
Fターム[2F065FF33]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 時間測定 (457) | 速度既知又は別途測定 (59)
Fターム[2F065FF33]に分類される特許
1 - 20 / 59
FBGセンサの多点計測方法および多点計測装置
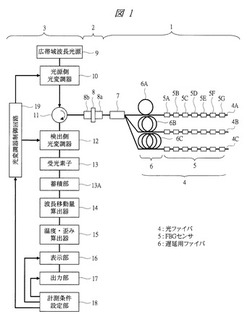
【課題】1本の伝送路で複数本の光ファイバを使用する状況においても、光スイッチを用いることなく、複数本の光ファイバのFBGセンサを計測可能なFBGセンサの多点計測方法および装置を提供する。
【解決手段】FBGセンサの多点計測装置において、コアに回折格子を形成した光ファイバ4と、広帯域波長光源9と、この光源からの光のうち、光ファイバ4に入射する光の時間を制御する光源側光変調器10と、この光変調器からの出射光を入射して、光ファイバ4の回折格子からの反射光を透過する時間を制御する検出側光変調器12と、この光変調器からの反射光を検出して得られた信号を処理して光ファイバ4からの信号を分離する波長移動量算出器14と、この算出器の結果から被測定物の変形量を算出する温度・歪み算出器15と、この被測定物の変形量に関する情報を表示する表示部16とを有する。
(もっと読む)
計測装置、検査装置及び計測方法

【課題】高速に搬送される計測対象の物体の3次元形状計測を高精度に行う。
【解決手段】プロジェクタ2は、Y軸方向に並ぶ明暗ピッチによりコード化されたスリットパターンがX軸方向に複数配列され、Y位置が同じビットデータを各スリットパターンから抽出してX軸方向に沿って並べたときのビット列の値がY軸方向に沿って線形に変化するように各スリットパターンがコード化されたスリットパターン像を、物体Mの搬送経路上に投影する。撮像装置3は、物体MがX軸方向に搬送されスリットパターン像を通過する様子を、プロジェクタ2とは異なる角度から撮像する。コード生成部6は、撮像された動画像に基づいて、物体M上における計測対象の位置が、各スリットパターンにそれぞれ到達したときの明暗をコード化する。高さ算出部7は、コード化されたコードに基づいて、計測対象の位置の高さを算出する。
(もっと読む)
画像計測装置、画像計測方法及びコンピュータプログラム
【課題】注目点の選定や注目点を追尾することが困難な複雑な形状の計測対象物であっても、また時間の経過とともに移動する計測対象物であっても、正確なキャリブレーションを実行することができ、所望の物理量を正確に計測することができる画像計測装置、画像計測方法、及びコンピュータプログラムを提供する。
【解決手段】フレーム画像をコマ送り再生表示し、コマ送り再生表示されたフレーム画像から、複数のフレーム画像の選択を受け付ける。選択を受け付けたフレーム画像を重ね合わせた合成画像を生成する。生成した合成画像を表示し、表示した合成画像上で所定の物理量を計測する。また、寸法が既知である球を計測対象物と同一の動画像に写り込むように配置し、計測対象物と球とを撮像して取得した動画像に基づいてキャリブレーションを実行する。
(もっと読む)
レーザ測距装置
【課題】簡単な測定作業で任意の多角形の面積を非接触で測定することの可能なレーザ測距装置を提供する。
【解決手段】レーザ測距装置1は、測定対象物10上の任意の多角形の面積を非接触で測定するレーザレーダ方式の測距装置である。2次元スキャナ3は、レーザダイオード2からのレーザ光を偏向させて測定対象物10上の任意の多角形の頂点A,B,…を照射する。フォトダイオード6は、各頂点A,B,…で反射したレーザ光を受光して信号を出力する。演算制御部7は、フォトダイオード6からの出力信号と2次元スキャナ3の動作情報を用いて多角形の面積を算出する。2次元スキャナ3は、測定対象となる多角形をレーザ光の2次元走査により描画表示する。
(もっと読む)
物品検査装置及び物品検査方法
【課題】従来の検査装置の設備をできるだけ利用しつつ、従来に比べて、撮像手段の配置の制約を緩和させ、より自由度の高い設定を可能とし、より汎用性が高く、取り扱いが容易な物品検査装置を低コストで提供する。
【解決手段】物品11を搬送する搬送手段2と、物品11を上方側から撮像する第1撮像手段3dと、側方側から撮像する第2撮像手段3a、3bと、制御手段6と、を備え、上面画像12及び側面画像13、14を取得し、実際の物品の長さが略同一となる対応関係を有する部位を基準部位とし、第1の長さL1として上面画像における基準部位の長さを測定し、第2の長さL2として側面画像における基準部位の長さを測定し、第3の長さL3として側面画像における測定部位の長さを測定し、第1の長さL1と第2の長さL2との対応関係に基づいて、第3の長さL3を補正して測定部位の長さXを算出する。
(もっと読む)
画像情報検出装置
【課題】 構成素子の配置誤差や画像情報検出装置自体の配置誤差に対して、パターンの検出位置精度が鈍感となる画像情報検出装置を提供すること。
【解決手段】 複数の感光ドラムを有するカラー画像形成装置の画像の重なりずれを検出する画像情報検出装置は、四角形の発光面を有する光源と、所定の方向に移動する像担持体と、四角形の受光面を有する受光手段と、前記光源の発光面と前記像担持体を共役関係にし、前記光源から出射された光束を前記像担持体上に形成された重なりずれ検出パターンに照射する照明光学系と、前記像担持体と前記受光手段の受光面を共役関係にし、前記重なりずれ検出パターンにて反射された光束を前記受光手段に導光する受光光学系と、を有し、前記発光面の前記像担持体上における共役像の輪郭を形成する発光面共役像直線部と前記受光面の前記像担持体上における共役像の輪郭を形成する受光面共役像直線部は平行である。
(もっと読む)
距離計測装置及び距離計測方法
【課題】車載単眼カメラを用いて、道路上にある案内看板や標識など対象物との距離を高精度に測定できる距離計測装置及び方法を提供する。
【解決手段】距離計測装置は、単眼カメラが撮影した異なるフレームの画像が入力され、その画像から対象物を検出する対象物検出部101と、対象物の2フレーム以上の画像を蓄積する対象物検出結果蓄積部102と、検出した対象物の画像上の長さまたは画素数などを算出する対象物スケール算出部103と、対象物の向きを対象物の特徴点から算出する対象物向き算出部104と、算出した対象物の向きおよび入力される車速センサーの車速情報に基づいて、車両が対象物に指向する速度を算出する対象物指向速度算出部105と、算出した対象物指向速度および算出した対象物の画像上のスケールに基づいて、対象物までの距離を計算し出力する対象物距離算出部106とを有する。
(もっと読む)
位置決め装置及び位置決め方法
【課題】測定対象となる物体の位置や姿勢を非接触で高精度に計測、制御する位置決め装置を提供する。
【解決手段】位置決め装置1は、参照光としての光周波数コムと測定光としての光周波数コムとを出射する光源10と、光源10から出射された測定光を測定対象40に取り付けられた反射体42に照射するヘッド部30と、光源10から出射された参照光が入射される参照面31と、反射体42で反射されヘッド部30を介して戻された測定光と、参照面31から戻された参照光との干渉光に基づく干渉信号を検出する検出部20と、検出部20により検出した干渉信号に基づいて参照面31までの距離を基準にした反射体42までの距離を求める信号処理部60と、測定対象40の位置を変化させるアクチュエータ50と、信号処理部60で求めた距離に応じてアクチュエータ50を制御する制御部70とを備える。
(もっと読む)
球状粒子径の計測装置および計測方法
【課題】透過性の無い粒子であっても計測可能で、かつサブミクロン程度の粒子でも高精度に粒子径を測定できる球状粒子径の計測装置および計測方法を提供する。
【解決手段】球状粒子1を2方向から照射する2つのレーザ光源2および3と、この照射光が球状粒子1の表面で正反射して生じる2つの輝点間の距離を計測するための測長手段と、計測した2つの輝点間の距離から前記球状粒子の径を算出する手段とを備える。
(もっと読む)
複数の物体間の相対移動を検出する方法
【課題】複数の物体間に相対移動が生じた場合に、相対移動を検出するためのセンサ等を用いることなく、画像処理により複数の物体間の相対移動を早期に検出することができる方法を提供する
【解決手段】ロボットハンド1は、CCDカメラ5により把持部4及び把持部4に把持されている物体9を含む部分画像Pを取得し、その部分画像Pから把持部4及び物体9をそれぞれ認識する。その後、認識された把持部4及び物体9の動きベクトルhi,wjをそれぞれ算出し、算出された動きベクトルhi,wjに基づいて、把持部4と物体9との間の滑り(相対移動)を検出する。これにより、把持部4と物体9との間に滑りが生じた場合に、滑りを検出するためのセンサ等を用いることなく、画像処理により把持部4と物体9との間の滑りを早期に検出することができる。
(もっと読む)
連続的に撮像したカラー画像及び距離画像の記録方法と結合方法ならびにその装置
【課題】本発明は、自動車(高速移動体)に搭載した3次元画像センサによって撮像した路面、橋梁、壁面などのカラー画像と距離画像と自動車(高速移動体)の走行(移動)データから、路面、橋梁、壁面などの3次元形状を把握する方法に関する。
【解決手段】走行する自動車(高速移動体)に搭載した3次元画像センサによって撮像した路面、橋梁、壁面などの距離画像と自動車(高速移動体)の走行(移動)速度、加速度、各速度の補助データから、各フレームごとにかかったカメラ座標系の並進と回転を検出する方法と、検出したカメラ座標系の並進と回転を補正して隣接フレーム間のカラー画像と距離画像を結合する方法と、複数フレームにわたる路面、橋梁、壁面などの3次元形状を把握する方法を提供する。
(もっと読む)
物体検知装置
【課題】被検知物の存在、方向、または距離だけでなく、形状や大きさをも検知することができる超小型物体検知装置を提供する。
【解決手段】物体検知装置1は、発光素子3と、これから照射された光を線状光に変換する回折光学素子4とを回転させる回転駆動手段と、前記線状光をその線方向と直交する方向に走査することによって形成される検知領域にある被検知物から反射された反射光を受けて反射光のパターンを生成する撮像素子5と、前記撮像素子により生成された前記反射光のパターンから前記被検知物の存在、その方向、形状又は大きさを検知する検知回路6とを備える。
(もっと読む)
三次元情報検出装置及び三次元情報検出方法
【課題】本発明は、高速に動く測定対象物に対しても、カメラから測定対象物までの距離を高精度な画像としてリアルタイムに検出する三次元情報検出装置及び三次元情報検出方法を提供することを目的とする。
【解決手段】強度変調光11を測定対象物200に照射する光源10と、
前記強度変調光の反射光12を受光し、該反射光の1周期の変調波に対して、又は所定の複数周期の変調波に対して、異なるタイミングでゲートを開放することにより撮像タイミングの異なる複数の画像61、62を取得する複数のゲート撮像素子41、42と、
前記複数の画像から、前記測定対象物の距離画像を算出する演算処理装置70と、を含むことを特徴とする。
(もっと読む)
コンベヤベルト全長測定装置
【課題】簡便かつ迅速に精度よく無端ベルトの全長を測定できるコンベヤベルト全長測定装置を提供すること。
【解決手段】ベルトコンベヤ5を構成する無端ベルト6に一定の測定間隔Lで設置する第1反射部材12及び第2反射部材13と、無端ベルト6に設置された反射部材12,13に向けて所定の光を出射するLED15aと反射部材12,13からの反射光を受光するフォトトランジスタ15bとからなるセンサ部15と、無端ベルト6が起動されているときに、センサ部15からの出力信号に基づいて反射部材12,13が一定距離を通過するのに要する通過時間を計測する計測制御部20と、計測制御部20によって計測された結果を表示すると共に必要な情報を表示する表示部21と、計測制御部20に所定の信号を入力する入力部22と、を備える。
(もっと読む)
非接触膜厚測定装置及び方法
【課題】分解能の高い非接触膜厚測定装置及び方法を提供する。
【解決手段】膜厚測定対象物に照射して反射されるテラヘルツエコーパルス光Lteの計測時系列波形を取得する計測時系列波形取得手段41と、膜厚測定対象物に代えて表面反射鏡を配置した状態で、発生手段4から発生されて検出されるテラヘルツパルス光Ltの基準時系列波形と前記計測時系列波形とから、膜厚測定対象物固有の時系列波形を演算する固有時系列波形演算手段42とを備え、固有時系列波形演算手段42は前記計測時系列波形をフーリエ変換して得た計測電場スペクトルに、前記基準時系列波形をフーリエ変換して得た基準電場スペクトル及び定数で表されるウィナー逆フィルターを乗じて固有電場スペクトルを求める固有電場スペクトル演算手段421と、前記定数を増減させて前記固有電場スペクトルを逆フーリエ変換して前記固有時系列波形を得る固有時系列波形演算手段422とを有する。
(もっと読む)
部材検査装置
【課題】複検査対象物の外観検査を所望の検査態様に応じて低コストで行うことが可能な部材検査装置を提供する。
【解決手段】部材検査装置1は、所定の画角をもって撮像することが可能な撮像手段4と、撮像手段4で撮像された画像を生成し、解析する画像処理手段5と、検査対象物Sの少なくとも一方向Xに対応する方向の画角を変化させるように、検査対象物Sからの光を反射させて、撮像手段4に入光させる反射手段3とを備える。
(もっと読む)
投影装置、投影装置制御方法、及び投影装置制御プログラム
【課題】測定者が測定対象物の大きさを迅速かつ確実に測定することができること。
【解決手段】画像を投影する投影装置において、前記投影装置と前記画像を投影される測定対象物との距離を検出する距離検出部と、前記距離検出部が検出した距離に基づいて、前記測定対象物に実寸大の目盛りの画像を投影する画像投影部と、を備えることを特徴とする投影装置。
(もっと読む)
ディジタルビデオフィルタおよび画像処理
【課題】 フーリエ変換の必要性を除去し、したがって時間のかかる乗算および加算を除去する、ビデオディジタル色画素フィルタリングおよびディジタル画像処理のための装置。
【解決手段】 それは、単純なソフトウェアを活用して各プロセッサがリアルタイム対話型ディジタル画像処理のレーテンシ問題を最小にする、ファーストイン/ファーストアウトメモリと連動して動作する新しい分散型コンピュータアーキテクチャを活用する。この分散処理アーキテクチャは、FIFOが1台のプロセッサからもう1台に半分処理されたデータを伝える、工場組立てラインと同様の方法で動作するように設定される。独特のメモリベースのシステムが、6自由度で移動する移動オブジェクトの、距離および回転ベクトルを含む動きベクトルを測定するのに用いられる。
(もっと読む)
欠陥検出装置及び方法
【課題】 欠陥の高さ方向位置を検出できる欠陥検出装置を提供する。
【解決手段】ガラス板99は一定の速度vで移動され、ステージ2の位置dはステージ位置検出装置4により検出される。照明装置1からマスク10を介してガラス板99に対して光を所定角度斜めに入射させ、画像検出装置3によりガラス板99下面で反射した反射光を検出する。入射光と反射光の両方で欠陥を検出し、その時間間隔を測定し、コントローラ5は前記所定角度と所定速度vと時間間隔に基づいて欠陥の高さ方向位置を演算する。
(もっと読む)
環境地図取得装置
【課題】路面の凹凸や設置誤差の影響を受けることなく、正確に形状を計測することができるようにする。
【解決手段】測定精度が低い点群データの測定領域を特定する低精度測定領域特定部13と、レーザ光の走査角度範囲が低精度測定領域特定部13により特定された測定領域を包含するように可動台4のロー角を制御して、レーザスキャナ5により測定された追加の点群データを収集するスキャン手法変更部15とを設け、形状特定部17がスキャン処理部11により収集された点群データとスキャン手法変更部15により収集された追加の点群データを合成し、合成後の点群データから反射物の形状を特定する。
(もっと読む)
1 - 20 / 59
[ Back to top ]