
Fターム[2B043AB15]の内容
農業機械一般(操向) (6,001) | 目的、効果又は機能 (649) | 作業性能向上 (110)
Fターム[2B043AB15]の下位に属するFターム
傾斜地に適用 (8)
湿田又は軟弱路面に適用 (23)
Fターム[2B043AB15]に分類される特許
41 - 60 / 79
作業車の制御装置
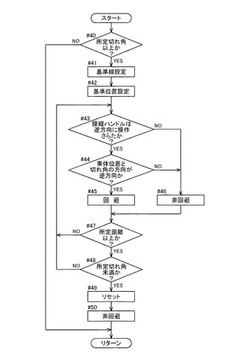
【課題】旋回作業に伴うものでない可能性の高い操縦ハンドルの操作で作業装置が自動的に上昇することを防止し、作業装置の上昇を適切なタイミングで行うことができる作業車の制御装置を実現する。
【解決手段】作業車の制御装置において、切れ角が所定上昇角度α1以上になると、作業装置Rを上昇させる自動上昇手段53を備え、操縦ハンドル6が右側又は左側の一方側に操作された直後に、操縦ハンドル6が右側又は左側の他方側に操作され、他方側への操縦ハンドル6の操作により切れ角が所定上昇角度α1以上になった場合に、自動上昇手段53が作動しないように制御する制御手段を備えてある。
(もっと読む)
コンバインの方向制御装置

【課題】左右方向及び前後方向の株間を共に例えば30cmとした粗植栽培方式の圃場において、コンバインの方向制御を迅速に実行する。
【解決手段】刈取搬送部(6)に刈取対象穀稈への接近状態を検出できる方向センサ(21)を設け、該方向センサ(21)の検出結果に基づいて機体を操向させるように方向制御出力を行なうと共に刈取対象穀稈列の条横判定制御を行なう制御部(26)を設け、方向制御スイッチ(32)が入りで、前記条横判定入切スイッチ(31)が切りのときには、前記制御部(26)は条横判定をせずに方向制御出力をする構成とする。
(もっと読む)
作業車の走行変速構造
【課題】 作業車の走行変速構造において、旋回時の機体の安定性を確保しながら、作業能率の向上を図る。
【解決手段】 機体の旋回開始時に速度センサーによって検出された機体の走行速度V1が、事前に設定された設定速度V11よりも高速であると、機体の走行速度V1を減速操作する減速手段を備える。機体の旋回開始が検出された場合において、機体の旋回開始時に速度センサーによって検出された機体の走行速度V1が、設定速度V11よりも低速であると、減速手段の作動を阻止する牽制手段を備える。
(もっと読む)
移植機
【課題】機体の外側方に振出されて次植付行程への指標を圃場面に形成する左右一対のサイドマーカの振出しに連動して整地体を左右方向に変位させることが可能な移植機において、利便性及び汎用性が高い移植機を提供することを課題とする。
【解決手段】走行機体3の後方に昇降可能に連結された植付作業機7と、植付作業機7の前方で左右方向に並列され圃場の整地を行う整地体9と、整地体9を左右方向に移動させる移動機構とを備えた移植機において、機体の外側方に振出されて次植付行程への指標を圃場面に形成する左右一対のサイドマーカ11と、整地体9の左右移動及び左右のサイドマーカ11の振出し制御を行う制御部79とを設け、制御部79が整地体9をサイドマーカ11の振出し方向に自動的に変位させるモードと、整地体9をサイドマーカ11の振出し方向とは関係無く左右方向中立位置に位置決め可能なモードとを有する。
(もっと読む)
乗用型耕耘機
【課題】耕耘用のローターの昇降に伴って各部が動いたり各部の間隔が変化したときに、動力伝達装置がそれらに素早く追従して動くことができるようにしてローターの迅速な昇降操作を可能とした乗用型耕耘機を提供する。
【解決手段】乗用型耕耘機(A)は、前輪と後輪の間に設けられ昇降動可能な耕耘用のローターと、ローターを昇降動させる昇降操作装置(8)と、ローターを駆動する耕耘駆動系(7)と、前輪を駆動する走行駆動系(5)とを有し、走行駆動系(5)と耕耘駆動系(7)には動力伝達装置(4)で原動機(E)の動力が伝えられ、走行駆動系(5)と耕耘駆動系(7)は一体となって回動軸(56)を中心として回動可能で、動力伝達装置(4)は基端がユニバーサルジョイント(41)を介し動力取出軸(13)に接続されている伸縮可能なドライブシャフト(42)と、ドライブシャフト(42)から伝えられる動力を走行駆動系(5)と耕耘駆動系(7)に分配する動力分配軸とを備えている。
(もっと読む)
農用作業機
【課題】水田などの走行不安定な圃場において安定走行を実現することができる農用作業機を提供する。
【解決手段】
走行検知手段により走行機体の走行状態を検知し、安定制御手段によりその走行状態と予め設定した走行条件とを比較演算し、もし、設定条件と異なる走行状態である場合、機体を安定制御する信号を走行安定化手段に出力し、その走行安定化手段により機体の走行状態を安定化させるので、水田などの走行不安定な圃場において、スタックなどに陥ることなく安定走行を実現することができる。
(もっと読む)
作業車の作業装置昇降構造
【課題】作業車の作業装置昇降構造において、旋回の終了に伴って上昇状態の作業装置が地面まで自動的に下降駆動されるように構成した場合、作業装置が下降駆動されるタイミングのばらつきを抑える。
【解決手段】機体の走行距離を検出する走行距離検出手段27を備える。作業装置の上昇操作に基づいて、機体の走行距離の検出が開始される。機体の走行距離が設定距離に達すると、上昇状態の作業装置を地面まで自動的に下降駆動する自動下降手段を備える。
(もっと読む)
畦成形機
【課題】 走行機の蛇行に対して畦成形作業部を直進させることが困難であった。
【解決手段】装着フレーム1と、支持フレーム2と、制御部8と、検知部7と、盛土部及び成畦部とを有する畦成形作業部5とを具備し走行機Tに装着され作業する畦成形機であり、走行機Tが畦Rに平行して走行しながら畦Rを成形する標準畦成形作業と、走行機Tが畦Rとの間隔を離隔走行しながら畦を成形する離隔畦成形作業と、走行機Tが畦Rとの間隔を狭めながら幅寄せ走行しながら畦を成形する幅寄せ畦成形作業とを行なうことができ、制御部8は、走行機Tが蛇行走行した場合であっても畦成形作業部5の姿勢を自動的に直線の畦を成形できる向きに制御可能な畦成形機による。
(もっと読む)
作業車
【課題】ロータリ耕耘装置を下降位置から上昇させる際に形成される耕耘跡の発生を防止でき、圃場での農作業の作業性を向上させることのできる作業車を実現する。
【解決手段】走行車体1の後部に装備されたロータリ耕耘装置Fを昇降駆動する昇降機構8,9と、操作指示を出す操作指示手段37と、を備え、操作指示手段37からの操作指示に基づいて、ロータリ耕耘装置Fを予め設定された中間位置から上昇位置まで上昇させる速度よりも低速で、ロータリ耕耘装置Fを下降位置から中間位置まで上昇させるように、昇降機構8,9を駆動させる耕耘装置自動上昇手段を備えて、作業車を構成する。
(もっと読む)
畦成形機
【課題】従来圃場隅部の作業を行なう作業機は、圃場隅部における畦方向への成形圧力が減少するため堅固な畦を形成できない課題がある。
【課題手段】装着フレーム1から斜め後方へ固定されて延設される支持フレーム2と、支持フレーム2に設けられるとともに、装着フレーム1との距離を伸縮させる水平移動手段4によって支持フレーム2に沿って装着フレーム1に対して遠近移動可能であり、かつ遠近移動可能である1つの水平回動軸54を中心に水平回動手段6又は自由回動によって水平方向に回動可能である畦成形作業部5と、畦成形作業部5の前側に設けられる前部案内輪7と、畦成形作業部5の後側に設けられる後部案内輪8とを有し、支持フレーム2に沿って装着フレーム1に対して遠近移動する畦成形作業部5の水平回動軸54が、常に前部案内輪7と後部案内輪8との間に位置するように設けられる畦成形機による。
(もっと読む)
乗用型棚下作業車
【課題】 棚下作業において、両手を使って管理作業や収穫作業を能率よく行いながら、自走車体の移動方向修正を疲労少なく軽快に行うことのできる乗用型棚下作業車を提供する。
【解決手段】 自走車体1に操向自在な車輪2を備え、この操向用の車輪2を運転座席5の前方に配備された操縦ハンドル4と足元の操縦ペダル28によって、操向操作可能に構成してある。好ましくは、操縦ペダル28に、踏み込み操作によって自走車体を発進させ、踏み込み解除によって自走車体を停止させる足踏み操作式の発進操作具29を備える。
(もっと読む)
農用作業車
【課題】自律走行を行う農用作業車において、オペレータが現在の機体位置の情報(即ち、機体位置が目標経路または目標方向に合致しているか否か、または、目標経路と合致していない場合には機体のズレ方向)を容易に知ることができる技術を提供する。
【解決手段】目標経路の生成後において、該目標経路に対する田植機1の機体位置の変位方向を表示し、かつ、田植機1が自律走行可能か否かを表示する自律走行位置表示ランプ45を具備する構成とする。
(もっと読む)
畦塗り機及びその作業部向き調整方法
【課題】圃場の隅まで連続的に畦塗り作業を行なう。
【解決手段】畦塗り機1は作業部30を旧畦U0の一辺Faに沿うように作業部の向きを調整可能な作業部位置調整装置61を有する。作業部位置調整装置61は、オフセットフレーム10の後端部に回動自在に設けられた作業部30の向きが旧畦U0の一辺Faと略平行にあるか否かを走行機体80から目視確認可能なマーカ64と、オフセットフレーム10を旋回動させる旋回シリンダ13及び作業部30を回動させる回動シリンダ57の動作を操作可能なアクチュエータ操作装置67を有する。走行機体80に搭乗した作業者Mは、マーカ64を目視して作業部30の向きが一辺Faと略平行になるようにアクチュエータ操作装置67を操作する。
(もっと読む)
作業車両
【課題】操向ハンドル10の回動操作に応じて走行機体を左又は右に旋回させる構成の作業車両において、走行機体の進行方向を修正する際に、操向ハンドル10を細かく切り足したり切り戻したりする手間をなくす。
【解決手段】操向ハンドル10のハンドルホイル部94に、走行機体の進行方向を微調節操作するためのステアリングスイッチ100を備える。ステアリングスイッチ100における左右方向の操作は、操向ハンドル10の回動操作に拘らず、常に許容される構成にする。すなわち、ステアリングスイッチ100と操向ハンドル10とは互いに独立的に操作し得るように構成する。そして、操向ハンドル10の単位操作量に対する走行機体1の旋回動作量は、ステアリングスイッチ100の単位操作量に対する走行機体1の旋回動作量と比べて格段に大きく設定する。
(もっと読む)
走行機に連結される畦形成機
【課題】容易な操作により制御部を切り換え走行機の異なる姿勢に対し常に一定の方向の直線状畦を形成する畦形成機を目標とする。
【解決手段】連結部は、装着フレームに設ける回動支点を中心に水平方向に回動可能であるとともに装着フレームと畦形成部間の距離を伸縮可能に設けており、制御部は、走行機が略直線状に前進して走行機と平行な直線状に畦形成作業する場合と、走行機が旋回しながら直線状に畦形成作業する場合とに対応して切換え可能であり、走行機が旋回しながら作業する場合の制御部は、装着フレームに設けた連結部の回動支点の回動変位量の情報を基に、あらかじめ設定されたプログラムにより連結部の回動支点の回動変位量に対応して装着フレームと畦形成部間の距離を変更させ、走行機が旋回移動するのに対し畦形成部は連続して直線状に移動しつつ畦形成作業を行わせる走行機に連結される畦形成機による。
(もっと読む)
農業用管理システム
【課題】多数の圃場の中から正確に農作業をする圃場を識別することができるGPS衛星を利用した管理システムを提供すること。
【解決手段】トラクタ10に設けた電子制御機器(ECU)11は、GPS13からの電波の受信により割り出して得られる各圃場ごとに圃場NOを付与した地図情報上のトラクタの所在する圃場NOを情報端末モニタ画面12に表示できるようにし、トラクタのECUと、該ECUに接続された携帯端末から無線通信により前記圃場NOを含む各種情報を基地局に発信する。携帯端末が基地局へ各種情報を送信する時に自動的に無線通信を開始し、基地局での前記各種情報の受信完了時点で無線通信を自動的に切断する携帯端末の通信制御機構と、前記圃場NOが携帯端末から入力されると、GPSからの電波の受信により割り出した農業機械の圃場識別情報を正しい圃場NO情報に補正してトラクタの情報端末モニタ画面に表示させる指令を基地局に送る圃場識別情報補正制御機構とを備えている。
(もっと読む)
作業機
【課題】 圃面の状況の如何にかかわらず走行基準線を確認しながら作業走行を容易に行い得る作業機を提供する。
【解決手段】 所望の走行方向を指し示す走行基準線Xと、その走行基準線Xに沿って進むべき走行機体の現在位置を示す機体標示73とを表示する液晶表示部69を設け、液晶表示部69を運転操縦部に備えてある。
(もっと読む)
複数条植え移植機及び複数条植え移植機による植付け方法
【課題】畦クラッチ等による煩雑な植付け条調整操作および植付け条別苗量管理による煩雑な苗補給を要することなく、植付け作業能率の向上とともに機体構成の簡易化を可能とする複数条植え移植機および同複数条植え移植機による植付方法を提供する。
【解決手段】複数条植え移植機は、往復植付け行程による植付け範囲の圃場幅Bをその一側端から所定の植付け条間寸法で且つ所定の植付け条数で複数条植え走行するように構成され、上記圃場幅Bを認識する認識手段と、該認識手段で認識する圃場幅Bを往復植付け行程の行程間ピッチDを前記所定の植付け条間寸法として等間隔に往復植付けするものとした場合に生じる植付け条数に満たない未植付け部分の幅に基づいて、前記圃場幅B全体を植付け条数の整数倍の条数で植付けできるように往復植付け行程の行程間ピッチDを演算する演算手段とを設けたものである。
(もっと読む)
農作業支援機器のための農業用資材と該農業用資材を用いた農地、並びに該農地における農作業支援機器の進行方向認識方法
【課題】各種農作業を支援する機器が、農作業に従事する人に何ら負担を掛けることなく、農地に作られた畝に添って正確に自律走行し、生育した作物の収穫作業支援や農薬散布など、各種農作業を確実に支援できるようにする、農作業支援機器のための農業用資材と該農業用資材を用いた農地、並びに該農地における農作業支援機器の進行方向認識方法を提供することが課題である。
【解決手段】農地に作られた畝を覆うマルチフィルムの、埋設位置内側の長手方向に畝位置認識用の線を設け、農作業支援機器がその畝位置認識用の線を認識することで農地に作られた畝に添って正確に自律走行できるようにした。
(もっと読む)
作業車
【課題】 作業走行を終えて次の作業箇所に旋回走行して移動するとともに次の作業箇所に自走車体を位置合わせするに当たり、迅速に移動することができ、かつ、精度よく容易に位置合わせすることができる作業車を提供する。
【解決手段】 主変速装置17に連係された制御手段21に、走行速度検出手段22を連係させるとともに旋回角度計測手段30を備えてある。旋回角度計測手段30による計測旋回角度が設定旋回角度になると、制御手段21は、自走車体が低速設定手段24による設定低速度で走行するように、主変速装置17を減速操作する。
(もっと読む)
41 - 60 / 79
[ Back to top ]