
Fターム[2B062CA05]の内容
移植機(田植機の要素) (4,646) | 制御 (808) | コンピュータ制御 (173)
Fターム[2B062CA05]に分類される特許
41 - 60 / 173
水田作業機
【課題】操作者に無用な混乱を生じさせることなく良好に、人為操作に基づいてエンジン自動停止処理及びエンジン自動始動処理を実行することが可能となる水田作業機を提供する。
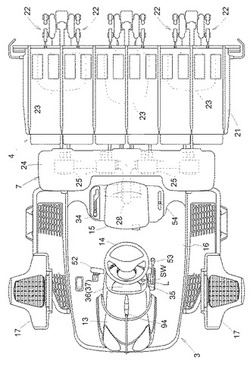
【解決手段】エンジンを搭載した走行機体3に機体各部の作動を制御する制御手段が備えられ、制御手段が、キースイッチがオン操作されている状態において、キースイッチ以外の操作具であり且つ異なる2つの操作具52,53のうちのいずれか一方の操作具53のエンジン停止用の操作に伴って、エンジン自動停止処理を実行し、2つの操作具52,53のうちの他方の操作具52のエンジン始動用の操作に伴って、エンジン自動始動処理を実行するように構成されている。
(もっと読む)
水田作業機

【課題】キースイッチ以外の他の操作具の操作に基づいてエンジン自動停止処理を実行してエンジンの作動を停止させたのちにおいて、車体が急発進したりエンストを起す等の不利のない状態でエンジンを始動させることが可能となる水田作業機を提供する。
【解決手段】制御手段が、キースイッチがオン操作されている状態において、キースイッチ以外の他の操作具の操作に基づいてエンジンの作動を停止させるエンジン自動停止処理を実行したのちにおいて、停止位置検出スイッチにてエンジン始動操作が行われたことが検出され、且つ、ブレーキセンサにて走行機体停止操作が行われたことが検出されると、エンジンを始動させるエンジン自動始動処理を実行する。
(もっと読む)
苗移植機
【課題】
圃場に凹凸がある度に植付部の植付深さが変更されると、かえって苗の植付深さが不安定になるため、機体が設定値以上傾斜するとアクチュエータの制御弁の作動時間が長くなる制御を行なう。
【解決手段】
苗を圃場に植え付ける植付装置4を備えた植付部5を走行車体8の後部に設け、植付部5を昇降させるアクチュエータ9を設け、センタフロート1の上下揺動によってアクチュエータ9の制御弁10を切り替えて植付部5を昇降させ、苗の植付深さを所定深さに維持する植付昇降制御可能に構成した苗移植機において、走行車体8に傾斜センサ11を設け、傾斜センサ11が検知する走行車体8の前後方向の設定値以上の傾斜を検出するとこの検出値から制御弁10を出力作動するまでの間の応答時間を長くする制御を行なう構成とする。
(もっと読む)
苗移植機
【課題】
急激な加速または減速の際に、植付装置が前後に振れ続ける脈動が発生することを防止し、苗の植付間隔が乱れることを防止する。
【解決手段】
苗の植付間隔を調節する植付間隔調節レバー11を設け、苗の植付間隔が「広い」である場合、圃場を走行する車体8の走行速度を操作する変速操作レバー6を設け、車体8の後部に苗を積載して送り出す苗植装置5を設け、苗載台2から植付爪1で苗を掻き取って植え付ける植付装置4を設け、植付装置4を不等速回転する構成とした苗移植機において、車体8に駆動力を供給するエンジン9と車速を増速または減速させる油圧無段変速装置7Aを設け、変速操作レバー6を操作して加速または減速を完了するとエンジン9の回転数を増加または減少させる制御、または油圧無段変速装置7Aを増速または減速方向に作動させる制御行なう制御装置38を設けて構成する。
(もっと読む)
苗移植機
【課題】作業者が苗植付装置の入切や苗植付部の昇降などを操作することなく、作業者の労力の軽減が図れると共に、苗の植付作業の効率が向上する苗移植機の提供である。
【解決手段】左右前輪10及び左右後輪11と、フレーム15と、左右前輪10を操向操作するハンドル34と、ハンドル34の操向角度を検出する切れ角センサ93と、フレーム15の後方に昇降リンク装置3を介して昇降可能に連結し、苗載台51と苗植付装置52とを備えた苗植付部4と、苗植付装置52の作業状態切替レバー68と、昇降リンク装置3の油圧シリンダ46や油圧バルブ80などの昇降手段と、切れ角センサ93の値に応じて昇降手段による苗植付部4の昇降及び切替レバー68の切替を制御する制御装置100とを設けた苗移植機である。ハンドル操作に苗植付部4の昇降と苗植付装置52の入切が連動するため、作業者が苗植付装置52の入切をする必要がなく、労力が軽減する。
(もっと読む)
乗用型苗移植機
【課題】 乗用型苗移植機において、旋回時に、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入り切り操作や作業装置の上昇・下降操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性の点において課題があった。
【解決手段】 ステアリングハンドルにて操向操作される左右前輪と、左右後輪を設けた走行車両に、苗移植作業装置を昇降自在に装着した乗用型苗移植機において、走行距離算出手段にて苗移植作業装置を上昇させる指令を出力してからの走行距離を算出して、該走行距離に応じて制御することにより、先ず苗移植作業装置が下降する指令を出力し、その後に線引きマーカを下降させる自動旋回モードを設けた。
(もっと読む)
移植機
【課題】操作性が良くかつ迅速に振出し方向の切換えを行うことのできる線引きマーカを備えた移植機を提供する。
【解決手段】植付部が上方位置にある場合、機体左側の線引きマーカが作業姿勢に設定されている状態で、作業機操作レバーを前方側に傾倒操作すると、左右の線引きマーカが共に作業姿勢になる両落ち状態が設定され、この両落ち状態が設定された状態で再度、作業機操作レバーを再度前方側に操作すると、機体左側の線引きマーカが収納姿勢に設定される(ステップS54〜S59)。また、植付部が下方位置にある場合、機体左側の線引きマーカが作業姿勢に設定されている状態で、作業機操作レバーを前方側に傾倒操作すると、機体左側の線引きマーカが収納姿勢に設定されると共に、機体右側の線引きマーカが作業姿勢に設定される(ステップS54,S55,S58,S59)。
(もっと読む)
移植機
【課題】線引きマーカの収納忘れを防止した移植機を提供する。
【解決手段】機体左側の線引きマーカは、作業機操作レバーが後方側に操作されることによって、収納姿勢と作業姿勢とに交互に切換わり(ステップS44〜S47)、機体右側の線引きマーカは、作業機操作レバーが前方側に操作されることによって、収納姿勢と作業姿勢とに交互に切換わる(ステップS48〜S51)。また、これら左右の線引きマーカは、マーカ自動スイッチが切操作されると、両上げ状態となり、マーカ自動スイッチが入操作されると、両上げ状態まえの姿勢に復帰する(ステップS52〜S54)。
(もっと読む)
乗用型田植機
【課題】植付部が自動的に昇降する際の安全性を向上させた乗用型田植機を提供する。
【解決手段】乗用型田植機は、車体と、報知部と、植付部と、植付部を上下に昇降するための昇降シリンダと、昇降シリンダの駆動を制御する制御部と、を備える。そして、前記制御部は、植付部を自動的に昇降させる制御を開始するトリガを検出した場合、前記報知部によって植付部の自動昇降を報知した後、昇降シリンダを駆動して植付部を昇降させる。
(もっと読む)
農業用作業車両
【課題】簡単な構成で旋回操作の開始及び終了を検出することが可能な農業用作業車両を提供する。
【解決手段】サイドクラッチ操作機構45は、ステアリングハンドル7が所定の操作量以上操作された場合に、サイドクラッチを切断する。クラッチセンサ49L,49Rは、サイドクラッチの作動状況を検出可能である。制御部は、植付部を昇降駆動するための昇降シリンダの駆動を制御する。植付クラッチは、植付部に対する駆動力の伝達の有無を切換可能である。また、前記制御部は、植付部の作動中において、植付クラッチの切断、サイドクラッチの切断、及び後進操作を、旋回時自動昇降制御の開始トリガとして検出可能である。そして、前記制御部は、開始トリガのうち何れか1つを検出すると、植付部を上昇させ、その後、前記サイドクラッチの接続を検出すると、植付部を下降させる。
(もっと読む)
乗用田植機
【課題】所望の箇所で正確に苗植付装置を下降可能な乗用田植機を提供する。
【解決手段】制御部50が、旋回時前期にて、植付クラッチ51、サイドクラッチ55をこの順に切り、旋回時後期にて、サイドクラッチ55、植付クラッチ51をこの順に入れる。そして、エンジン12から後輪17へ駆動力の伝達するための出力軸EOをサイドクラッチ55の上流側に備え、後輪17の回転数を検出する回転センサ54を出力軸EOに設け、旋回時後期にて、植付クラッチ51を入れるタイミングを、旋回時における植付クラッチ51を切ってからサイドクラッチ55を切るまでの間の回転センサ54の回転数と既定の回転数との和に基づいて制御部50が決定する。
(もっと読む)
作業機
【課題】 本発明は、機体の小回り旋回性を維持しながら、各種の状況に応じて適切に圃場が荒れるのを抑えることを課題とする。
【解決手段】 操向手段の操作を検出する旋回角度センサ(193)と、ステアリング機構により前輪が直進状態から操舵状態へ操向されるのに連動して操向内側のサイドクラッチを断続的に入/切し、前輪が操舵状態から直進状態へ戻るのに連動して操向内側のサイドクラッチを常時入状態にする旋回連動機構と、耕盤の深さを検出する耕盤深さセンサ(48)を設け、耕盤が深いことを耕盤深さセンサ(48)により検出すると、旋回連動機構により断続的に入/切する周期における入状態の割合を大きく変更する制御装置(163)を備えた作業機とした。
(もっと読む)
田植機
【課題】操作感の良い線引マーカを備えた田植機を提供する。
【解決手段】走行機体の機体外側に振り出されて、植付け次工程における走行予定線を圃場面に線引きする左右一対の線引マーカ10Rは、マーカモータ15によって駆動されると共に、作業機操作レバーによって操作される。機体右側の線引マーカ10Rは、作業機操作レバーの前方側への傾倒操作により非作業位置Aから作業位置Bへと振り出されると共に、機体左側の線引マーカは、作業機操作レバーの後方側への傾倒操作により非作業位置Aから作業位置Bへと振り出される。これら左右の線引マーカ10Rが共に作業位置Bにある両下げ状態において、作業機操作レバーが前方側へ傾倒操作されると、機体右側の線引マーカ10Rは作業位置に維持されると共に、機体左側の線引マーカは作業位置Bから非作業位置Aへとなり、左右の線引きマーカの振出しが切換わる。
(もっと読む)
乗用型苗移植機
【課題】 操向用の左右前輪と左右後輪を設けた走行車両に苗移植作業装置を昇降自在に装着し、左右線引きマーカと該左右線引きマーカの作動を停止させるマーカ作動切替え操作具とを設けた乗用型苗移植機において、旋回時に、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入り切り操作や作業装置の上昇・下降操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性の点において課題があった。
【解決手段】 走行距離算出手段にて苗移植作業装置を上昇させる指令を出力してからの走行距離を算出して、該走行距離に応じて苗移植作業装置が下降する指令を出力する自動旋回制御を行なうと共に、旋回時の左右後輪の回転数を比較し、該回転数の多い左右一方側の線引きマーカを旋回後に線引き作用状態に切り替える制御装置を設けたことを特徴とする乗用型苗移植機とした。
(もっと読む)
作業車両
【課題】旋回内側後輪のスリップが発生する圃場状況にあっても、スリップによる不安定走行を回避して円滑な旋回走行を確保するとともに、後輪サイドクラッチの伝動ショックを緩和してオペレータおよび機体への負担を低減することができる作業車両を提供する。
【解決手段】作業車両は、旋回開始により、作業部4停止、サイドクラッチによる内側後輪動力の切断、その転動距離による作業部4の再稼動の一連の旋回連動制御をするように構成され、上記サイドクラッチは、摩擦板伝動により半クラッチ動作可能に構成した上で、制御装置163による旋回連動制御について、内側サイドクラッチの一定周期の断接動作によって旋回内側の後輪11に走行動力を間欠伝動可能に構成するとともに、間欠伝動のサイドクラッチ接続行程におけるサイドクラッチの動作速度を半クラッチを現出する動作速度に抑えるように構成したものである。
(もっと読む)
乗用型田植機
【課題】作業車において旋回の終了を適切に検出することができるように構成する。
【解決手段】機体の走行距離を検出する走行距離検出手段と、操向操作自在な前輪の直進位置からの操向角度を検出する操向角度検出手段とを備え、車輪2の回転数に基づいて機体の走行距離Gと、操向操作自在な車輪1の直進位置A1からの操向角度Aとにより、作業行程からの旋回開始に基づいて、旋回開始前の機体の進行方向での旋回中の機体の位置Y2を検出する。
(もっと読む)
田植機
【課題】植付の停止設定を行うスイッチの数が少なく、簡単な構成で、かつ、コンパクトな条止め操作部を備える田植機を提供する。
【解決手段】複数の植付条のうち、一部の植付条の植付けが停止可能な植付装置40を備える多条植えの田植機1において、前記植付装置40による一部の植付条の植付けを停止操作可能な操作部2を備え、前記操作部2は、左右一対のスイッチ3・4と、停止した植付条を認識可能に表示させる表示装置5A〜5Dとを有し、この左右一方のスイッチが操作される毎に、操作されたスイッチと左右同一側で最も外側に位置する植付条から順に植付けを停止させるものとされる。
(もっと読む)
乗用型田植機
【課題】 本発明の課題は、旋回時の苗植え付けなどの諸作動を自動的に行わせることができるようにすることである。
【解決手段】 機体上に設けたエンジンと、機体の進行方向に向かって左右に設けた左右前輪及び左右後輪と、該左右前輪を操向操作する操向操作具と、左右後輪のそれぞれの伝動軸に設けたエンジン駆動力を伝達・非伝達するクラッチと、操向操作具に連動して前記左右いずれかのクラッチを作動させる連動ロッド(180,180)とを備えた走行車両を設け、該走行車両には昇降用リンク装置を介して苗植付装置を装着した乗用型田植機において、操向操作具による操向角度の検出により旋回中であると判断すると、後輪の伝動軸の回転数を検出し、該回転数が第一の設定値を超えると苗植付装置を下降し、前記回転数が第二の設定値を超えると苗植付装置を作動させる制御装置を設けた。
(もっと読む)
水田作業車
【課題】水田作業車において、右及び左のマーカーの操作性を向上させる。
【解決手段】右又は左のマーカー19が作用姿勢に操作された作業行程の後に機体が畦際に達すると、作用姿勢の右又は左のマーカー19を格納姿勢に操作し、機体の旋回が行われて次の作業行程に入ると、格納された右又は左のマーカー19とは反対側のマーカー19を作用姿勢に操作するマーカー操作手段54を備える。マーカー操作手段54の作動状態においてマーカー操作手段54に優先して、右及び左のマーカー19を作用姿勢及び格納姿勢に操作する作業用人為操作具12を備える。
(もっと読む)
移植機
【課題】苗継ぎ等のために植付部に対して、左右スライドする苗載せ台を一方側端で停止させる端寄せモードへの切換えを、スムーズに行うことができる移植機を提供する。
【解決手段】苗載せ台14から苗を掻きとって圃場に植付ける植付部16、及び苗載せ台を植付部に対して左右往復移動させる横送り機構を有する植付作業機7と、植付作業機への動力を断続させる植付クラッチと、植付作業機の昇降及び植付クラッチの断続を操作する作業機操作具と、横送り機構を介して植付部に対する苗載せ台の左右動を制御する制御部11とを備え、該制御部が苗載せ台を左右の一方側端で停止させる端寄せモードを有する移植機において、作業機操作具の操作に優先して植付作業機の昇降を停止させる昇降停止操作具を備え、該昇降停止操作具の操作に基づく植付作業機の昇降高さ固定に起因して、端寄せモードへの切換えを行うように制御部を構成する。
(もっと読む)
41 - 60 / 173
[ Back to top ]