
国際特許分類[B25J17/00]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | 接続部 (479)
国際特許分類[B25J17/00]の下位に属する分類
手首ジョイント (167)
国際特許分類[B25J17/00]に分類される特許
101 - 110 / 312
被塗装物保持ロボットおよび塗装用ロボットシステム
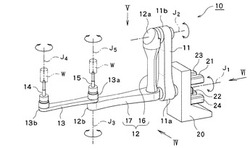
【課題】塗装中に吹き付けの気流が乱れ、ロボット等の装置周辺を余分な塗料で汚染することを防止することが可能な被塗装物保持ロボットおよび塗装用ロボットシステムを提供する。
【解決手段】被塗装物保持ロボット10は、固定されたベース部20と、第1軸J1を中心にベース部20に対して旋回する細長状の第1アーム11とを備えている。L字状の第2アーム12は、第2軸J2を中心に第1アーム11に対して旋回し、細長状の第3アーム13は、第3軸J3を中心に第2アーム12に対して旋回する。また第3アーム13の先端13bに、被塗装物Wを保持する第1保持部14が設けられている。
(もっと読む)
アンギュラ玉軸受、建設機械用走行減速機のスプロケット支持装置及びロボットアームの関節装置

【課題】アンギュラ玉軸受の組立幅内に保持器を収めつつ、玉径を大きくする限界を高める。
【解決手段】肩おとし外輪1と、内輪2と、複数の玉3と、保持器4とを備え、保持器4は、各ポケット41の内面部分42a,43aを形成された環状部42,43を組立幅Tの外輪背面側及び内輪背面側に有し、かつ該組立幅T内に収まるように設けられるアンギュラ玉軸受10において、外輪1の背面12から遠い側の外輪側端部15と内輪背面との間、または内輪2の背面22から遠い側の内輪側端部25と外輪背面との間の少なくとも一方に、周方向の環状配置空間16,26を設けられており、環状部42,43は、対応する側に設けられた環状配置空間16,26内で回転するように、かつ、各ポケット41の内面部分42a,43aと交わるラジアル平面上に位置する部分をもつように軌道輪側方域42b,43bを設ける。
(もっと読む)
回転駆動機構の取付構造
【課題】歯車間のバックラッシの調整を作業者の経験等に依存することなく簡単に行うことができる回転駆動機構の取付構造を提供する。
【解決手段】従動回転機構20の第1歯車21と、回転駆動機構の1種である減速機40の第2歯車41とを噛合させる際のバックラッシを調整する。フレーム50の減速機取付部30に、同一円周上に位置するように等間隔で複数のボルト挿通孔80を形成し、減速機40のケーシング43にボルト挿通孔80と連通するように第2歯車41の回転中心に対して偏心した同一円周上に位置する複数のネジ穴70を形成する。ネジ穴70とボルト挿通孔80とが連通するようにケーシング43の取付位置を変更し、その際に第1歯車21と第2歯車41との間のバックラッシが所望の値となる状態を選び、ボルト挿通孔80を通してネジ穴70にボルト75を螺合し、ケーシング43を取り付ける。
(もっと読む)
減速機構内蔵アクチュエータおよびこれを用いた多関節ロボット
【課題】本発明は、減速機構を組み込んだアクチュエータにおいて軸方向寸法を小さくするとともに、出力軸を中空とする減速機内蔵アクチュエータおよび関節部を小型化したロボットを提供するものである。
【解決手段】フレーム10に固定された環状の固定子鉄心101に電機子コイル102を巻回してなる固定子103と、前記電機子コイル102に通電することで発生する回転磁界または交番磁界の周波数に対して、出力軸速度を減速する減速機構2と、前記減速機構2により減速された出力軸速度をフレーム10に対して回転自在に支持された出力軸5と、回転位置および磁極位置検出手段と、を備え、前記出力軸5の外周に歯数nの歯車を備えるとともに、前記歯車に噛合するように内周に歯数n+aの歯を設けた円板12と、前記円板12の外周にN,S極交互に偶数個の永久磁石11を固着し、前記円板12と空隙を介して対向するように固定子鉄心101が配置されたものである。
(もっと読む)
ロボットハンド装置
【課題】 構造が簡素であり単一のモータで2軸回りに指機構を操作させることができるロボットハンド装置を提供する。
【解決手段】 ロボットハンド装置10は、基部12に固定されたモータ14、モータ14の駆動軸14aに基端部が固定され基部12から延設される基部リンク部材26と先端リンク28からなる指機構16、モータ14の駆動軸14aに設けられた第1軸P1を有する第1プーリ18、先端リンク部材28に設けられた第2軸を有する第2プーリ20、基部12に一端が固定され指機構16の先端リンク部材に他端が固定されると共に第1プーリ18及び第2プーリ20に掛け回されるワイヤ22を備えている。
(もっと読む)
関節機構
【課題】1つの駆動源を動作させることによって2つの自由度を実現することができる関節機構を提供すること。
【解決手段】本発明の関節機構は、少なくとも固定状態となる第1のギア10と、第1のギア10の中心軸方向に第1のギア10と対向して配置され、回転可能とされた第2のギア20と、第2のギア20を回転させる第2のギア用駆動源21と、第1のギア10の中心軸方向と交差する方向に配置された棒状部材50と、棒状部材50とともに棒状部材50を中心軸として回転可能とされ、第1及び第2のギア10,20と噛み合う第3のギア30と、棒状部材50を中心軸として棒状部材50とは独立に回転可能であって、第1及び第2のギア10,20と噛み合う第4のギア40と、を備えていることを特徴とする。
(もっと読む)
ロボット用ハーモニック減速機
【課題】簡単な構成で、振動振幅の低減を図るようにする。
【解決手段】ハーモニック減速機9は、主要構成品としてフレーム3bと、サーキュラスプライン10と、フレクスプライン11と、ウェーブジェネレータ12とを有して構成されている。前記フレーム3bのサーキュラスプライン取付座面3dにおける前記雌ねじ13の開口周縁部に、この雌ねじ13の径寸法より大きさな径寸法の凹部14を設けている。
(もっと読む)
遠隔操作型加工ロボット
【課題】 遠隔操作型アクチュエータを正確な位置に支持することができ、かつ遠隔操作型アクチュエータは細長いパイプ部の先端に設けられた工具の姿勢を遠隔操作で変更することができる遠隔操作型加工ロボットを提供する。
【解決手段】 遠隔操作型アクチュエータ80とその支持装置81とでなる。遠隔操作型アクチュエータ80は、細長形状のスピンドルガイド部3と、このスピンドルガイド部3の先端に先端部材連結部を介して姿勢変更自在に取付けられた先端部材2と、スピンドルガイド部の基端が結合された駆動部ハウジング4aとを備える。先端部材2は、工具1を保持するスピンドルを回転自在に支持する。支持装置81は、ベース部82に対して遠隔操作型アクチュエータ80が1方向の自由度を持つ1自由度機構、または2自由度以上の自由度を持つ多自由度機構からなる。自由度機構を駆動する駆動源84b,87a,89aを設ける。
(もっと読む)
リンク機構
【課題】バネの塑性変形を低減することができるリンク機構の提供にある。
【解決手段】一対のリンクとしてのリンク部材11、12と、該リンクを相対回動可能に連結する回転軸13と、リンクに対して弾性力を付与し2つの腕部14b、14cを有するねじりコイルバネ14と、リンクに設けられ腕部14b、14cと当接するバネ押え15、16とを備えたリンク機構10において、回転軸13の中心軸Pとねじりコイルバネ14の回動中心Qとをずらして設定し、可動側バネ押え16と当接する一方の腕部14cにリンク間のリンク角度βが小さくなるよう回動するときのリンク部材12の回動方向側に曲った変形部14dを形成し、リンクの回転軸13を中心とした回動操作に伴い、変形部14dが形成された腕部14cと可動側バネ押え16との当接位置が変形部14dを通過して腕部14cの先端側に移動可能に配置されている。
(もっと読む)
多自由度ロボット装置
【課題】本発明は、大きいトルクを伝達できるパラレルアーム機構を構成するとともにシリアルアーム機構と組み合わせ、広い可動範囲で高速高精度に重い物を搬送することができる多自由度ロボット装置を提供する。
【解決手段】パラレルアーム機構100と、シリアルアーム機構200を備えた多自由度ロボット装置であって、前記パラレルアーム機構100に備えられた可動プレート2の支持台に前記シリアルアーム機構200が備えられ構成されたものである。
(もっと読む)
101 - 110 / 312
[ Back to top ]