
Fターム[2B043AB15]の内容
農業機械一般(操向) (6,001) | 目的、効果又は機能 (649) | 作業性能向上 (110)
Fターム[2B043AB15]の下位に属するFターム
傾斜地に適用 (8)
湿田又は軟弱路面に適用 (23)
Fターム[2B043AB15]に分類される特許
21 - 40 / 79
コンバイン
【課題】穀稈の状況に応じた適切な進路を把握でき、刈取作業が行いやすくなるコンバインを提供する。
【解決手段】走行部2と、前記走行部2の前方に配置される刈取部3と、前記刈取部3の後方で前記走行部2の前部上に配置される運転部8とを備えるコンバイン1であって、前記運転部の前方を撮影する第一撮影手段12と、前記第一撮影手段12により撮影された映像を表示する表示装置85と、前記運転部8の操向操作手段(ハンドル82)の操作量に基づいて予測進路軌跡Bを作成する制御装置97とを備え、前記制御装置97は、前記予測進路軌跡Bを前記第一撮影手段12により撮影された映像に重畳させ、この予測進路軌跡Bが重畳された映像を前記表示装置85に表示させる。
(もっと読む)
作業車の作業装置昇降構造

【課題】作業車の作業装置昇降構造において、旋回の終了に伴って上昇状態の作業装置が地面まで自動的に下降駆動されるように構成した場合、作業装置が下降駆動されるタイミングのばらつきを抑える。
【解決手段】機体が旋回を開始したと判断する旋回開始判断手段と、旋回開始判断手段により機体が旋回を開始したと判断されてからの旋回中の機体の走行距離Eを連続的に検出する走行距離検出手段とを備える。走行距離検出手段により検出された機体の走行距離Eが設定距離E1に達すると、上昇状態の作業装置を地面まで自動的に下降駆動させる自動下降手段を備える。
(もっと読む)
水田作業機のラインマーカ
【課題】 水田の土壌条件によってラインマーカによる線引きが、明確に行われたり、不明確である場合があり、この線引きが不明確なときは、作業者の視認が難くなり、車体の操向性を行い難くなる。
【解決手段】 水田を走行しながら対地作業する作業機の横側に出没して、土壌面に操向指標の線引きを行う土掻きラグを有したラインマーカ1を、この接地部を強制的に駆動回転して土壌面を掻き起して線引きする。このラインマーカ1のモータ等による強制駆動によって回転されると、土壌面の線引部が土掻きラグによって、土壌面部が深く、乃至高く掻き起されて、線引を明確に形成する。
(もっと読む)
走行散布作業機
【課題】GPS信号に基づき走行散布作業機の位置情報を得て、隣接位置での重複した農作業を行なうことがないようにした走行散布作業機を提供すること。
【解決手段】GPSより得られる位置情報から機体の直進方位と、旋回開始位置から90度旋回して旋回戻し位置(e地点)に達した後、さらに90度旋回して直進する隣接作業方位を求め、肥料噴管からの粉粒体の散布幅を読込み、求めた直進方位と隣接作業方位から両方位間の移動距離d1を算出し、隣接作業方位から隣接作業方位と旋回戻し位置の移動距離d2を算出し、移動距離d1から隣接作業方位と前記旋回戻し位置の間隔を差し引いて前記間隔(移動距離d1−d2)を算出し、旋回開始位置と旋回戻し位置の間隔(移動距離d1−d2)を位置情報に変換して旋回戻し位置を求め、旋回を開始すると粉粒体散布装置を駆動停止させ、隣接作業位置(f地点)に達すると粉粒体肥料散布装置を駆動開始させる。
(もっと読む)
水田作業車
【課題】水田作業車において、人為操作具及び前輪の操向操作による作業装置の非作業状態への操作により旋回開始位置が検出された場合、作業終了位置(旋回開始位置)と作業開始位置(旋回終了位置)とが、畦から略同じ位置になるように構成する。
【解決手段】人為操作具による作業装置5の非作業状態への操作に基づく機体の旋回終了位置E31と、前輪1の操向操作による作業装置5の非作業状態への操作に基づく機体の旋回終了位置E32との差が小さくなるように、旋回終了位置E32を機体の旋回行程L1,L2に沿って旋回開始位置E12側に移動させる(θ1,E31参照)。
(もっと読む)
田植機
【課題】 本発明の課題は、機体旋回後の農作業装置の取扱いを可能な範囲で旋回動作と連動して自動処理することにより、オペレータの負荷を最小限度に抑えることができる自動植付作業車用制御装置を提供する点にある。
【解決手段】 操舵ハンドルとオペレータシートを備え、転向車輪と後輪の4輪で駆動する構成とし、機体後部に昇降部を介して昇降可能に植付部を設けた田植機において、旋回時のハンドル操作に基づいて後輪のドライブシャフト回転のカウントを開始し、該カウントが第一の所定値(n2’)になったときにハンドル角度が規定値(b)以上でなく、その後、カウントが第二の所定値(n2)になったとき、植付クラッチを入にする連動制御を備え、カウントが第一の所定値(n2’)になったときにハンドル角度が規定値(b)以上であれば、連動制御を終了する制御装置を設けた。
(もっと読む)
農作業機
【課題】走行中は作溝器が不用意に圃場に作溝跡を作って、圃場を荒らさないようにした農作業機を提供すること。
【解決手段】ハンドル操向角度検出センサ109によりハンドル14が所定値まで操向操作されると制御装置110により、まず作溝器用油圧シリンダ89が作溝位置にある作溝器(溝切り装置)95を非作溝位置まで上昇させ、次いで播種装置用油圧シリンダ46を作動させて作業位置にある播種装置82を非作業位置まで上昇させ、また旋回終了直前又は旋回終了を判断すると、まず播種装置82が作業位置まで下降させ、次いで作溝器95を作溝位置まで下降する作動を行わせることで、作溝器95を播種装置82より先に上昇させて、また上昇した作溝器95を播種装置82より後で圃場に降ろすことで、圃場を荒らしたり、作物を傷めたりすることを防止できる。
(もっと読む)
作業車
【課題】作業車において旋回する場合に旋回終了位置を適切に検出し、作業装置が適切に作業状態に操作されるように構成する。
【解決手段】機体の走行距離Gと、操向操作自在な車輪1の直進位置からの操向角度とにより、作業行程からの旋回開始L01に基づいて、旋回開始前の機体の進行方向+Y,−Yでの旋回中の機体の位置を検出する。旋回開始位置E1の検出に基づいて、アクチュエータを作業装置5の非作業状態側に作動させ、旋回終了位置E3の検出に基づいて、アクチュエータを作業装置5の作業状態側に作動させる。アクチュエータの作業装置5の作業状態側への作動開始時期を変更可能に構成する。
(もっと読む)
農作業車
【課題】 往復植付け走行から枕地の周回植付け作業に入った時に、不適正な農作業装置の稼動を回避できるように制御すると共に、マーカの作動精度上昇によって作業性が向上する農作業車を提供する。
【解決手段】 機体の旋回動作を検出する旋回検出手段により検出される旋回開始のタイミングと対応して農作業装置の停止と走行距離計の計測開始を指令し、その走行距離から判定される旋回完了による次行程の作業開始位置への到達によって上記農作業装置の稼動を指令する旋回制御を行う制御処理部を備える農作業車において、左右の後輪の回転数を検出する回転センサーに基づき、左右のマーカのうち回転数の多い側のマーカを出す制御を行う。
(もっと読む)
可変散布装置
【課題】GPSからの速度情報が得られない場合にも常に車速を正確に知ることができる散布装置を提供すること。
【解決手段】GPSから位置情報と速度情報を受信するGPS受信機78によりGPSから速度情報を得て、車速センサ37から車輪4又は5の回転数を検出し、両方の速度情報に基づき肥料散布装置1による肥料散布量を算出し、GPS速度情報が得られないときには、車速センサ37で得られる車速に基づき車速を算出して肥料散布量を決める乗用管理機である。そして肥料などの散布途中でGPSからの車速データが得られなくなっても、車速データを補正しながらスリップの影響が少なく精度良い散布作業を継続できる。
(もっと読む)
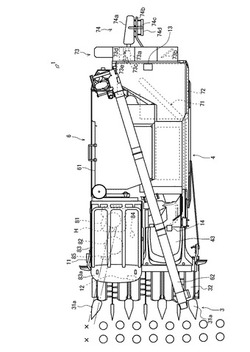
コンバイン
【課題】可変容積型油圧ポンプ及び可変容積型油圧モータを有する走行用HSTと機械式の多段変速装置とが走行系伝動経路に直列的に介挿され、前記走行用油圧モータが走行モード切替操作部材への人為操作に基づき選択的に小容積状態又は大容積状態とされるコンバインにおいて、低速走行させる必要がある場合における走行安全性を向上させる。
【解決手段】制御装置は、副変速検出センサからの信号に基づき前記多段変速装置が最低速段に係合していると判断する場合には、前記走行モード切替操作部材からの人為操作信号に拘わらず前記走行用油圧モータが大容積状態となるように走行モード切替作動機構を強制的に作動制御する。
(もっと読む)
トラクタの旋回制御装置
【課題】枕地における斜め方向への耕耘土の跳ね飛ばしを少なくして、耕耘面の仕上がりを良好に保持することができると共に、旋回時の車速の大小に拘わらず前輪倍速装置が作動するまでに機体が走行する距離を一定とし、最適な旋回タイミングを見つけ出し易くする。
【解決手段】前輪Zが操舵されると、作業機21を上昇させると共に、前輪Zを倍速駆動させて機体の旋回を行うトラクタTの制御装置22において、前輪Zが所定の操舵角以上に操舵されたことを検出するのに伴って作業機21を上昇させる制御を開始すると共に、この上昇制御が開始された後、機体が設定距離以上に走行したことを検出するのに伴って前輪Zの倍速駆動を開始する。
(もっと読む)
自律走行苗移植機
【課題】本発明では、野菜苗等のポット苗を自律走行しながら畝に移植する苗移植機で、畝上を走行しながら畝の終端に達すると反転して隣の畝に移動して苗の移植を継続できるようにする自律走行苗移植機を提供することが課題である。
【解決手段】走行機体13の底部に畝Uの上面に接触して畝Uを検出する畝センサ28を設け、該畝センサ28が畝Uの終端を検出するとUターン制御を開始して隣の畝Uに移動すべく制御して自律走行苗移植機を構成した。
(もっと読む)
農業用管理システム
【課題】多数の圃場の中から正確に農作業をする圃場を識別することができるGPS衛星を利用した管理システムを提供すること。
【解決手段】農業機械10の電子制御機器11は、記録媒体16の情報を読み取ると、GPS衛星13からの電波の受信により割り出した農業機械10の圃場識別情報Aと記録媒体16から読み取った特定の圃場の位置情報Bと照合して農業機械10のモニタ12に圃場識別情報Aと特定の圃場の位置情報Bを表示させ、農業機械10が当該特定の圃場の位置に到着すると、当該特定の圃場の圃場内情報Cを表示させる機構を備えているので、特定の圃場位置情報Bに対応する圃場識別情報Aを交互に又は同時にモニタ12に表示しながら移動できるので、その地域の土地勘のないオペレータも迷うことなく前記特定の圃場に到着できる。
(もっと読む)
作業車輌の前輪操向装置
【課題】複数の操舵角、操舵方向、及び操舵速度を検出できるものでありながら、簡単な構成とすることが可能な作業車輌の前輪操向装置を提供する。
【解決手段】前輪操向装置20は、大径部45a,45c,45f及び小径部45b,45d,45e,45gを有する軸状カム部材45と、該軸状カム部材45が貫通配置された位置検出シリンダ43と、該位置検出シリンダ43に固定された左検出スイッチ41及び右検出スイッチ42とを有する操舵位置検出装置40を備えて構成されている。軸状カム部材45は、操向操作に基づいて移動し、中立状態から最大操舵角となるまでの間で、左検出スイッチ41及び右検出スイッチ42に操舵角に応じた複数回の状態変化を出力させることにより複数段階の操舵角を検出する。また、これら複数の操舵角間の変位時間から、マイコンが演算することで操舵速度を検出する。
(もっと読む)
苗植機
【課題】
左右前輪、左右後輪が畝溝を走行し、機体の左右への倒れを防止しながら畝溝に隣接する左右の畝の左右両側部に苗の植え付け作業をする苗植機を提供する。
【解決手段】
上下動機構4により上下動して圃場に苗を植え付ける左右苗植付け体5、左右苗植付け体5へ苗を供給する苗供給装置24、苗落下供給機構27等を備えた苗植機において、左右前輪6及び後輪7のトレッドを幅狭に構成し、左右転倒防止輪141のトレッドを幅広で且つ左右前輪6及び後輪7よりも高位に位置するように構成し、左右前輪6及び後輪7が畝溝UMを走行し、左右転倒防止輪141が畝溝UMに隣接する左右の畝U上面を走行しながら、左右苗植付け体5により畝溝UMに隣接する左右畝Uの左右両側部に苗を植え付ける。
(もっと読む)
苗植機の苗植制御装置
【課題】 苗植条行程の終端部で走行方向の折返旋回操向を行うときは、操作タイミングが難しく、このタイミングのずれによって苗植付け条間間隔や、植付位置の不揃い等が生じ易い。
【解決手段】 ステアリングハンドルの操向により、車体に対して苗植装置を上昇すると共に、植付クラッチ5を切りにして走行旋回する苗植機において、この折返し走行旋回位置をGPSから入力することことによって、前記苗植装置を下降して植付クラッチ5を入りにする。
(もっと読む)
刈取収穫機
【課題】 機体を自動操向操作により走行させながら植立茎稈の刈取作業を行うことが可能でありながら、植立茎稈の刈残し等が発生しない良好な状態で且つ能率よく刈取作業を行うことが可能となる刈取収穫機を提供する。
【解決手段】 対地位置検出手段にて求められる機体の対地位置情報に基づいて機体が作業対象領域内の設定経路に沿って走行するように、機体の向きを変更操作自在な操向操作手段29を制御する制御手段Hが備えられ、その制御手段Hが、設定経路における植立茎稈を刈り取る刈取用経路部分を走行するときに、対茎稈位置検出手段83にて検出される植立茎稈に対する機体の横幅方向の位置が刈取用の適正位置から外れると、対地位置検出手段の検出情報にかかわらず、対茎稈位置検出手段83の検出情報に基づいて機体の横幅方向の位置が適正位置になるように操向操作手段29を制御する。
(もっと読む)
作業車の制御装置
【課題】圃場の状況や作業の内容に合わせて、精度よく車体の状態を作業状態から非作業状態に切り換えることができる作業車の制御装置を実現する。
【解決手段】作業車の制御装置において、操縦ハンドル6の操舵速度がしきい値以上で、且つ、前輪2の切れ角が所定角度以上であると、車体1の状態を作業状態から非作業状態に切り換える車体状態切換手段51,53を備えて、車速検出手段63により検出した車速が速くなる程、しきい値Kを高く設定してある。
(もっと読む)
作業車の制御装置
【課題】旋回作業に伴うものでない可能性の高い操縦ハンドルの操作で作業装置が自動的に上昇することを防止し、作業装置の上昇を適切なタイミングで行うことができる作業車の制御装置を実現する。
【解決手段】作業車の制御装置において、切れ角が所定上昇角度α1以上になると、作業装置Rを上昇させる自動上昇手段53を備え、操縦ハンドル6が右側又は左側の一方側に操作された直後に、操縦ハンドル6が右側又は左側の他方側に操作され、他方側への操縦ハンドル6の操作により切れ角が所定上昇角度α1以上になった場合に、自動上昇手段53が作動しないように制御する制御手段を備えてある。
(もっと読む)
21 - 40 / 79
[ Back to top ]