
Fターム[3C269AB12]の内容
数値制御 (19,287) | 作業内容、対象機器、対象製品 (2,914) | 溶接、溶断 (136)
Fターム[3C269AB12]に分類される特許
1 - 20 / 136
操作装置および可動機械制御システム
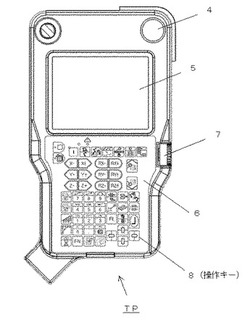
【課題】操作装置に配置されたキーの名称を各言語に対応させる場合は、各言語に応じたキーシート等を在庫として用意しておき、出荷国に応じた貼付作業を行う必要があるために、その分の管理コストや製造工数を必要とする。
【解決手段】操作装置TPは、制御対象を操作するための複数の操作キー8がレイアウトされた操作部6と、操作キーの入力に応じた画面が表示される表示部5とを有している。操作部6には操作キーの名称が印字されていない。操作装置TPの本体または接続先のコントローラは、操作キーの名称をガイドするためのガイド情報を記憶する記憶手段を備える。そして、所定の操作が行われると、操作キーの名称および画像が各言語に応じて表示部5に表示される。本発明により各国に応じた作業が不要になるというメリットがあると同時に、作業者は、これまでと同様に操作キーの名称を容易に知ることができる。
(もっと読む)
制御方法及び制御装置

【課題】産業用ロボットなどの制御対象の周期的な挙動幅(往復移動の振幅)を、減速機にバックラッシュがない場合と同じにする、又は位置指令信号の振幅と同じにすることできる制御方法及び制御装置を提供する。
【解決手段】周期的な運動を行うアーム5のバックラッシュを補償しつつアーム5の位置制御を行う制御装置3において、アーム5の位置を指示する位置指令信号にバックラッシュを補償するバックラッシュ量信号をシフトしたうえで加算し、最終位置指令信号を生成して、生成した最終位置指令信号に基づいてアーム5の位置制御を行う制御部15を備える。
(もっと読む)
プログラム生成装置及びその方法
【課題】プログラミング生成装置におけるロボット自動生成処理において、編集作業が容易となるようジョイント(Joint)動作を直線に分割する。
【解決手段】ロボットの動作を制御するための動作プログラムを軌跡情報に基づき生成するプログラム生成装置1である。そして、前記軌跡情報は複数の動作点を有し、前記複数の動作点の中から適数の動作点を選択する選択手段と、前記選択された動作点を直線でつなげて直線動作に係る変更後の軌跡情報を生成する軌跡情報変更手段とを備える。
(もっと読む)
ロボットとその制御方法
【課題】ロボットが複数の動作を実行する場合に、そのうちの特定の動作に制限されずに、各動作における条件の変化を考慮して、各動作において正常動作中に誤作動することなく過負荷を確実に検出し安全に停止させることができるロボットとその制御方法を提供する。
【解決手段】複数の動作を実行するロボット10の制御方法であって、エンドエフェクタ12に作用する外力を検出する力センサ14と、3次元空間内でエンドエフェクタの位置と姿勢を移動可能なロボットアーム16と、ロボットアームを制御するロボット制御装置20とを備え、(A)外力の閾値をロボットの動作毎に記憶し、(B)ロボットアームを制御して各動作を順次実行し、(C)各動作の実行中に力センサで検出された外力が、前記閾値を超えた場合に、ロボットアームを停止する。
(もっと読む)
学習制御機能を備えたロボット
【課題】従来、学習制御器の調整は経験に基づいて試行錯誤で行われており、調整が難しいという問題があった。
【解決手段】本発明のロボットは、位置制御の対象とする部位にセンサを備えたロボット機構部(1)と、ロボット機構部の動作を制御する制御装置(2)とを含み、制御装置(2)は、ロボット機構部の動作を制御する通常制御部(4)と、作業プログラムに指定された教示速度に、速度変化比を乗算した速度指令にてロボット機構部(1)を動作させたときに、センサにより検出された結果から、ロボット機構部の制御対象の軌跡又は位置を目標軌跡又は目標位置に近づけるため、もしくは制御対象の振動を抑制するための学習補正量を算出する学習を行う学習制御部(3)と、を有し、ロボット機構部の制御対象位置が速度変化比に依らず一定の軌跡を移動するように処理を行うことを特徴とする。
(もっと読む)
溶接ロボット制御装置
【課題】
レーザセンサを用いて相対位置方式により教示点の位置補正を行う場合、レーザセンサの着脱等により溶接トーチとの取付位置関係が狂うと、教示修正に多大な時間を要する。
【解決手段】
S10でレーザセンサと溶接トーチ間のキャリブレーションを行い、新センサ−トーチ変換行列CT2Tを得て、S20で記憶部に格納する。S30で差分変換行列OTNの演算を行う。S40で予め選択しておいた作業プログラムに対して、センシング命令に記憶された検出基準点を探索する。S50で、見つけ出した検出基準点に対してそれぞれ差分変換行列OTNを乗算して、検出基準点を更新する。
(もっと読む)
溶接位置検出方法、及び溶接位置検出装置
【課題】
溶接線の進行方向が大きく変化するワークに対してセンシングを行う場合、進行方向の変化に応じてロボットの姿勢を変更する必要がある。このため、教示に時間を要したり、ロボットがワークや治具等と干渉したりする。
【解決手段】
マニピュレータM1に取付けられた溶接トーチ14に対して開先位置検出センサLSが可動機構62を介して設けられる。溶接線の進行方向が変化する場合は、開先位置検出センサLSの溶接トーチ14に対する相対位置であるセンシング位置を、ロボットの姿勢変更により変更するのではなく、可動機構62により変更するようにしている。教示工数低減、干渉低減を図ることができる。
(もっと読む)
ロボット、及びロボットの制御方法
【課題】最大定格出力に近い駆動条件であっても、本来の駆動性能を発揮することが可能なロボットを提供すること。
【解決手段】多軸ロボットは、第1の駆動電圧を供給する第1電源回路1と、第1の駆動電圧よりも高い電圧である第2の駆動電圧を供給する第2電源回路2と、第1電源回路1と第2電源回路2とを切り替えるスイッチ21〜26とを備えている。そして、モーター部11〜16の駆動条件を規定する制御信号が所定の閾値以上になった場合に、スイッチ21〜26を駆動して第1電源回路1から高電圧の第2電源回路2に切り替えることにより、十分な駆動電圧が確保されるため、期待通りの動作を行うことができる。換言すれば、制御信号から駆動電力が不足しそうな状況を予測して、第2電源回路2に切り替えることにより、決められた作業時間(タクトタイム)で、作業に必要な動作を行うことができる。
(もっと読む)
学習制御機能を備えたスポット溶接ロボット
【課題】従来のスポット溶接ロボットは、ロボットの高速動作によって発生する軌跡誤差や振動成分によって、ロボットの最適動作が阻害されるという問題があった。
【解決手段】本発明のスポット溶接ロボットは、制御対象部位とセンサとを備えたロボット機構部(1)と、制御対象部位の目標軌跡または目標位置に関する位置指令データを取得し、位置偏差データに従って、ロボット機構部を所定の動作速度で動作させる動作制御部(4)と、センサの検出結果から制御対象部位の軌跡または位置を算出し、軌跡誤差または位置誤差を補正するための、もしくは振動を抑制するための、学習補正量を算出する学習制御部(3)と、を有し、動作制御部は、学習補正量を用いて位置偏差データを補正し、学習制御部は、学習補正量を算出する過程で、最大動作速度に至るまで1回又は複数回に渡って動作速度を増加させながら学習補正量を算出する、ことを特徴とする。
(もっと読む)
加工条件探索装置
【課題】少ない実験数で最良の加工条件を探索することができるとともに、加工結果の良否評価に誤りがある場合でも、その誤りの影響を解消して、適正な加工条件を生成することができるようにする。
【解決手段】加工特性モデル生成部25により生成された新たな加工特性モデルを用いて、次の実験加工条件を生成する実験加工条件計算部21や、加工結果収集部12により蓄積された実験加工データ毎に、当該実験加工データ内の加工結果に含まれている加工良否評価を1つずつ変更する加工結果評価一部変更部27などを設ける。
(もっと読む)
ロボットの関節の原点補正方法およびそのシステム
【課題】高精度且つ安価にロボットの関節を原点補正する。
【解決手段】第1の姿勢P1(l)のロボット12のマーカー22が撮影画像に写る位置にカメラ16を設置する。各関節用のエンコーダの出力値に基づいて、原点補正対象の関節12lに予め対応付けされた関節のみを動かすことにより、カメラ16の撮影画像上において第1の姿勢時のマーカー22の位置の近傍にマーカー22が写るような第2の姿勢P2(l)に変更する。ロボット12の姿勢変更によるカメラ16の撮影画像上におけるマーカー22の変位に基づいて、原点補正対象の関節12lの原点補正を行う。
(もっと読む)
ロボットシステムの教示データ作成方法及びロボットシステムでの溶接方法
【課題】断続溶接を確実に行うことができると共に、溶接作業時間を可及的に短くすることのできるオフライン教示データの作成方法を提供する。
【解決手段】本発明に係るロボットシステム1のオフライン教示データの作成方法は、断続溶接の溶接予定線に沿って設定されている溶接区間及び非溶接区間の順番及び区間長さ比を、溶接予定線を溶接する際にスライダ7が移動するスライダ移動線に適用することで、当該スライダ移動線上に、溶接区間に対応する第1スライダ移動区間と、非溶接区間に対応する第2スライダ移動区間とを設定しておき、少なくとも1つ以上の溶接区間での溶接が終わった際に、スライダ7が当該溶接区間に対応する第1スライダ移動区間に隣接する第2スライダ移動区間内に位置するように、教示データを作成する。
(もっと読む)
溶接ロボットの一時停止解析装置および一時停止解析プログラム
【課題】様々な状況下におけるチョコ停の改善に寄与することができるとともに、経験と知識がない場合であってもチョコ停の対策を行う箇所を容易に特定することができる溶接ロボットの一時停止解析装置および一時停止解析プログラムを提供する。
【解決手段】一時停止解析装置3は、ロボットコントローラ2から、ロボット位置情報と、ロボット動作情報と、溶接条件情報と、動作エラー情報と、を取得する取得手段31と、ロボット位置情報、ロボット動作情報、溶接条件情報および動作エラー情報と、これらに対応する一時停止の推定原因および一時停止の修正方法と、が予め記載されたテーブルを参照することで、溶接ロボット1の一時停止の原因とその修正方法を解析する解析手段32と、解析手段32が解析した解析結果を出力する出力手段33と、を備える。
(もっと読む)
多関節型ロボットの制御装置,制御方法及び制御プログラム
【課題】多関節型ロボットの作業部の位置及び移動速度を維持しつつ,第1関節駆動系の駆動軸各々の角度を確実に作業終了点の角度に到達させること。
【解決手段】例外条件が充足していない場合はステップS5で算出される補間点に基づいて第1及び第2関節駆動系の駆動軸各々を駆動する(S64)。例外条件が充足した後(S61のYes側),作業部が作業終了点に到達するまでの間は(S12のNo側),第1関節駆動系の駆動軸各々を作業終了点の角度を目標として線形に変化させるための該第1関節駆動系の駆動軸各々の角度を算出すると共に(S8),該算出された第1関節駆動系の駆動軸各々の角度とステップS5で算出された補間点における作業部の位置とに基づいて第2関節駆動系の駆動軸各々の角度を算出し(S9),該算出結果に従って第1及び第2関節駆動系の駆動軸各々を駆動させる(S11)。
(もっと読む)
ロボットの外部軸の計測方法、ロボットの教示データ作成方法、およびロボットのコントローラ
【課題】ポジショナ回転軸のロボットに対する相対的な位置姿勢を高精度に計測する。
【解決手段】
ロボット10に作業されるワークWを把持するポジショナ12の回転軸Arまたは直動軸の該ロボット10に対する相対的な位置姿勢を計測するロボット10の外部軸の計測方法であって、ポジショナ12の回転軸Arまたは直動軸に対する所定の位置に定義された計測点Pmにロボット10の基準点Ptが手動によって位置合わせされた状態の該ロボット10の姿勢を、基準点Ptが計測点Pmに位置合わせされた状態を維持しつつ計測姿勢に変更する。計測姿勢として、(1)関節10a〜10fそれぞれにおける、ポジショナ12が把持するワークWに対して作業を実行するときの作業姿勢時の関節値と計測姿勢時の関節値との間の差分値と、(2)関節10a〜10fそれぞれに対して予め定義されている重み値とに基づいて、作業姿勢に対する類似の程度が高い姿勢を決定する。
(もっと読む)
レーザ加工ロボットの教示方法及び教示装置
【課題】レーザ加工ロボットの教示作業を容易且つ正確に行えるようにする。
【解決手段】測定レーザと加工レーザとを出力するレーザスキャナを有し、加工レーザをワークに照射してレーザ加工を行うレーザ加工ロボットの教示方法が、ワーク上の基準照射位置を基準として予め定められた基準図形に基づき測定レーザをワーク上に照射する際に、測定レーザの照射位置を制御する制御手順S4と、レーザスキャナから照射された測定レーザが、ワークにおいて反射された反射光を測定する測定手順S5と、反射光と基準図形を比較し、基準照射位置におけるワークの表面の傾斜を算出する傾斜算出手順S6と、傾斜算出部が算出した傾斜から前記ロボットの姿勢に関する教示データを作成するデータ作成手順S7と、を有する。
(もっと読む)
制御装置およびロボットアームの制御方法
【課題】本発明は、多関節型ロボットアームの滑らかな動作を実現することができる制御装置を提案する。
【解決手段】
本発明の制御装置2は、第一駆動モータ、第二駆動モータ、および第三駆動モータにかかる負荷イナーシャ、重力トルク、モータトルク、ならびにモータイナーシャに加えて、ばね装置のトルク、ならびに第一駆動モータ、第二駆動モータ、および第三駆動モータそれぞれの動力を伝達するための駆動系部材列のイナーシャである駆動系イナーシャのうちの少なくともいずれか一つを用いて、第一駆動モータ、前記第二駆動モータ、および第三駆動モータの角加速度を算出する加速度算出手段を備える。
(もっと読む)
ロボットシステム
【課題】動作プログラム内の命令を動作プログラムの変更履歴データを用いて修正する場合、従来はプログラム全体の全ての履歴を時系列に検索していくことになり、所望の変更履歴データを得るまでに多くの時間を要するという課題があった。
【解決手段】表示中の動作プログラムで命令を選択し、選択している命令に関する変更履歴を抽出して表示し、抽出された履歴情報のなかから所望の履歴情報を選択することで、選択している命令の内容を、所望の履歴情報に変更することにより、動作プログラムの変更に掛かる時間を少なくすることができる。
(もっと読む)
ロボット教示データの算出方法およびロボットのコントローラ
【課題】第1のロボットの動作を第2のロボットに実行させる。
【解決手段】第1のロボットRAの動作を第2のロボットRBが実行できるように、第1のロボットRAに対する第1の教示データθAから第2のロボットRBに対する第2の教示データθBを算出するロボット教示データの算出方法であって、第1の教示データθAに対する第1のロボットRAの基準点SAの位置PAを、第1の教示データθAと第1のロボットRAの構成内容を示す第1のロボット構成データとに基づいて算出し、前記算出した位置PAに第2のロボットRBの基準点SBが位置するための第2の教示データθBを、前記算出した位置PAと第2のロボットの構成内容を示す第2のロボット構成データとに基づいて算出する。
(もっと読む)
ロボット制御装置
【課題】ユーザ座標系を作業領域に応じて自動的に選択する場合、光電センサ等の導入が必要である。またはユーザ座標系の設定に加えて作業領域の複雑な設定が必要である。
【解決手段】アーム先端に取り付けられたツールを操作手段からの操作信号によりジョグ送りする際に、ツールが予め定められた作業領域に侵入したことを検知して、所定の軸方向を有するユーザ座標系を自動的に選択するロボット制御装置である。このロボット制御装置に作業領域自動設定手段を備える。すなわち、ユーザ座標系の原点Orを含んだ所定形状を有する領域を作業領域Qとして自動設定する。所定形状とは、原点Orを中心位置とした予め定めた半径長さDrを有する球体である(c)。または、予め定めた辺長さDx〜Dzを有する直方体である(b)。作業領域Qの中心位置となるユーザ座標系の原点は、シフトできるとさらに良い。
(もっと読む)
1 - 20 / 136
[ Back to top ]