
Fターム[3C007EW00]の内容
マニピュレータ、ロボット (46,145) | 挟持装置の目的 (376)
Fターム[3C007EW00]の下位に属するFターム
異径物品挟持 (76)
物品の位置が開閉中心からずれた時の挟持 (41)
開閉ロック手段を有するもの (32)
開閉量の調整 (28)
開閉スピードの調整 (3)
コンパクト性 (50)
防塵/発塵対策 (21)
防熱/耐熱(冷却を含む) (6)
振動/衝撃対策 (23)
Fターム[3C007EW00]に分類される特許
1 - 20 / 96
把持装置
【課題】被把持物と接触する接触部を交換する必要が生じたとき、圧力センサ全体を交換することなく、その接触部のみ交換できるようにする。
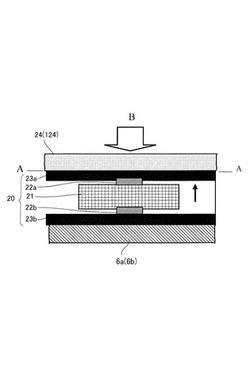
【解決手段】把持装置は、両側に電極22a,22bが設けられた圧電素子21を電極22a,22bに接続された1対のフレキシブル基板23a,23bで挟み込んで形成された圧電振動型圧力センサ20を、ワークを把持する把持部6の指先部6a及び中節部6bに圧電素子21と1対のフレキシブル基板23a,23bを把持部6の把持力方向に配置して備え、さらに、把持部6に着脱可能に設けられた耐油性、耐薬性の弾性を有するゴム製の保護層24を備えている。被覆部材の劣化、傷、摩耗、ヘタリが生じても、圧電振動型圧力センサ全体を交換する必要がなく、保護層24のみを交換できる。
(もっと読む)
把持ハンド、及び搬送装置

【課題】粘着性を有する物質の付着が低減された把持ハンド、及びその把持ハンドを用いた搬送装置を提供することを目的とする。
【解決手段】被把持部材を挟んで把持するハンド部において、ハンド部の少なくとも被把持部材に接触する部分が、基材21と、多孔質層22と、非粘着層23とで構成される。基材21は、粗面処理され、表面に凹凸形状が形成されている。多孔質層22は、基材21の粗面側に形成された複数の微細孔を有する。非粘着層23は、多孔質層22の表面に形成されている。
(もっと読む)
平行開閉式チャックハンド
【課題】円・楕円などの内径部を有するワークを把持することができ、かつ把持爪の曲げ強度を高めることができ、これにより重量の大きいワークを把持する場合でも、内径部との間に必要なクリアランスを確保することができる平行開閉式チャックハンドを提供する。
【解決手段】開位置と閉位置の間で平行に開閉駆動される1対の支持部材12,14と、支持部材に片持ち支持された広幅把持爪16及び狭幅把持爪18とを備える。広幅把持爪16は、開位置において幅方向の両端部16a,16bが内径部の内周面6,7に接触し、中間部が内周面に沿って延びかつ外方に湾曲した凹部16cを有する円弧状の断面形状を有する。狭幅把持爪18は、閉位置において広幅把持爪16の凹部16c嵌合する断面形状を有する。
(もっと読む)
開閉両方向に力を出せる把持装置
【課題】高速で駆動しかつ大きな把持力を得ることができ、開閉両方向に力を出せる把持装置を提供する。
【解決手段】第1の回転アクチュエータと、第1の回転アクチュエータで駆動される第1の動力伝達機構と、第1の動力伝達機構で駆動される第1の指と、第1の回転アクチュエータを固定載置する第1の台車と、第1の台車上に、第1の回転アクチュエータの回転軸と平行な方向に移動可能に載置した、第2の台車と、第2の台車に固定載置した第2の回転アクチュエータと、第2の回転アクチュエータの回転速度を減速する減速機と、減速機で駆動される第2の動力伝達機構と、第2の動力伝達機構の先端部に配置された押し板と、第1の指と共に物体を把持する、第2の指又は第1の固定壁と、を備え、第1の台車を、台座上に、第1の回転アクチュエータの回転軸と平行な方向に移動可能に載置し、台座には、第1及び第2の停止部と、第1及び第2のばねと、を備える。
(もっと読む)
マニピュレータ
【課題】相対的に小さい把持力量で対象物を把持できる状態と、より大きく、かつ調整可能な把持力量を発生させることができる状態とを使い分けることができるマニピュレータを提供する。
【解決手段】回動軸13で連結され、先端側に開閉する把持部14を有する第1鉗子片11及び第2鉗子片12を備えたマニピュレータ1は、一対の鉗子片の基端側に接続され、軸線方向に進退させることにより一対の鉗子片を開閉させる操作部材20と、第1のバネ定数を有し、弾性変形することにより把持部14に発生する把持力量を第1のバネ定数と操作部材20の牽引量とに基づいて変化させる第1緩衝部15B、16Bと、第1緩衝部15B、16Bの弾性変形を規制するストッパ17A、18Aとを備えることを特徴とする。
(もっと読む)
把持装置
【課題】耐磨耗性および耐切創性に優れ、かつ、良好な把持状態が保持できるとともに、容易に交換ができる当接部を備え、さらに当接部の交換が容易でありながら、当接部が該当接部の付設部に対して変位することを防止できる把持装置を提供する。
【解決手段】ワーク50を挟圧する各挟圧部4b・4b・5bを有する各爪部4・5と、弾性素材からなる内袋11と、該内袋11に充填される粒状物12と、を備え、内袋11内を減圧して、内袋11の内容積に対する粒状物12の体積比率を増大させることにより、粒状物12を任意の形状を保持しつつ硬化させる、各挟圧部4b・4b・5bのワーク50と当接する部位に付設される各当接部6・6・6と、を有する把持部2を備える把持装置1であって、各挟圧部4b・4b・5bの各当接部6・6・6を付設する付設面4g・4g・・・に、凹凸形状を有する各係止部10・10・・・を形成する。
(もっと読む)
ロボットハンドのフィンガ構造
【課題】部品Pを複数のフィンガ72により把持するロボットハンド7において、あまりコストのかからない簡単な構造で所要の把持性能が安定して得られ、十分な耐久性を確保できるとともに、狭隘な環境下でも使用しやすい優れた構造のフィンガ72を提供する。
【解決手段】複数のフィンガ72のそれぞれにコイルばね81を巻き付け、その両端を除いた中間部分の巻き線をフィンガ72の外周に沿って長手方向に変位可能に取り付ける。こうすると、それらのフィンガ72によって取り囲むように部品Pを把持したときに接触点Cの数が増大する可能性があり、個々の接触点における摩擦力はあまり大きくなくとも、部品Pを安定して把持することができる。部品Pの寸法、形状等に応じてコイルばね81の巻き線の太さやピッチを選定することが好ましい。
(もっと読む)
ロボットハンドとその爪部材交換方法
【課題】 形状又は寸法の異なるワークを把持することができ、交換用の部品の収容スペースを小さくでき、かつその交換のためアクチュエータが不要であるロボットハンドとその爪部材交換方法を提供する。
【解決手段】 ワークを把持するロボットハンド10。複数の末端爪部材12と、末端爪部材同士の間隔を開位置と閉位置の間で開閉するチャック装置14と、末端爪部材に着脱可能に片持ち支持された複数の先端爪部材16とを備える。先端爪部材16は、ワークに接触してこれを把持する把持面を有する。
(もっと読む)
ベローズ型吸着パッド、ロボットハンド、及び搬送ロボット
【課題】ベローズ型吸着パッド19による吸着状態の安定化を図りつつ、ベローズ型吸着パッド19の吸着力を向上させること。
【解決手段】パッド本体27にベローズ31が一体形成され、ベローズ31は、径方向外側へ突出した複数の山部33と径方向内側に窪んだ複数の谷部35を交互に有し、パッド本体27の軸心方向へ伸縮可能であって、ベローズ31の内部がパッド本体27の接続孔29に連通し、ベローズ31の各山部33の内側にワッシャ39が密着して配設されたこと。
(もっと読む)
つかみ装置
【課題】リークテストの時間短縮を図ることを目的とする。
【解決手段】弾性体からなるチューブ3の内側に硬質基体2が挿通され、硬質基体2の外周面にチューブ3の両端がそれぞれ全周に亘って固定されてチューブ3の内側が密閉されており、硬質基体2の軸方向一端部26に給排気口20が形成され、硬質基体2に、給排気口20とチューブ3の内側とを連通する第一空気通路21が形成されており、第一空気通路21を通ってチューブ3の内側にエアが流入することでチューブ3が膨張するつかみ装置1において、硬質基体2に、硬質基体2の軸方向一端部26から軸方向他端部25まで延在してチューブ3の軸方向他方側に向けて開口した第二空気通路24が複数形成されている。
(もっと読む)
パレタイズ装置
【課題】爪を有するハンド部でワークを把持し移動させてパレット上に整列積載するパレタイズ装置において、ワークの整列時にハンド部を引き抜く動作を不要として高速にパレタイズ可能とする。
【解決手段】本装置は、ワークWを把持するハンド部2と、ハンド部2を移動させ、ワークWを順次搬送してパレット7に整列して積載するアーム部3と、を備え、ハンド部2は、ワークWを把持する長爪21および退避爪22と、退避爪22を退避させる退避機構と、を備えている。アーム部3は、爪21,22によってワークWを把持したハンド部2を移動させてワークWをパレット7上に移動させ、ハンド部2がワークWを整列させる方向x1の前方側にある退避爪22を退避機構によって退避させ、前記方向x1の後方側にある長爪21によってワークWを押してワークWを整列させる。整列時に退避爪22が退避するので、ハンド部2を引き抜く必要がない。
(もっと読む)
グリッパ
【課題】 小型化を図ることが可能なグリッパを提供すること。
【解決手段】 駆動源と、上記駆動源により発生される運動を被把持物を把持する為の開閉運動に変換する把持部材と、を具備し、上記把持部材は反転にて形状安定なポジションを少なくとも2個持つものであり、それによって、簡単な構成で小型のグリッパを提供することができ、又、ギヤやカム等を使用した構成ではないので、摩擦もなく摩擦ロスによる機械効率低下も少ない。又、把持部材は少なくも2つの安定な形状を保持しているので、切り換えるときのみ通電すればよく、駆動源に対する通電時間を短くすることができる。
(もっと読む)
ロボットハンド
【課題】種々の対象物を容易に取り扱うことができるロボットハンドを提供する。
【解決手段】可動部2を移動させて可動部2の物体接触面Pを対象物に接触させ、スライドアクチュエータ13を作動させてピストン11をシリンダ9内に所定量だけ押し込み、シリンダ9内に貯留されていた水を供給管10を介して液体供給口8から物体接触面P上に供給する。これにより、水の表面張力に起因して物体接触面Pの摩擦係数が変化し、種々の対象物を取り扱うことが可能となる。物体接触面Pの摩擦係数を元に戻す場合には、可動部2の物体接触面Pに超音波振動を発生させ、この超音波振動によって物体接触面Pに残った水分を霧化蒸発させる。
(もっと読む)
アクチュエータ及び把持装置
【課題】構造が簡単で製造コストが安価であり、狭い場所にも適用可能な把持装置を提供すること。
【解決手段】1対の把持指の各々について、少なくとも端部が重なるように配置し連結された2枚以上の金属薄板1と、この連結側端部6の反対側端部において金属薄板を金属薄板の長さ方向に対して垂直に往復動させ、把持指の連結側端部を、応力作用により揺動動作させる手段を設けること特徴とする。この揺動動作により、把持対象物を抱き込み、確実に把持できる。
(もっと読む)
双腕ロボット及びそのハンドリング方法
【課題】双腕ロボット及びそのハンドリング方法において、パレタイズ時にワークを適切な位置に整列積載する。
【解決手段】双腕ロボットは、左右一対で構成されたワークを保持する第1ハンド部2a及び第2ハンド部2bと、制御部とを備える。両ハンド部2a、2bは、それぞれ長爪21と可動する短爪22とを有する。両ハンド部2a、2bによってワークWaを保持しているとき、制御部は、先に第1ハンド部2aを退避させ、ワークWaの第1ハンド部2a側の隅部を降下させる。次に、制御部は、第2ハンド部2bを退避させ、ワークWaの第2ハンド部2b側の隅部を降下させ、ワークWaをワークWb上に積載する。これにより、先の第1ハンド部2aの退避時においても、またその後の第2ハンド部2bの退避時においても、各ハンド部の摩擦力が動摩擦となり、それぞれの動作時にワークがハンド部に引っ張られることがなくなる。
(もっと読む)
双腕ロボット及びそのハンドリング方法
【課題】双腕ロボット及びそのハンドリング方法において、パレタイズ時にワークを歪むことなく保持する。
【解決手段】双腕ロボットは、左右一対で構成されたワークを保持する第1ハンド部2a及び第2ハンド部2bと、制御部とを備える。両ハンド部2a、2bは、それぞれ長爪21と可動する短爪22とを有する。ワークWがストッパ91によって位置決めされているとき、制御部は、両ハンド部2a、2bを移動させて両爪21、22の間にワークWを位置させる。そして、両ハンド部2a、2bを距離m1だけ移動させることにより、ワークWを押し動かしてワークWとストッパ91との間にクリアランスCを生じさせる。これにより、その後、両ハンド部2a、2bの短爪22を可動させても、ワークWがストッパ91に押し付けられて歪むことがなくなり、ワークWを長爪21に押し付けて保持することができる。
(もっと読む)
ロボットハンド用フィンガ
【課題】超音波アクチュエータの駆動停止後においても十分な把持力を維持することのできるロボットハンド用フィンガを提供する。
【解決手段】ロボットハンド用フィンガは、超音波アクチュエータにより対象物20を把持するものである。そして、ロボットハンド用フィンガは、超音波アクチュエータにより駆動されるフィンガ本体11と、フィンガ本体11の外表面11cにおける把持する対象物20に接触する部位を少なくとも覆う弾性を有する弾性層12とを備える。
(もっと読む)
ワーク把持ハンドの作動制御方法
【課題】一対の把持指が互いに接近する閉動作と互いに離間する開動作を繰り返し行うワーク把持ハンドにおいて、特定の歯に対して駆動負荷が集中することにより発生する偏摩耗を抑制することができる、ワーク把持ハンドの作動制御方法を提供する。
【解決手段】ピニオンギア8を間に挟んで相対する一対のラックギア5a、5bには、それぞれ把持指7a、7bが一体的に設けられている。ピニオンギアをモータにより正・逆回転させて一対の把持指7a、7bを互いに接近又は離間させることにより、ワークの把持および離脱動作を繰り返し行う。把持および離脱動作の繰り返しごとに一対の把持指7a、7bの待機位置を変化させることによって、ラックギア5a、5bのピニオンギア8との歯のかみ合い位置を変化させて、駆動負荷が集中するのを抑制する。
(もっと読む)
ロボットハンド及び移送ロボット
【課題】ハンド本体に対して移動可能な可動部としての可動フレーム、第2取付アーム、及び複数の第2クランパに作用する慣性力を相殺して、基板の実際のテンションの増大及び変動を十分に抑えること。
【解決手段】ハンド本体9の他端側に一対のカウンタウェイト33A,33Bがハンド長さ方向Lへ移動可能に設けられ、各第1滑車35A(35B)にカウンタウェイト33A(33B)と可動フレーム19を連結する第1連結ワイヤ39A(39B)が支持され、各第2滑車41A(41B)にカウンタウェイト33A(33B)と可動フレーム19を連結する第2連結ワイヤ45A(45B)が支持されていること。
(もっと読む)
電動グリッパ
【課題】 電動グリッパにおいて、軽量化を図り、部品点数を削減するとともに装置の構造を簡素化する。
【解決手段】 筺体12に固定されたステッピングモータ2の出力軸2aに円盤カム3が軸着され、筺体12と円盤カム3との間にねじりコイルばね6A,6Bが介装されている。円盤カム3の螺旋状に形成されたカム溝26A,26Bには、移動子33,33のベアリング36,36が係入され、移動子33,33はリニアガイド5によって直線的に移動するように支持されている。移動子33,33には、互いに閉じたときまたは互いに開いたときにワークを把持する把持部材4A,4Bが設けられている。
(もっと読む)
1 - 20 / 96
[ Back to top ]