ減速比を容易に変更し得る駆動装置を実現する
【解決手段】モータ12の出力軸12out及び減速機13の入力軸13inが同側になるように当該モータ12及び減速機13を並列に配置し、出力軸12outと入力軸13inの間を伝達手段15で伝達するようにしたことにより、駆動装置10の出力軸方向の寸法を削減できるともに、伝達手段15の減速比を変更するだけで、同一の減速機12を用いて駆動装置10の総減速比を容易に変更することができる。
(もっと読む)
141 - 160 / 234
[ Back to top ]