
Fターム[3C269QE01]の内容
数値制御 (19,287) | 表示内容、監視、記録内容 (1,309) | 図形を用いて表示するもの (564)
Fターム[3C269QE01]の下位に属するFターム
作業空間全体を表示 (63)
作業対象、ワークを表示 (215)
工具、作業具の形状を表示 (53)
3次元図形、立体画を用いるもの (153)
Fターム[3C269QE01]に分類される特許
21 - 40 / 80
工作機械の振動抑制装置及び方法
【課題】加工効率を低下させることなくびびり振動の好適な抑制を行う。
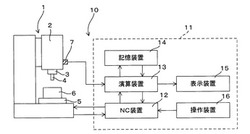
【解決手段】振動抑制装置10の制御装置11は、NC装置12と、振動センサ7から検出される時間領域の振動加速度をもとにしたフーリエ解析を行う演算装置13と、演算装置13で演算された演算値やびびり振動の抑制履歴等を記憶する記憶装置14と、演算装置13にて演算された結果、もしくはその結果を基にした計算結果を表示する表示装置15と、NC装置12にオペレータが入力操作する操作装置16とを備え、びびり振動の発生が検出されると、演算装置13はびびり振動周波数の60倍の数値を工具刃数と前記回転軸の回転速度との積で除してk’値を算出し、算出されたk’値が1未満か否かを判別する。k’値が1未満であれば、回転速度を上昇側へ変更してびびり振動を抑制する。
(もっと読む)
振動表示装置

【課題】工作機械の振動状況を明確に把握することができる振動表示装置を提供する。
【解決手段】演算装置14において、記憶装置13に記憶されている加工条件や工具情報にもとづき、工作機械に発生するびびり振動の周波数域を推定し、びびり振動が表示装置15において明確に表示されるように、表示装置15における振動状況の表示態様を選択したり、所定の周波数近傍を拡大して表示したりするようにした。具体的には、加工条件及び工具情報にもとづいて重切削であるか否かを判断し、重切削である場合には横軸を対数とした表示態様を選択する。また、重切削でない場合には、工具情報にもとづいて工具の固有振動数を算出できたか否かを判断し、工具の固有振動数が算出されている場合には固有振動数の近傍を拡大して表示する。
(もっと読む)
工作機械
【課題】たとえ経験の浅い作業者等であっても、びびり振動を抑制しやすく、ひいては歩留まりの向上等を図ることができる工作機械を提供する。
【解決手段】びびり振動が発生した際に所定のパラメータを変更することで、変更後のパラメータの値に応じた振幅Q及び周期Rで主軸2の回転速度を変動させるものにおいて、そのパラメータに係る情報をパラメータ表示制御部11が表示手段9へ表示する。したがって、作業者は表示手段9における表示を参考にしてパラメータを変更し、主軸2の回転速度の振幅Q及び周期Rを変更することができる。そのため、経験の浅い作業者であっても、従来より容易にびびり振動を抑制させることができ、ひいては歩留まりの向上も図ることができる。
(もっと読む)
工作機械の振動抑制装置
【課題】再加工の際にもびびり振動を発生させずに加工を行えるようにする。
【解決手段】加工中にびびり振動が発生し、回転速度の変更によってびびり振動の発生が抑制された場合(S1〜S8)、演算装置は、S9で変更の前後の回転速度を対にして記憶装置に記憶する。そして、新たな加工を行う場合、S1で回転速度を入力すると、NC装置は、S2で、入力された回転速度が記憶装置にあるか否か、すなわち記憶されている対の回転速度のうち、変更前の回転速度と同じか否かを判別する。ここで、入力された回転速度が前回の変更前の回転速度と同じ場合、S11で、これと対になっている変更後の回転速度で主軸を回転させる。
(もっと読む)
工作機械における主軸回転速度のモニタ方法及びモニタ装置、工作機械
【課題】主軸の回転速度を変動させるための設定値が容易に選択でき、びびり振動の抑制に最適な加工条件を見出すことができるようにする。
【解決手段】モニタ装置において、変動値設定部のモニタに、回転速度の変動振幅と変動周期との関係を示すグラフを表示し、そのグラフに現在の変動位置(第1点)を黒丸のマーカーで表示すると共に、所定の式に基づいてモータの変動周期の電力限界線Lを作成してグラフ上に表示して、電力限界線L以下の範囲内で、現在の変動位置よりも変動振幅が大きく、且つ変動周期が短くなる新たな変動位置を算出して、新たな変動位置(第2点)を、現在の変動位置からの変更を案内する矢印Aと共にグラフに表示する。
(もっと読む)
工作機械のモニタ方法及びモニタ装置、工作機械
【課題】振動に係る現在の加工状態を迅速且つ容易に把握でき、最適な加工条件を効率よく導き出すことができるようにする。
【解決手段】立形マシニングセンタのモニタ装置は、加工に伴う振動を検出する振動センサと、主軸の回転を検出する回転検出器及び回転検出部と、振動センサによって検出された振動情報と回転検出器及び回転検出部によって検出された主軸の回転速度とに基づいて、回転速度と加工の安定限界との関係を表す安定限界線図及び回転速度と振動との関係を表す振動分布図をそれぞれ作成し、モニタに両図を上下に並べて表示する安定限界及び振動分布計算部とを備える。安定限界及び振動分布計算部は、現在の主軸回転速度を回転速度の軸に直交して安定限界線図F1と振動分布図F2とに跨る直線Lで表示する。
(もっと読む)
工作機械のモニタ方法及びモニタ装置、工作機械
【課題】強制びびり振動と再生型びびり振動とを区別してびびり振動の発生状況をオペレータに通知することにより、効果的にびびり振動を抑制できる加工条件を選択することができるようにする。
【解決手段】立形マシニングセンタのモニタ装置は、加工が開始されると、主軸の回転速度とびびり振動の発生とを検出すると共に、検出されたびびり振動の種類を判定し、判定されたびびり振動に係る振動情報と検出された回転速度とに基づいて、グラフ18を作成してモニタ17に表示する。このグラフ18は、横軸が主軸回転速度、縦軸が加速度となって、発生したびびり振動の加速度を主軸回転速度に応じてマーカー19,19・・で表示すると共に、再生型びびりを三角形、強制びびりを四角形として区別している。また、各マーカー19にはびびり振動の種類に応じた色分けもなされている。
(もっと読む)
稼動履歴管理方法、及び稼動履歴管理装置
【課題】びびり振動の発生状況と工作機械の稼働状況とを関連づけて把握することができ、びびり振動の容易で且つ効果的な抑制を図ることができる稼動履歴管理方法、及び稼動履歴管理装置を提供する。
【解決手段】少なくとも回転軸の回転速度及び周波数領域の振動加速度を稼動履歴として記憶するとともに、当該稼動履歴を、回転軸の回転速度が変化した場合のみならず、周波数領域の振動加速度の最大値が所定の閾値を超えた場合にも記憶するため、回転軸の回転速度の変化とびびり振動の発生状況とを関連づけて記憶することができる。したがって、作業者は回転軸の回転速度とびびり振動の発生状況とを関連づけて把握することができ、ひいてはびびり振動の容易且つ効果的な抑制を図ることができる。
(もっと読む)
数値制御装置
【課題】工作機械における駆動関連要素の電力損失または電力効率を算出し表示、印刷出力、記憶媒体への記録出力、または、数値制御装置内部または外部の機器への出力を実施することが可能な数値制御装置を得ること。
【解決手段】モータなどのアクチュエータを駆動させるための電力供給に関係する工作機械6における各駆動関連要素、および工作機械6に電力を供給する電源装置12のうちの少なくとも2つ装置の出力電力または出力エネルギーを計算または推定する電力算出部3と、前記電力算出部3から出力された出力電力または出力エネルギーから電力損失または電力効率を算出する損失/効率算出部4と、前記損失/効率算出部4にて算出された電力損失または電力効率を表示、印刷出力、記憶媒体への記録出力、または他の機器への出力を実施する電力出力部5とを備える。
(もっと読む)
振動抑制装置
【課題】現在の閾値がどのような値として設定されているかを作業者が容易に把握することができる振動抑制装置を提供する。
【解決手段】実加工前の最大加速度に基づいて閾値を新たに変更設定するとともに、元の閾値や変更後の閾値をフーリエ解析の解析結果に関連づけて表示装置に表示するようにした。したがって、作業者は実加工時に閾値がどのように設定されているかを容易に把握することができる。また、「びびり振動」の発生を示す最大加速度が検出されたにも拘わらず、閾値が高く変更設定されすぎて検出できないような事態を容易に見つけ出すことができる。
(もっと読む)
ロボットの教示再生装置および教示再生方法
【課題】過大力とタクトタイム増加を防ぎ、力制御に関する知識のない教示者でも直感的な操作で簡単に嵌合などの接触作業を成功率高く教示・再生できるようにする。
【解決手段】教示ペンダントに力制御設定手段と力制御手動操作手段と力制御状態表示手段と作業状態保存手段を備え、力制御設定手段は座標系の各軸方向それぞれに対する操作モード選択手段を備え、テスト運転で動作プログラムを再生している最中に、力制御手動操作手段は操作モードにしたがって位置または力指令を動作プログラムの動作に重畳して増減し動作を修正する。この重畳された修正動作によりロボット作業を適切な力加減により、オペレータの判断で作業を成功に導く。この時のデータをロボットの修正された動作プログラムデータとして再度登録し直す。再登録された動作プログラムはオペレータが適切に誘導したデータであるため成功確率が高いティーチングデータとなる。
(もっと読む)
ロボットのツールベクトルの導出方法及び較正方法
【課題】簡便に短時間にしかも精度よくロボットのツールパラメータ(Tx,Ty,Tz,α,β,γ)、特にツールパラメータの中の並進成分(Tx,Ty,Tz)であるツールベクトルを導出する方法を提供する。
【解決手段】本発明に係るロボットのツールベクトルの導出方法は、ロボット2のアーム先端に取り付けられたツール6の先端位置を決定するツールベクトルを導出する方法であって、ロボット2のツール6の先端が空間上の所定点の近傍に位置するように、ロボット2に対して3つ以上の姿勢をとらせ、各姿勢におけるツール6の先端の位置ずれ量である実績位置ずれ量を計測し、計測された実績位置ずれ量を基にツールベクトルTを算出する。
(もっと読む)
NC工作機械
【課題】
機械操作者の操作入力作業を簡略化すべく、機械操作者の使用方法に合わせた画面表示を設定することができるNC工作機械を提供する。
【解決手段】
機械操作者からの入力データを入力する入力データ処理部と、前記機械操作者の使用方法を予め分類し記憶する使用方法分類記憶部と、前記機械操作者の入力データに応じて前記使用方法分類記憶部に記憶された何れの使用方法であるかを判断する分類判断部と、前記使用方法の分類内容に応じて、前記機械操作者に対して操作入力を促す表示画面の表示項目のうち、入力不要項目はマスクするように予め設定された表示切替内容記憶部と、前記分類判断部の判断内容に応じて、前記表示切替内容記憶部から表示すべき表示項目を特定し、前記機械操作者の入力データに応じた表示画面となるように画面切替を行う表示切替部と、を備えた。
(もっと読む)
工作機械の運転機能制御装置
【課題】工作機械を運転する際の省エネルギーおよび安全の向上に貢献するものであり、使用者が、エネルギーおよび安全に関して最適化されるように単純な方法で異なる運転モードでの工作機械の運転を計画することができる装置を提供する。
【解決手段】主電源をスイッチオンまたはスイッチオフする装置2と、選択可能な基準に従って工作機械の運転機能のスイッチオフ時間を決定する少なくとも1つの装置3とからなる工作機械の運転機能制御装置を提供する。
(もっと読む)
工作機械の制御装置
【課題】象限突起補正等に関するNCパラメータの調整を容易に行うことができる工作機械の制御装置を提供する。
【解決手段】複数のNCパラメータの調整レベルをそれぞれスライド式又はロータリ式の調整手段3で変えることができる入力部と、NCパラメータを変更することによって変化する機械の状態を図形で表した図形データを記憶するとともに、入力部で入力したNCパラメータの調整レベルに対応した図形データを生成する図形データ生成部7と、生成された図形データに基づいて図形を画面に表示する表示部4と、を具備する。
(もっと読む)
ロボット装置用の制御プログラムを試験するための試験装置
本発明は、実際のロボット装置用の、具体的には、複数のロボット制御部(2.1〜2.n)を有する塗装装置用の制御プログラムを試験する試験装置に関連する。それらはそれぞれ制御プログラムを含み、実際のロボット装置におけるロボット制御部(2.1〜2.n)と、制御ユニット(4)が制御プログラムを含み、実際のロボット装置における制御ユニット(4)に相当するロボット制御部(2.1〜2.n)を調節するための少なくとも1つの制御ユニット(4)とに相当し、ロボット制御部(2.1〜2.n)をお互いに接続する、および/または、制御ユニット(4)に接続する第一のデータバス(3)も有し、第一のデータバス(3)は実際のロボット装置におけるデータバスに相当する。試験装置が、第一のデータバス(3)に接続され、かつ、実際のロボット装置の周辺機器部品をシミュレーションするモデリングデバイス(9)をも有し、そのため制御プログラムは周辺機器部品なしで試験され得る。本発明はまた、好適な試験方法をも含む。 (もっと読む)
数値制御装置
【課題】工作機械の消費エネルギを機械由来の機械駆動エネルギと加工由来の加工エネルギとにより評価可能とした数値制御装置を得ること。
【解決手段】電力消費要素を駆動して被加工物4を加工する工作機械2を数値制御するための数値制御装置1であって、工作機械2の稼動による消費エネルギを計算するエネルギ計算部12を有し、エネルギ計算部12は、電力消費要素の駆動に伴って消費される機械消費エネルギを消費エネルギの総量から差し引くことにより、被加工物4への加工に伴って消費された加工エネルギとして算出する。
(もっと読む)
切削工具の作動条件を最適化する方法
本発明は、COM法を適用して、機械加工作業の最適化パラメータを取得する方法であって、切削作業を表す少なくとも1つの変数の、テストごとに異なる付与された値で実施される複数のテストの際に、比切削エネルギーKcを表す同じである複数の読取を提供することを含み、変数の1つは切削速度Vcであり、別の1つは進行度fであり、この方法は次に、機械加工作業を実施するために結果を処理することによって得られた変数の最適値を含む、変数の各々の値の範囲を判断することを含む方法において、デジタル制御装置7の特定のプログラム10aは、テストのための1回の機械加工工程の際に変数の値を連続的に変動させるために使用され、読取データが、1回の工程の際に機械ピンのモーターのトルク電流Iqの様々な値によって形成され、これら値から、計算処理によってKcに対応する値が導出されることを特徴とする、方法に関する。  (もっと読む)
(もっと読む)
ペンダント
【課題】操作者の入力操作を受け付けるための入力受付画面を複数の単位画面に分割して表示する場合において、一連の入力操作を行う際に表示画面の切り替え操作を頻繁に行うことを抑制することができるペンダントを提供する。
【解決手段】制御部41は、機能設定入力部42が操作を受け付けた際に表示部12に表示されている単位画面を操作履歴画面として記憶部45に順次記憶させ、今回記憶した単位画面と前回記憶した単位画面とを順不同に組み合わせたものを特定画面パターンとして記憶部45に記憶させる。制御部41は、同じ単位画面の組み合わせの特定画面パターンが2つ以上記憶されている場合に、単位画面の相互間で画面表示の切り替えを可能とするリンクボタンを生成可能とする。
(もっと読む)
ロボットの教示装置、及びロボットの制御装置
【課題】部品の種別毎に必要であったロボットの動作範囲や力覚センサ出力の許容範囲に関する作業者の初期設定作業を省略することができ、作業者による教示作業の負担を軽減させることができるロボットの教示装置、及びロボットの制御装置を提供する。
【解決手段】経路教示系127は、被組付ワーク150への組み付けが完了した状態の組付ワーク140をロボットハンド102に把持させ、組付ワーク140に過大な力が作用しないロボットハンド102の位置姿勢を探索しながら、ロボットハンド102に組付ワーク140の引抜動作を実行させる。経路教示系127は、その引抜動作の際に、ロボットハンド102の引抜移動経路を取得する。経路教示系127は、取得した引抜移動経路を時系列逆順に辿る経路を、組付作業経路として生成し、その生成した組付作業経路を動作制御部121に教示する。
(もっと読む)
21 - 40 / 80
[ Back to top ]