
Fターム[3D232EB02]の内容
走行状態に応じる操向制御 (73,124) | 制御対象(制御量) (5,762) | 操舵方向、位相 (137) | 特性のモード切替 (33)
Fターム[3D232EB02]に分類される特許
1 - 20 / 33
自動車
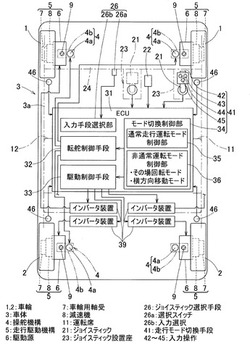
【課題】 その場回転または横方向移動等の非通常走行形態で走行できる自動車において、非通常走行形態と通常走行形態の間での走行形態の切り換えが、運転者が意図した状態で行えて、不測に切り換わることがないようにする。
【解決手段】 3輪以上の車輪1,2を有し、全車輪1,2に独立して転舵可能な転舵機構4を有し、各車輪1,2のうちの駆動輪は、各々独立して原動機6を含む走行駆動機構5により走行駆動される。これにより、その場回転や横方向移動となる非通常走行の運転を可能となる。この前提構成の自動車において、通常走行運転モードと非通常走行運転モードとの切換を、運転者の操作によって切り換える走行モード切換手段41を設ける。
(もっと読む)
四輪操舵制御装置

【課題】パワーステアリング装置が故障する場合に備えて、四輪操舵装置の後輪の転舵機能を利用して、車両の転舵ができる四輪操舵制御装置を提供する。
【解決手段】操舵部材2の操作に基づく操舵トルクを検出するトルクセンサ10と、操舵角を検出する操舵角センサ4と、トルクセンサ10の検出値に基づいて前輪を転舵するための補助力を得る操舵補助制御部31と、操舵角センサ4若しくはトルクセンサ10の検出値に基づいて後輪を転舵制御する転舵制御部41とを備え、転舵制御部41は、操舵補助制御部31の機能に故障があると判定された場合に、後輪を逆相側でのみ転舵制御する。
(もっと読む)
操舵装置
【課題】簡易且つ適切に旋回モードを移行させる。
【解決手段】操舵装置において、転舵機構は、前二輪および後二輪を有する車両10における前二輪および後二輪の各々をステアリング32の操舵に基づいて転舵する。駆動機構は、前二輪および後二輪の各々を個別に駆動する。転舵機構および駆動機構は、ステアリング32の操舵量が増加する過程において、前二輪を同位相に転舵する通常旋回モードから、前二輪を同位相に転舵するとともに後二輪の旋回外輪に前進方向の駆動力を与え後二輪の旋回内輪に後進方向への駆動力を与える小回り旋回モードを介して、後二輪を逆位相に転舵する信地旋回モードに移行させる。転舵機構は、信地旋回モードにおいて、前二輪の旋回内輪を直進方向に戻すよう転舵する。駆動機構は、信地旋回モードにおいて、前二輪の旋回内輪に後進方向の駆動力を与える。
(もっと読む)
制御装置、リーチ式フォークリフトおよびプログラム
【課題】運転者に違和感を与えたり危険を及ぼしたりする可能性のある状態であることを、事前に運転者へ通知できるようにする。
【解決手段】操舵モードをロックモードへと切り替えるための操作が運転者により行われた際(s120「YES」)、操舵輪53の操舵角がロック角以上になっていると、切替条件が満たされていないとしてロックモードへの切替を保留するとともに(s130「NO」)、切替条件が満たされていないことを通知することができる(s140)。
(もっと読む)
車両の操舵装置および操舵方法
【課題】前後どちらの転舵系が故障しても、操舵応答に大きく寄与する前輪の転舵を補償することにより、操舵応答が大きく悪化するのを回避し得るようになす。
【解決手段】A側車輪3の操舵アクチュエータ27を含む転舵機構と、B側車輪4の操舵アクチュエータ28を含む転舵機構との間を、所要に応じ機械的に結合可能なクラッチ41を設ける。A側車輪転舵系およびB側車輪転舵系が共に正常である場合、コントローラ12はクラッチ41を解放すると共に、操舵角θおよび車体速Vを基に演算した目標挙動が達成されるよう、A側操舵アクチュエータ27およびB側操舵アクチュエータ28を個々に動作させ、右輪3,4を個別に転舵する。A側車輪転舵系またはB側車輪転舵系が故障した場合、コントローラ12はクラッチ41を締結する。この締結により、故障していない正常な転舵系の側操舵アクチュエータ27または28を用いて、故障している側の車輪を引き続き転舵することができ、前輪の転舵を補償して操舵応答の大きな悪化を回避することができる。
(もっと読む)
サーボ制御装置
【課題】サーボ制御における積分項を外乱の状況に応じて適正に設定し、オーバーシュートを低減しつつ外乱の影響を補償する。
【解決手段】曲率制御部42から出力される旋回のフィードフォワード制御の操舵トルクと、横位置制御部43から出力される車両の横位置制御の操舵トルクと、姿勢制御部44から出力される車両の鉛直軸回りの姿勢制御の操舵トルクと、積分制御部45から出力される横位置制御の偏差を補償する操舵トルクとを合算した目標操舵トルクを操舵系に与えて操舵支援を行う。その際、外乱変化に対する適切なタイミングで積分値をリセットし、また、外乱の大きさに応じた適切な積分量、積分範囲の制限等を行うことで、オーバーシュートを低減しつつ外乱の影響を補償する。
(もっと読む)
モータ制御装置
【課題】 演算負荷を高めずに精度良く誘起電圧を計算して電気角を推定する。
【解決手段】 簡易誘起電圧演算部111は、モータ20のインダクタンスLによる電圧成分(L・dI/dt)を含めない簡易誘起電圧e’を計算する。補正ゲイン設定部113は、補正ゲインマップを参照して、q軸指令電流Iq*が大きくなるほど小さくなる補正ゲインKLを設定する。誘起電圧補正部114は、簡易誘起電圧e’に補正ゲインKLを乗算して誘起電圧eを求める。これにより、微分演算処理を行わずに精度良く誘起電圧を計算することができる。
(もっと読む)
作業車両
【課題】作業車両において、作業機を昇降させることのできるフィンガーレバーを利用した左右操舵装置、及びウインカ点滅を可能にする。
【解決手段】ステアリングハンドルの近傍に一回の操作で作業機を昇降させることのできるフィンガーレバー、該フィンガーレバーの昇降操作検出用のフィンガーレバー上げ用スイッチ、フィンガーレバー下げ用スイッチ、及び、チエックヒューズを設け、旋回切れ角センサの故障時には前記チエックヒューズを取り外すと緊急操舵モードに移行し、前記フィンガーレバーの昇降操作に基づく前記フィンガーレバー上げ用スイッチ、フィンガーレバー下げ用スイッチの検出信号により、前記旋回切れ角センサの検出値を無視して前記旋回駆動手段、前記操舵装置を作動させて左右操舵するコントローラを設けたことを特徴とする作業車両とする。
(もっと読む)
パワーステアリング機構
【課題】エンジンに直結された油圧ポンプにおける無駄な動力を削減することが出来て、車両の既存部品を生かして後付けが可能なパワーステアリング機構の提供。
【解決手段】油圧ポンプの吐出口(2o)と吸入口(2i)とを連通するバイパスライン(Lb)を有し、該バイパスライン(Lb)には流量調整弁(16)が介装されており、該流量調整弁(16)には制御装置(20)から開閉制御信号が入力され、制御装置(20)は、操舵角度センサ(18)が計測したステアリングの操作量と、操舵力センサ(19)で計測したパワーシリンダ(3)或いはナックルアーム(11)に作用する力とに基づいて、前記流量調整弁(16)を開閉制御する機能を有している。
(もっと読む)
車両用操舵装置
【課題】切り込み時および切り戻し時の両方の操舵フィーリングをともに良好にするとともに、操舵状態が変化する際のアシスト電流の発振を防止して操舵フィーリングを良好に保つことができる車両用操舵装置を得る。
【解決手段】アシスト電流指令値演算部28は、操舵状態判定部27が操舵状態を切り込み状態と判定した場合に、切り込み時電流指令値をアシスト電流指令値として出力し、操舵状態判定部27が操舵状態を切り戻し状態と判定した場合に、切り戻し時電流指令値をアシスト電流指令値として出力し、操舵状態判定部27が操舵状態を切り返し状態と判定した場合に、切り込み時電流指令値および切り戻し時電流指令値に基づいて、アシスト電流指令値を演算する。
(もっと読む)
車線逸脱警報装置
【課題】車両が車線を逸脱すると予測された場合に、運転者がすぐに回避行動を取ることができる車線逸脱警報装置を提供する。
【解決手段】車両(V)の走行車線からの逸脱が予測された場合(ステップS1)、一時的に後輪トー角を前輪と逆相に制御して逸脱方向のヨーモーメントが発生させるとともに、サスペンションを制御してロール感を強調する(ステップS2〜S4)。このため、車両運転者は、強い注意を喚起されてすばやく回避動作を取ることができる。
(もっと読む)
電動パワーステアリング装置
【課題】 3相モータの1相が通電不良となり2相通電駆動する場合に、エネルギーロスおよびトルク変動を抑えつつモータを良好に回転させる。
【解決手段】 2相通電指令部107は、電動モータ20への通電不良が1相だけ発生しているときに、通電不良が発生していない2相を使って電気角θeの変化に対して変動しない操舵アシストトルクを発生するための理論上の2相通電用電流演算式と、電動モータ20の上限電流を規定する最大電流と、2相通電用電流演算式における電気角θeを進める進角量θaとに基づいて、2相通電用の指令電流を演算する。進角量設定部110は、指令電流の通電方向が反転する直前位置における電動モータ20の運動エネルギーに応じて進角量θaを設定する。
(もっと読む)
電動パワーステアリング装置
【課題】非線形な電流−トルク特性を有するシンクロナスリラクタンスモータを用いて簡単な演算処理でトルク制御を行うことができる電動パワーステアリング装置を提供する。
【解決手段】EPS制御部41からモータ制御部51へ目標トルクを送信する。モータ制御部51は、入力された目標トルクから目標電流実効値Iと目標電流位相θを算出する。ここで算出する目標電流実効値Iと目標電流位相θは、最大トルク(最小の電流実効値で出せる最大のトルク)を出せるように算出するか、最大出力(最小の電流実効値で出せる最大の出力)を出せるように算出するかの切り換えを、3相インバータで構成されるPWM変換部57の出力のデューティ比を用いて行う。次に、3相2軸変換部53が、目標電流実効値Iと目標電流位相θから目標q軸電流Iqと目標d軸電流Idを算出し、PWM変換部57によってデューティ制御を行ってモータ58のトルク制御を行う。
(もっと読む)
運転支援装置
【課題】車線変更確率の精度向上が図られ、車線変更確率に応じて運転支援を実行することが可能な運転支援装置を提供すること。
【解決手段】運転者の加減速操作に関する運転特徴を示す第1の学習値に基づいて車線変更確率を算出する。運転者の操舵操作に関する運転特徴を示す第2の学習値と、自車両周辺環境および/または運転者情報とに基づいて車線変更確率を補正する。これらにより、精度良く車線変更確率を求めることができ、運転者の意思による車線変更と、運転者の意思によらない車線逸脱との判別の精度向上を図ることが可能となる。また、車線変更確率に応じて運転支援を制御する運転支援手段を備える構成とし、補正されて精度が向上された車線変更確率に応じて、好適に運転支援を実行する。
(もっと読む)
後輪操舵制御装置
【課題】 起動時等に故障誤検知をしたり、違和感を伴なう動作を行うことのないように改良された後輪操舵制御装置を提供する。
【解決手段】 アクチュエータの温度が所定値以下のときには、前記アクチュエータの駆動状態を抑制することにより、左右後輪のアクチュエータの応答に差異が生じたり、遅れが生じるのを防止し、しかも誤った故障診断を行うことを回避することができる。
(もっと読む)
電動パワーステアリング装置
【課題】通電不良の発生に伴う二相駆動時のモータ回転を円滑化して、安定的にアシスト力を付与することのできる電動パワーステアリング装置を提供すること。
【解決手段】二相駆動時における相電流フィードバック制御の基礎となる回転角θを補正する回転角補正制御部40は、操舵トルクτに基づいて、ステアリング操作の方向に位相をずらすべく回転角θを補正するような第2補正量ε2を演算する。そして、当該第2補正量ε2の加算による回転角補正を実行する。また、回転角補正制御部40は、操舵系においてそのステアリング操作に対して逆向きに作用する反力トルク(の絶対値)の大きさを推定する推定手段としての機能を有し、当該推定される反力トルクの大きさに応じて変化する反力トルクゲインKrfを演算する。そして、この反力トルクゲインKrfによって第2補正量ε2を補正することにより、その回転角θの補正量を変化させる。
(もっと読む)
操舵制御装置
【課題】運転者が意図した通りの車両姿勢で平行移動を実現させる操舵制御装置を提供すること。
【解決手段】前後輪を同位相にする平行移動モードを含む複数の操舵モードを切り替えながら実行する操舵制御装置100は、車両姿勢を検出する車両姿勢検出手段10と、平行移動モードにおける目標車両姿勢を決定する目標車両姿勢決定手段11と、車両姿勢検出手段10が検出した車両姿勢と目標車両姿勢とに基づいて前輪及び後輪のうちの少なくとも一方を転舵させ車両姿勢を修正する車両姿勢修正手段12と、を備える。
(もっと読む)
操舵制御装置
【課題】車両走行中で且つ操舵中である状況下でのモード切替を可能としつつ、車両走行中で且つ操舵中である状況下でのモード切替に起因した車両挙動の急変を適切に防止すること。
【解決手段】本発明による操舵制御装置は、転舵手段の転舵モードを切り替える転舵モード切替手段と、前記転舵モード切替手段により転舵手段の転舵モードが前輪転舵モードから前後輪同相転舵モードに切り替えられた場合に、車両走行中で且つ操舵中である状況下でモード遷移中の転舵角制御を行うモード遷移時制御手段とを備え、前記モード遷移時制御手段は、後輪の転舵角の変化量を、前輪転舵角と後輪転舵角との比に基づいて設定する。
(もっと読む)
操舵システム
【課題】後輪のトー角を変更するトー角変更装置が失陥した場合、ダンピングの特性が変わってしまうことで車両の挙動が不安定になることがある。
【解決手段】トー角変更装置120が正常の場合に参照するダンパテーブルN52a1と、トー角変更装置120がトーイン失陥した場合に参照するダンパテーブルA52a2およびトーアウト失陥した場合に参照するダンパテーブルB52a3とを備える。そして、トー角変更装置120が正常の場合は、ダンパテーブルN52a1を参照してダンピングの補償値Iを設定し、トー角変更装置120がトーイン失陥した場合は、ダンパテーブルA52a2を参照して、補償値Iを設定し、トー角変更装置120がトーアウト失陥した場合は、ダンパテーブルB52a3を参照して、補償値Iを設定する。
(もっと読む)
電動パワーステアリング装置
【課題】電動パワーステアリング装置において、低騒音であり、且つエンジン始動後の操舵開始のときの操舵フィーリングを向上すること。
【解決手段】イグニッションスイッチ20がオンされたときに、所定の低温条件(例えば−10°C以下)にあることを条件として、電動モータ14を駆動し、操舵部材2の所定の操作角範囲(例えば左右少なくとも30°)に対応する動作範囲で、ステアリング機構9に、複数回の往復運動による暖機動作をさせる。ギヤハウジング18内の潤滑剤を攪拌する。
(もっと読む)
1 - 20 / 33
[ Back to top ]