
Fターム[3D233CA21]の内容
パワーステアリング装置 (30,926) | 電気式パワーステアリング (28,865) | 制御、制御対象 (3,368)
Fターム[3D233CA21]の下位に属するFターム
減速機 (293)
駆動力取出し機構(クラッチ) (106)
操舵の中立位置制御 (92)
Fターム[3D233CA21]に分類される特許
61 - 80 / 2,877
電動パワーステアリング装置
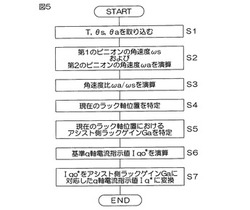
【課題】電動モータのトルクが伝達されるラックが可変比ラックである電動パワーステアリング装置において、操舵状況に応じた適切な操舵補助を実現できる電動パワーステアリング装置を提供する。
【解決手段】q軸電流指示値生成部は、現在のラック軸位置におけるアシスト側ラックゲインGaを求める。次に、q軸電流指示値生成部は、操舵トルクとアシスト側ラックゲインGaがラックゲイン基準値Gaoである場合のq軸電流指示値(基準q軸電流指示値Iqo*)との関係を記憶したマップを用いて、操舵トルクTに応じた基準q軸電流指示値Iqo*を求める。次に、q軸電流指示値生成部は、基準q軸電流指示値Iqo*を、アシスト側ラックゲインGaに対応したq軸電流指示値Iq*に変換する。
(もっと読む)
ウォーム減速機

【課題】負荷がかかった状態でも常に潤滑油のくさび効果を確保できるウォーム減速機を提供する。
【解決手段】ウォームホイール40の歯面41が第1形状部61と残りの部分である第2形状部62とを含む。第1形状部61は、使用時の最大負荷と同等または同等以上の負荷のときのウォームホイール40に対するウォームの位置ずれに起因してウォームの歯面が可動する可動範囲の包絡線を含んで構成される。第2形状部62は第1形状部61の少なくとも溝底51側に隣接しウォームとの接触を回避する。通常負荷の状態で第1歯面形状部61の中央部を含む領域A0のみがウォームと接触する。第1歯面形状部61の歯幅方向W1の一対の端部611,612には非接触領域A1,A2が形成される。
(もっと読む)
電動パワーステアリング装置及びその製造方法
【課題】簡単な構造で支持剛性の高い小型の電動パワーステアリング装置を提供する。
【解決手段】ピニオン軸7が、トーションバー19を介して連結された入力軸17と出力軸18とを含む。駆動ギヤ23から被動ギヤ24を介して出力軸18に動力を伝達する。第1ハウジング30が、駆動ギヤ23の一端を支持する第1軸受37を保持した第1軸受孔38と、入力軸17を支持する第2軸受39を保持した第2軸受孔40と、トルクセンサ収容部41とを含む。第2ハウジング20が、駆動ギヤ23の他端を支持する第3軸受42を保持した第3軸受孔43と、被動ギヤ24のボス部54を片持ち支持する第4軸受44を保持しトルクセンサ収容部41より大径の第4軸受孔45とを含む。
(もっと読む)
車両用姿勢制御装置
【課題】ペダルの踏み込み量、ハンドル操舵量などを考慮して車両の姿勢制御を行うことにより、ドライバの意図するとおりの旋回走行をアシストすることができる車両用姿勢制御装置を提供する。
【解決手段】操舵角δと車速vとに基づいて、車両旋回時の目標横すべり角βsを算出する目標横すべり角演算部151と、操舵角速度δ′、アクセルペダルの踏み込み量A、アクセルペダルの踏み込み速度A′、フットブレーキペダルの踏み込み量Bの中から選択される少なくとも1つに対応して算出される横すべり角補正量Δβを用いて、前記目標横すべり角演算部151によって算出された目標横すべり角βsを補正する目標横すべり角補正部152と、前記目標横すべり角補正部152によって補正された目標横すべり角β*を用いて車両の姿勢制御を行う。
(もっと読む)
モータ制御装置および電動パワーステアリング装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置を提供する。
【解決手段】d軸電流指令値設定部31、d軸電流偏差演算部32、ロータ角度制御部33、ロータ角度演算部34および速度演算部35から構成されるロータ角度推定手段によって、ロータ角度θが推定される。q軸電流指令値設定部21は、トルクセンサ1によって検出される操舵トルクおよび車速センサ2によって検出される車速に応じたモータトルクをモータ5から発生させるためのq軸電流指令値Iq*を設定する。d軸電流指令値設定部24は、d軸電流指令値Id*を設定する。q軸電流指令値Iq*と、d軸電流指令値Id*と、q軸電流検出値Iqと、d軸電流検出値Idと、推定されたロータ角度θとに基づいて、モータ5に供給される電流が制御される。
(もっと読む)
ステアリング装置
【課題】エアバッグを備えた車両のステアリング装置において優れた衝撃吸収性を発揮すること。
【解決手段】ステアリング装置1が、筒状のステアリングコラム17を軸方向X1に伸縮させて操舵部材2の位置を調整するテレスコピック機構Dを備える。ステアリングECUが、車両が衝突を予知したときにステアリングコラム17を最伸長位置に伸ばす。エアバッグ袋体33が膨張した後、シートベルトSBを装着している運転者HBが前方へ移動してくるときに、衝撃吸収機構Bの衝撃吸収ストローク量ST1に加えて、テレスコピック最大ストローク量ST2を衝撃吸収に寄与させる。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】電動モータの抵抗の推定精度が低下することを抑制することのできる電動パワーステアリング装置の制御装置を提供する。
【解決手段】電動パワーステアリング装置の電子制御装置30は、測定電流Imaおよび測定電圧Vmaを用いて第1抵抗値Raを算出する第1抵抗算出部61と、この第1抵抗算出部61とは異なる手段により第2抵抗値Rbを算出する第2抵抗算出部62とを有する。そして第2抵抗値Rbよりも小さい第1抵抗値Raを演算抵抗値として確定する。
(もっと読む)
操舵支援装置
【課題】車線の逸脱を防止するためにガイダンストルク指令値を増加補正することができ、しかもガイダンストルク指令値が不必要に増加補正されるのを抑制できる操舵支援装置を提供する。
【解決手段】ゲイン設定部51は、TLC演算部41によって演算された車線逸脱予想時間TLCに基づいて、ガイダンストルク指令値補正用のゲインGを演算する。車線逸脱予想時間TLCが所定値C未満の領域においては、ゲインGは、車線逸脱予想時間TLCの減少に応じて下限値(=1)から上限値Gmax(>1)まで単調に増加するように設定されている。ゲイン乗算部52は、ガイダンストルク指令値補正用のゲインGをガイダンストルク指令値TG*に乗じることにより、最終的なガイダンストルク指令値TG*’を求める。
(もっと読む)
電動パワーステアリング用電動機及び電動パワーステアリング装置
【課題】希土類磁石成分を低減し、モータの製造コストを低減できる電動パワーステアリング用電動機及び電動パワーステアリング装置を提供する。
【解決手段】電動パワーステアリング用電動機は、ロータヨーク及びロータヨークの外周にロータヨーク内で閉磁路ができるように埋め込まれ、磁束密度が1.2T以上かつ保磁力が1400kA/m以下である複数の平板状のマグネットを含むロータと、ロータヨークの外側に所定の間隔を有して環状に配置されるステータコア及びステータコアを励磁しロータにリラクタンストルク及びマグネットトルクを生じさせる励磁コイルを含むステータと、を含む。
(もっと読む)
電動パワーステアリング装置
【課題】ステアリングホイールの操舵をアシストする通常制御時に、電源リレーのショート故障を診断することの可能な電動パワーステアリング装置を提供する。
【解決手段】電源からインバータ回路を経由してモータに電力を供給する配線に設けられた電源リレーは、異常時に電源からインバータ回路への通電を遮断する。マイコンは、ステアリングホイールの操舵をアシストする通常制御時に、ステアリングホイールが操舵されていないとき(S4:NO)、電源リレーのショート故障を診断する。EPSは、ステアリングホイールの操舵がされていない時に電源リレーにより通電を遮断することで(S5)、ステアリングホイールの操舵のアシストに影響を与えることなく、電源リレーのショート故障を診断することができる。
(もっと読む)
操舵支援装置
【課題】車両がカントのある路面を走行している場合に、路面の低い側に車両を換向させるガイダンストルクが与えられたときに、操舵角速度および操舵角変化量が過度に大きくなるのを抑制することができる操舵支援装置を提供する。
【解決手段】操舵角速度閾値設定部52は、ガイダンストルク指令値TG*と車速Vとに基づいて、操舵角速度閾値Vhthを設定する。速度偏差演算部52は、操舵角速度演算部51によって演算された操舵角速度の絶対値|Vh|と操舵角速度閾値Vhthとの偏差ΔVhを演算する。ゲイン設定部54は、速度偏差ΔVhhに基づいて、ゲインGを演算する。ゲイン乗算部55は、ゲインGをガイダンストルク指令値TG*に乗じることにより、最終的なガイダンストルク指令値TG*を求める。
(もっと読む)
電動パワーステアリング装置
【課題】簡素な構成にて効果的に車両の偏向が抑えられ、快適な操舵フィーリングを得ることができる電動パワーステアリング装置を提供することにある。
【解決手段】トルクセンサから検出された操舵トルクτの形状を生成する操舵トルク波形形状補正手段(32)によって、操舵トルクτの波形形状を運転状態に最適な波形形状の補正操舵トルクTcに補正する。そして、その補正操舵トルクTcと、操舵トルクτの乗算により算出されたリードプル補正量Iip*の値により、アシスト力を増減する。
(もっと読む)
電動機、電動機制御装置及び電動パワーステアリング装置
【課題】製造コストを低減できる電動機、電動機制御装置及び電動パワーステアリング装置を提供する。
【解決手段】電動機は、ロータヨークと、ロータヨークの外側にギャップを有して環状に配置されるステータコアと、低保磁力部と低保磁力部よりも保磁力が高い高保磁力部とを含み、低保磁力部が高保磁力部よりもギャップ側となるようにロータヨークに埋め込まれるマグネットと、ステータコアを励磁し、かつ低保磁力部の磁束量を変化させるための磁界を発生させる励磁コイルと、を含む。
(もっと読む)
車両用操舵装置
【課題】電動パワーステアリング装置の異常によるアシスト停止後もステアリング操作により車両の旋回を継続できる車両用操舵装置を提供する。
【解決手段】ABS装置30は、電動パワーステアリング装置1のECU11の制御状態量である操舵トルクτを取得する(ステップS401)。異常検出信号Spsfの入力があるか否かを判定し(ステップS402)、異常検出信号Spsfの入力がある場合(ステップS402:YES)には、続いてステアリング操作中であるか否かを判定する(ステップS403)。ステアリング操作中であると判定した場合(ステップS403:YES)には、受信した操舵トルクτに基づき、所定の転舵輪7に付与する制動力を演算する(ステップS404)。ここで、通常時の制動力に演算された制動力分が補正される。そして、その制動力を制御指令として出力(ステップS405)し、ブレーキアクチュエータ31を制御する。
(もっと読む)
走行制御装置および車両
【課題】車両の進行先の影響を考慮しつつ、運転者に安心感を与えながら物体の衝突回避を行うことができる走行制御装置および車両を提供すること。
【解決手段】車両1の進路方向における仮想バンパー領域71を広く設定する。これにより、車両1の進行先にある物体80との衝突回避を確実に行うことができる。一方、車両1の進行方向とは異なる方向においては、仮想バンパー領域71が車両1の進行方向と比して相対的に狭く設定されるので、車両1の進行方向とは関係のない場所にある物体との衝突回避動作を抑制できる。よって、車両1の進行先の影響を考慮しつつ、運転者に安心感を与えながら物体80の衝突回避を行うことができる。
(もっと読む)
車両用走行制御装置
【課題】車線追従制御中、運転者が車線中央寄りに向かうことを目的として操舵操作の介入を行った場合に、運転者の操舵操作の負担を軽減することができる車両用走行制御装置を提供する。
【解決手段】車線追従制御手段(目標横位置設定部)は、運転者の車線中央lmへの復帰意図があると判定されると目標横位置Y*を車線中央lmに設定し、車線中央復帰意図判定手段(車線中央復帰意図判定部)は、運転者の操舵方向が車線の外側から中央lm側へ向かう方向であり、かつ、検出される操舵状態量(操舵トルクT)が第1の閾値よりも大きい第2の閾値(閾値T2)を越えたとき、または、検出される車両運動状態量(ヨーレートψ'、車速V)から推定される自車両MCの予想軌跡Sにおける所定の前方到達点(予想到達点)SPが車線中央lmを越えたとき、運転者の車線中央lmへの復帰意図があると判定する。
(もっと読む)
ステアバイワイヤ式操舵機構の制御装置
【課題】 車両運動モデルを導入した複雑な制御系を構築することなく、路面左右の摩擦係数の違いや横風等に対する外乱安定化制御を簡単に実現する。
【解決手段】 舵角指令の主な値となるフィードフォワード値を生成するフィードフォワード値生成手段21と、外乱補正用のフィードバックによる補正量を生成する外乱補正量生成手段22と、前記フィードフォワード値と補正量とを加算して前記転舵モータ15を駆動する舵角指令を生成する比較手段23とを有する。外乱補正量生成手段22は、車両速度とハンドル角から、車両20に生じる横加速度を演算し、外乱検出手段25による横加速度の実測値が目標値に追従するように前記補正量を演算する。
(もっと読む)
電動パワーステアリング装置
【課題】製造工数を削減することができ、しかも組み立てが容易な電動パワーステアリング装置を提供する。
【解決手段】この電動パワーステアリング装置は、車両のラック軸11が内部に挿通されてモータの駆動に基づき回転する筒状のモータ軸21と、係合部43を介してモータ軸21に連結されるボールねじナット40とを備える。そして、モータの駆動力をモータ軸21及びボールねじナット40を介してラック軸11に伝達することにより、車両の操舵系の操作を補助するアシスト力をラック軸11に付与する。ここでは、ボールねじナット40の外周面に段差部45を形成する。また、ボールねじナット40がモータ軸21に対して矢印a2で示す方向に相対移動可能な距離が「C+D」に規制されるように、第3ハウジング3cの端部3dをボールベアリング51に対向配置する。また、ボールねじナット40の係合部43の長さSを「C+D」よりも長く設定する。
(もっと読む)
制御装置及びこれの製造方法並びに車両用操舵装置
【課題】超音波ワイヤーボンディングを良好に行うことができる制御装置を提供する。
【解決手段】ECU12が、第2ハウジング30の基板載置部47に載置されたパワー基板48と、電子部品および端子板58を保持した樹脂部材59とを備える。端子板58が、樹脂部材59に保持された第1板部75と、第1板部75の端部75aから延設されて樹脂部材59から離隔した弾性変形可能な第2板部76とを含む。仮に、パワー基板48に反り等が生じていても、超音波ワイヤーボンディング工程において、ワイヤーボンディングツール81がボンディングワイヤ74を第2板部76の表面76aに押圧したときに、第2板部76が、パワー基板48の反りに応じて弾性変形する。
(もっと読む)
ステアバイワイヤ装置
【課題】コンパクトで乗員のハンドル操作が違和感なく行われると共に故障時には的確に対応可能なステアバイワイヤ装置を提供する。
【解決手段】ステアリング11の回転操作によって前輪をフレーム12に対してトー方向に回転させる車両に用いるステアバイワイヤ装置1において、ステアリング11の回転角を取得する回転角取得部材2と、回転角取得部材2の取得した角度に応じて駆動力を発生するアクチュエータ3,4と、アクチュエータ3,4の駆動力を前輪のトー方向の回転へと伝達する連結シャフト5と、を有し、連結シャフト5は、アクチュエータ3,4の出力を前輪のトー方向の回転へと伝達する第1の状態と、ステアリング11の回転力を前輪のトー方向の回転へと伝達する第2の状態と、に移動することを特徴とする。
(もっと読む)
61 - 80 / 2,877
[ Back to top ]