
Fターム[2B043EB23]の内容
農業機械一般(操向) (6,001) | センサの構成、配置又は取付け (441) | センサの配置又は取付け (104) | 車両本体又は作業機 (102) | 車両の前方又は後方 (29)
Fターム[2B043EB23]に分類される特許
1 - 20 / 29
苗移植機
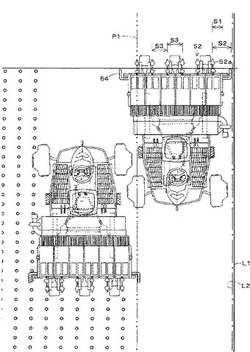
【課題】作業者が目視できない機体後方の苗植付装置とその近傍の情報を操縦席に着席したまま確認できるようにして、正しい圃場位置に苗を植え付けることができる構成を備えた苗移植機を提供すること。
【解決手段】苗を積載する複数条の苗タンク51に苗タンク51と走行車体2後方の情報を検出するCCDカメラ48と、該CCDカメラ48が検出した情報を表示する表示装置16を操縦部33に配置し、カメラ48が検出した情報から苗の植付条列や畦際を制御装置100で判断し、表示装置16に次の植付作業位置を示す第1植付仮想線P1及び圃場と畦際の境界線を示す第1畦際仮想線L1を出力することにより、走行車体2の後方の苗の植付状態や苗タンク51に積載した苗の状態を操縦部33から移動することなく確認することができ、苗の植付姿勢や植付深さの変更を速やかに行えるため、苗の植付姿勢が安定する。
(もっと読む)
苗移植機

【課題】旋回操作連動で植付部を昇降制御する場合に、下降時の植付部の保護と圃場面の検出精度を損なうことなく、速やかに植付を再開できる苗移植機を提供する。
【解決手段】苗移植機は、圃場走行用の走行部(2,3)と、苗移植の作業高さを検出する圃場面センサ(6s)を備えて昇降リンク(5)により昇降可能な植付部(6)と、この植付部(6)を左右水平に角度調節するローリング機構(7)と、の旋回開始で植付部(6)を上昇保持し、旋回終了で作業高さに戻す旋回連動昇降機構とを設けて構成され、上記植付部(6)の高さ位置を検出する位置検知装置(5s)を設け、この位置検知装置(5s)により、旋回開始時の植付部(6)の作業高さを記憶するとともに、旋回終了時の植付部(6)の下降の際に、記憶による作業高さ位置から上方に所定距離の高さ位置を境にその上下で下降速度を切替え制御可能に上記旋回連動昇降機構を構成したものである。
(もっと読む)
水田作業機
【課題】水田作業機において、畦際での旋回終了を適切に検出する。
【解決手段】右の車輪2に動力を伝達する右のサイドクラッチ40と、左の車輪2に動力を伝達する左のサイドクラッチ40とを備える。操向操作自在な車輪1が直進位置A1側から右又は左の操向限度A3側に操向操作されると、右又は左のサイドクラッチ40が遮断状態に操作され、操向操作自在な車輪1が右又は左の操向限度A3側から直進位置A1側に操作されると、遮断状態に操作された右又は左のサイドクラッチ40が伝動状態に操作されるように構成する。車輪2の回転数に基づいて機体の前進及び後進の走行距離を検出する走行距離検出手段を備える。遮断状態に操作された右又は左のサイドクラッチ40が伝動状態に操作されたことと、走行距離検出手段で検出された機体の前進の走行距離と機体の後進の走行距離との差、とに基づいて旋回終了を検出する。
(もっと読む)
芝刈機
【課題】境界検出手段を支持するための支持構造を簡単なものにすることが可能でありながら、境界検出手段により既刈り領域と未刈り領域との刈跡境界を精度よく検出することが可能となる芝刈機を提供する。
【解決手段】走行駆動装置11R,11Lにより直進並びに旋回走行自在に走行駆動される走行機体の走行に伴って芝を刈り取るモーア4と、既刈り領域と未刈り領域との刈跡境界を検出する境界検出手段Qと、境界検出手段Qの検出情報に基づいて走行用の所定の制御を実行する制御手段とを備え、境界検出手段Qが、モーア4の刈刃ハウジング7における前側縦壁部7B1の前面にて芝の存否を検出するように構成されている。
(もっと読む)
田植機
【課題】正面にポールを立設することなく、簡易な操作で苗を整列させることができる田植機を提供することを目的とする。
【解決手段】往路又は復路において、操作者がGUI151a又は151bを選択することによって、右フロントカメラ又は左フロントカメラが撮像した画像を撮像表示部151に表示させる構成とした。また既設の情報表示部と撮像表示部151とを一体化した。またいわゆるバックモニタとして撮像表示部151を使用できる構成とした。
(もっと読む)
田植機
【課題】圃場の環境に左右されることなく、進行方向と苗の並び方向とを確実に整合させることができる田植機を提供する。
【解決手段】左フロントカメラ及び右フロントカメラ21にて圃場に植え付けられた苗を撮像し、撮像された苗を表示部8に表示する。操作者は、表示部8に表示された苗の並び方向を確認して田植機を操舵し、表示部8に表示された線を最も端に位置する苗の列に一致させて、進行方向と苗の並び方向とを整合させることができる構成とした。
(もっと読む)
作業車両の自動走行制御装置
【課題】自動走行による作業に必要な目標の数量を低減出来、その目標の設置の手間も低減出来る作業車両の自動走行制御装置を提供すること。
【解決手段】トラクタ1に設けられたカメラ部8と、カメラ部8により撮像される予め設置された遠目標200の画像情報に基づいて、直進走行を行う遠目標制御処理と、カメラ部8により撮像される作業の痕跡の画像情報に基づいて、倣い走行を行う倣い走行制御処理とを有する、トラクタ1の走行制御を行うカメラ制御部21及び車両制御部23とを備え、カメラ制御部21及び車両制御部23は、遠目標制御処理により直進走行を行わせた後、遠目標制御処理が解除され、トラクタ1が旋回された後、倣い走行制御処理により倣い走行を行わせる、トラクタ1の自動走行制御装置である。
(もっと読む)
水田除草ロボット
【課題】条間、株間を自由に移動し、且つ、安定した除草効果が得られる除草ロボットを提供する。
【解決手段】水田除草ロボット1は、水田の稲株が通過可能な逆凹状の空間を有したメインフレーム10は、その下部に、車輪19A,19B、車輪19A,19Bを回転駆動する駆動部11A,11B、車輪19A,19Bの前後に配置されて水田除草ロボット1に浮力を生じさせる第1のフロート20A〜20D、全部に設けられて水田内の稲株を検知するセンサレバー23A,23B、メインフレーム10に搭載されたセンサ類に基づいて駆動部11A,11Bを駆動し、車輪19A,19Bの回転を制御する。これにより、水田除草ロボット1は稲株を避けながら自律走行する。
(もっと読む)
作業車両
【課題】圃場の路面状況を適確に把握できると共に、圃場の状態に応じた旋回及び走行が可能で作業効率や操作性が向上する作業車両の提供である。
【解決手段】走行機体Tの後部に装着した作業機Rと、後輪3のブレーキと、前輪2の操作ハンドル7と、前方の路面状況を撮影するCCDカメラ15と、前方の障害物までの距離を検出する超音波センサ17と、旋回時期を報知するブザー50と、CCDカメラ15の画像から前方の障害物までの距離を算出し、超音波センサ17による検出距離とほぼ同じである場合に、旋回までの走行距離を算出して旋回時にブザー50などにより報知すると共にハンドル7操作により走行機体Tが旋回すると作業機Rを上昇させて旋回内側の後輪3のブレーキを作動させ、旋回が終了するとCCDカメラ15の画像から未耕地と既耕地を判断して作業機Rの下降位置を判定し作業機Rを下降させる制御を行う制御装置とを設けた作業車両である。
(もっと読む)
作業車両
【課題】
本発明の課題は、旋回時の車速が速く設定されている場合にあっても、植付作業部をタイミング良く下降させて畦に対する干渉や空植えを防止することにある。
【解決手段】
この発明は、操向ハンドルの左右旋回操作によって前輪が左又は右に操向操作されると、旋回外側の後輪の回転速度に対して旋回内側の後輪の回転速度が所定速度以下になったとき旋回内側のサイドクラッチを強制的に「入」にして旋回内側の後輪を所定の回転量だけ強制駆動する旋回制御手段(TC)を備えた作業車両において、機体旋回時に作業部を上昇させ、機体旋回開始後、所定角度旋回すると作業部を所定位置に下降させる作業部昇降制御手段(UD)を備え、車速が速く設定されている場合には、作業部の下げ速度を増速制御する下降速度制御手段(DV)を設けてあることを特徴とする。
(もっと読む)
コンバイン
【課題】穀稈の状況に応じた適切な進路を把握でき、刈取作業が行いやすくなるコンバインを提供する。
【解決手段】走行部2と、前記走行部2の前方に配置される刈取部3と、前記刈取部3の後方で前記走行部2の前部上に配置される運転部8とを備えるコンバイン1であって、前記運転部の前方を撮影する第一撮影手段12と、前記第一撮影手段12により撮影された映像を表示する表示装置85と、前記運転部8の操向操作手段(ハンドル82)の操作量に基づいて予測進路軌跡Bを作成する制御装置97とを備え、前記制御装置97は、前記予測進路軌跡Bを前記第一撮影手段12により撮影された映像に重畳させ、この予測進路軌跡Bが重畳された映像を前記表示装置85に表示させる。
(もっと読む)
コンバイン
【課題】デバイダが穀稈の株を割らずに分草し、円滑に穀稈を搬送すると共に乱れなく穀稈を刈取り可能な8条刈りのコンバインを提供する。
【解決手段】8条刈りのコンバイン1は、9本のデバイダを有していると共に、これら9本のデバイダのうち左端から数えて4番目、右端から数えて6番目の機体内側のデバイダを刈取り基準位置としている。上記9本のデバイダは、刈取り基準位置のデバイダが左右の穀稈の中央に位置する際、尺植え及び尺一寸植えのどちらでも穀稈の株を割らないように配設されている。また、この刈取り基準位置のデバイダを支持するデバイダフレーム23aには、方向自動制御用の方向センサ18が取付けられており、この方向センサ18の左右のセンサバー18L,18Rと穀稈とが接触すると、その接触した側のセンサバー18L,18Rとは逆方向に機体の進行方向が修正される。
(もっと読む)
走行車両
【課題】多条植えの乗用型作業機が、たとえ湿田走行中であっても、前進の場合は所望の走行経路で旋回が可能となるとともに、後進の場合については、安定して後進旋回することができる走行車両を提供する。
【解決手段】走行車両は、走行車体(2)と、旋回内側の走行推進体(11)の駆動を断続的に入/切する旋回連動機構(A)と、走行車体(2)の旋回時において、旋回内側の走行推進体(11)の駆動を旋回連動機構(A)により断続的に入/切する周期を変更する制御装置(163)を備えて構成され、上記走行車体(2)には、その前後進の方向を検出する前後進検出手段(90)を設け、この前後進検出手段(90)の後進検出信号を条件として上記制御装置(163)により、走行車体(2)の旋回時において、旋回内側の走行推進体(11)の駆動を連続的に入として制御するものである。
(もっと読む)
農薬散布用ホバークラフト
【課題】特別なテクニックを要せずに、ラダーの向きを変え推進力を加えることで容易に離岸することができる農薬散布用ホバークラフトを提供する。
【解決手段】ホバークラフト本体5と、進行方向と進行速度の他、種々の設定を所望に遠隔制御する無線信号を送信すると共に、CCDカメラ12によって映し出される船艇前方の映像信号を受信しモニタ31に現出する他、畦道や土手等の障害物に対する接近状態を感知した際、超音波センサー装置11が送信する警告信号を受信し、スピーカー30から警告音を発生させるコントローラ26の組み合わせから構成されており、農薬散布用ホバークラフト1は、ホバークラフト本体5の船首6近傍上甲板及び船尾7近傍上甲板に設けられた固定具17間にグラスファィバー製の離岸ロッド16が右舷8縁及び左舷9縁より側方に円弧状膨出して張架されていることに特徴する。
(もっと読む)
コンバインの方向制御装置
【課題】左右方向及び前後方向の株間を共に例えば30cmとした粗植栽培方式の圃場において、コンバインの方向制御を迅速に実行する。
【解決手段】刈取搬送部(6)に刈取対象穀稈への接近状態を検出できる方向センサ(21)を設け、該方向センサ(21)の検出結果に基づいて機体を操向させるように方向制御出力を行なうと共に刈取対象穀稈列の条横判定制御を行なう制御部(26)を設け、方向制御スイッチ(32)が入りで、前記条横判定入切スイッチ(31)が切りのときには、前記制御部(26)は条横判定をせずに方向制御出力をする構成とする。
(もっと読む)
移動車両の直進誘導システム
【課題】運転者の負担を軽減し、熟練者でなくても高能率・高精度な作業ができる移動車両の直進誘導システムを提供する。
【解決手段】この移動車両の直進誘導システムは、移動車両搭載部1、移動車両が直進走行すべき走路前方の延長線上に設置される遠方目標部2を備える。移動車両搭載部1はカメラ部11、カメラ部11からの画像を処理し走行情報を出力する画像処理部12、走行情報に基づき移動車両を制御する車両制御部14,操向制御機構15を有する。遠方目標部2はカメラ部11の撮像周期と最大露光時間の合計時間以上で撮像周期の2倍以下の時間の点灯と消灯とを繰り返す。画像処理部12は現フレームと前フレーム及び、現フレームと前々フレームにおいて第1,第2の遠方目標部候補画素を抽出し、第1,第2の遠方目標部候補画素を統合し、統合した遠方目標部候補画素に対し遠方目標部2の位置検出を行い、検出結果に基づき走行情報を生成する。
(もっと読む)
車両
【課題】 簡単な構成で検出した物体に応じた適正な走行制御をすることができる車両を提供すること。
【解決手段】 カート路CRを走行するゴルフカート10に、前方に超音波を発信し、障害物に衝突したときに反射してくる超音波を受信することにより前方に障害物があることを検出するとともにその大きさを検出する対象物センサ31,32と、対象物センサ31,32による障害物の検出の有無および対象物センサ31,32が障害物を検出したときにはその大きさに応じてゴルフカート10の走行を制御するコントローラ25とを設けた。また、対象物センサ31,32から発信される超音波による検出範囲の幅をゴルフカート10の幅よりも少し大きくなる程度に規制するための規制部材31a,32aを対象物センサ31,32に設けた。
(もっと読む)
畦成形機
【課題】従来の畦成形機は、構成や制御が複雑となり、操作が難しいとともに保守点検等にコストが係り全体のコストが嵩む問題があった。
【解決手段】装着フレーム1と、支持フレーム回動軸20を中心に水平回動手段25によって回動可能である支持フレーム2と、支持フレーム2に沿って移動可能に設けられるとともに水平回動する畦成形作業部3と、一端を装着フレーム1の支持フレーム回動軸20よりも前側に回動自在に設けるとともに他端は畦成形作業部3に回動自在に設け装着フレーム1と畦成形作業部3とを連結する連結部材7とを有し、支持フレーム2を走行機Tの直進方向と直交する方向から45度の回動角以内の予め設定した位置に自動回動させ、自動回動させた位置から支持フレーム2を回動させるとともに走行機Tが畦から離れる方向に旋回走行しながら直線状の畦を成形する畦成形作業を行なう畦成形機による。
(もっと読む)
作物列検知装置、作物列追従装置および農業用作業機
【課題】 根菜類収穫機や除草機等の農業用作業機に対する作物列の位置ズレを高精度に検知できることはもとより、畝および作物列に対する追従性を向上させて接触アームに対する農業用作業機の振動やブレの影響を抑制することができ、なおかつ、農業用作業機の後退時に接触アームが畝に突き刺さって破損するのを防止することができる作物列検知装置、作物列追従装置および農業用作業機を提供する。
【解決手段】 作業機3に対し上下平行リンク機構41によって上下動自在に支持される上下動支持部材4と、この上下動支持部材4の下端部に揺動自在に軸支される揺動フレーム5と、固定ブラケット61、回動垂下ブラケット62および揺動ブラケット63から構成される左右平行リンク6と、各回動垂下ブラケットの下端部に固定される一対の接触アーム7,7と、これら接触アーム7,7の左右方向の変位を検出する左右変位センサ8とを有している。
(もっと読む)
作業機
【課題】 圃面の状況の如何にかかわらず走行基準線を確認しながら作業走行を容易に行い得る作業機を提供する。
【解決手段】 所望の走行方向を指し示す走行基準線Xと、その走行基準線Xに沿って進むべき走行機体の現在位置を示す機体標示73とを表示する液晶表示部69を設け、液晶表示部69を運転操縦部に備えてある。
(もっと読む)
1 - 20 / 29
[ Back to top ]