
Fターム[3C007LS01]の内容
マニピュレータ、ロボット (46,145) | 教示(プログラム作成) (978) | 直接教示(オンライン・ティーチング) (244)
Fターム[3C007LS01]の下位に属するFターム
人手による教示 (25)
操作盤により動かして教示するもの (84)
撮像装置を用いた教示 (65)
特殊な教示方法(例;光、音等) (50)
Fターム[3C007LS01]に分類される特許
1 - 20 / 20
可動電極による溶接ワーク位置検出方法

【課題】スポット溶接システムにおいて、溶接ワークの表面位置の検出に要する時間を長くすることなく、可動電極による溶接ワークの表面位置の検出精度を向上させる。
【解決手段】サーボモータ34によって駆動される可動電極30とこれと対向して配置される対向電極32とを有するスポット溶接ガン14と、溶接ワークWとスポット溶接ガン14のうちの一方を保持する多関節ロボット12とを備えるスポット溶接システムにおいて、多関節ロボット12を用いて溶接ワークWとスポット溶接ガン14とを相対移動させることにより、可動電極30と溶接ワークWとを互いに離れた状態から接近させながら又は可動電極30と溶接ワークWとを互いに接触した状態から離反させながら、サーボモータ34の電流又はトルクを監視し、電流又はトルクの変化傾向が変化したときの可動電極30の位置と多関節ロボット12の位置とから溶接ワークWの表面位置を検出する。
(もっと読む)
搬送動作ティーチング方法

【課題】実物のワークが無くても、搬送装置に対してティーチングを行うことができ、多種類のワークを対象とする場合でも簡便にティーチングを行うことができ、ワークの把持位置を正確にティーチングすることができ、把持機構の部品を交換した場合の再ティーチングを簡単に行うことができる搬送動作ティーチング方法を提供する。
【解決手段】搬送動作ティーチング方法は、ワーク12を載置するためのパレット14上にある任意の箇所(基準部52)を、ワーク12を搬送する軌跡の基準点として設定する基準点設定工程と、予め、搬送装置10を動作させるための動作情報であって、基準点を原点とした座標系にて、基準点を基準に所定の軌跡に沿ってワーク12を搬送する動作を指示する動作情報を作成する動作情報作成工程と、動作情報に従って動作する搬送装置10に、実際のパレット14上にある基準点をティーチングするティーチング工程とを有する。
(もっと読む)
装着式動作補助装置及びその制御方法
【課題】本発明は生体信号の検出感度に応じたパラメータに補正することを課題とする。
【解決手段】動作補助装置10のキャリブレーション制御手段162は、装着者12が動作補助装着具を装着したときに、負荷発生手段164により電力増幅手段158に対して駆動源140からの駆動力を負荷(入力トルク)として装着者12に付与させる。そして、駆動源140からの駆動力を付与された装着者12は、予め決められた所定キャリブレーション動作を行って骨格筋から力を発生させる。これにより、上記キャリブレーション動作に伴って物理現象検出手段142が関節角度を検出し、生体信号検出手段144が筋電位信号を検出する。パラメータ補正手段156では、フェーズ特定手段152によって特定されたフェーズにおける差分導出手段154によって算出された負荷(入力トルク)と駆動力(筋力)との差に基づいてパラメータKを補正する。
(もっと読む)
ロボットのオフライン教示装置、ロボットのオフライン教示方法、及びロボットシステム
【課題】マニピュレータ、周辺装置、ワークに重力たわみが発生してもオフライン教示段階で事前に補正する。
【解決手段】本発明に係るロボットのオフライン教示装置20は、与えられた全教示点Piについて、ロボットマニピュレータ11、周辺装置13,14、ワーク15の重力たわみを考慮した補正教示点P'(i)を算出するステップと、補正後の移動経路を計算するステップと、補正後の移動経路における重力たわみ量を算出して、経路途中で重力たわみ量が予め定められた許容値を超えた場合に、経路途中に新たな教示点を挿入するステップとを含む、教示点挿入処理を実行する。
(もっと読む)
ロボット教示用治具
【課題】ボルトねじ込み前にねじ穴とナットランナーの位置合わせを迅速に実施することができるロボット教示技術を提供することを課題とする。
【解決手段】ロボット教示用治具10は、雄ねじ部20と軸部30と筒部40とからなる。また、筒部40にはナットランナー13のソケット部41を挿入することができる挿入部50が設けられている。加えて、挿入部50の中心は、雄ねじ部20の中心線51に合致するように配置されている。
【効果】挿入部50にナットランナー13のソケット部41を挿入するだけでナット14とナットランナー13の位置合わせを実施することができる。よって、ボルトねじ込み前にナット14とナットランナー13の位置合わせを迅速に実施することができるロボット教示用治具10を提供することができる。
(もっと読む)
ティーチング装置及びティーチング方法
【課題】搬送アームに対するキャリアステージの高さのティーチングを高精度に行えるようにすること。
【解決手段】ウェハを搬送する搬送アーム4と、ウェハを収納するキャリア1を搭載したキャリアステージ5とを備えた搬送装置での前記搬送アーム4に対するキャリアステージ5の高さをティーチングする際に用いるティーチング装置であって、キャリア1内のスロット台2上に配置される円板11と、円板11に取り付けられるとともにスロット台2に配置されている前記円板11の下に配された搬送アーム4と円板11との最適な隙間に設計された突起部を有するヘッド部材12と、を有するティーチング治具10と、突起部と搬送アーム4の電気的接触を検出する検出器20と、を備える。
(もっと読む)
溶接ロボットにおける溶接線座標の教示方法及び溶接ロボットの多層盛溶接におけるオフセット値の教示方法
【課題】多層盛溶接におけるオフセット値の教示方法を実行する際、2パス目以降の溶接線におけるオフセット値の教示作業の効率アップを図ることができる溶接ロボットにおける溶接線座標の教示方法を提供する。
【解決手段】
多層盛溶接の1パス目の各教示点で結ばれる線を溶接線とし、大地溶接線座標を設定し、1パス目のm点目の教示点位置に大地溶接線座標を基準にして溶接トーチを移動する。1パス目のm点目の教示点位置から2パス目以降の各パスの対応するオフセット予定位置へ大地溶接線座標を基準にして溶接トーチを移動させる。各パスにおけるオフセット予定位置に溶接トーチが移動する毎に、該溶接トーチの位置を教示し、1パス目の位置・姿勢との差分を2パス目以降の各パスにおける大地溶接線座標を基準にしたオフセット値として記録する。
(もっと読む)
ロボットプログラム作成装置
【課題】教示点を短時間修正しロボットや周辺設備を破損防止するプログラムの作成。
【解決手段】ロボットの教示点の情報とロボットの周囲環境モデルの情報とを格納する記憶部11を有しロボットプログラムをオフラインで作成するプログラミング部10と、ロボットの動作を制御しロボットを実際の教示点に移動させ実際の教示点の情報を捕えロボットプログラム上の教示点の情報を修正するロボット制御部20とを有し、プログラミング部10は、教示点の情報と周囲環境モデルの情報に基づきロボットをワークや障害物に干渉させずに現在位置から修正された教示点に向かって移動させる経路の生成手段12を有し、ロボット制御部20は、生成された経路に基づきロボットを修正された教示点に向かって移動させる手段22を備え、移動後に修正された教示点を再び実際の教示点の情報に置換えることでロボットプログラム上の教示点の情報を修正する。
(もっと読む)
ロボット制御方法
【課題】溶接トーチによりアーク溶接する際に教示する手間を最小限に減らすことができるロボット制御方法を提供すること。
【解決手段】被溶接物における溶接線の開始点及び目標点を教示し、当該溶接線を含む基準面を求める基準面算出する。次に、開始点と前記目標点とをつなぐ溶接線ベクトルと基準面とに基づき、溶接トーチを支持する溶接ロボットの溶接姿勢を制御する。そして、前回と今回の溶接線を教示するステップ間で、被溶接物の実際に溶接する面であるワーク面が変化するか否かを判定する。この判定の結果、教示ステップ間でワーク面が変化しない場合は前回の基準面を使用して溶接姿勢を制御する。
(もっと読む)
ハンドラのティーチング方法及びハンドラ
【課題】吸着パッドが半導体チップの上面に接触する高さ位置を、簡単な構成で高精度に求めることができるハンドラのティーチング方法及びハンドラを提供する。
【解決手段】吸着パッドを検査用ソケットに配置されたICチップに向かって下動させるとき、吸着パッドからエアーを噴射させながら下動させる。そして、検査用ソケットにICチップの上面に接触するとき、吸着パッドから噴射しているエアーが、ICチップにて塞がれるようにした。従って、エアーの噴射が塞がれることにより、吸引管内のエアーの圧力の上昇を圧力検出センサが検出することによって、吸着パッドが検査用ソケット内のICチップに接触する高さを求めることができる。
(もっと読む)
基板取り扱いロボットの改善した校正方法
加工システムにおけるロボットを校正する方法(500)が提供される。方法は、距離センサ(214)をロボットのエンドエフェクタ(102)に脱着自在に結合すること(502)、及び距離センサをしてセンサ(214)から基板支持体(108)までの距離を計測させること(506)を含む。そして、その距離が選択されたしきい値を満たす又はその範囲内であるかどうかを判定する。距離が選択されたしきい値を満たす又はその範囲内であるときのロボットジョイント位置を記録する。 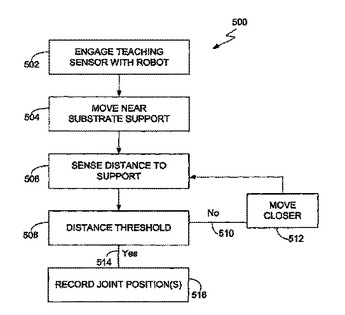 (もっと読む)
(もっと読む)
ロボット制御装置
【課題】作業者が意図しなくても、非常停止回路の機能の点検が自動的に行われるようにする。
【解決手段】ロボット13を駆動する駆動モータ43に電力が供給されているときにロボット13の動作領域内に作業者が近づくことを禁止する自動運転モードと、駆動モータ43に電力が供給されているときでも動作領域内に作業者が近づくことを許容する第2の運転モードとを切り換えるための運転モード切換スイッチ31と、駆動モータ43への電力供給路49の遮断と接続とを切り換える電磁接触器51とを備え、電磁接触器51による電力供給路49の遮断によりロボット13を非常停止させることができるロボット制御装置に、さらに非常停止制御手段を設ける。非常停止制御手段は、運転モードの切り換えを検出すると、電磁接触器51に遮断指令を発し、電力供給路49が遮断されたか否かを自動的に確認する。
(もっと読む)
ロボット教示装置及び方法
【課題】 ロボットの教示の際のアーム同士の特異姿勢の発生を回避する。
【解決手段】 複数のアーム、関節及び駆動源を備えるマニピュレータ装置10と走行装置20とを備えるロボット1の教示装置30において、教示点入力手段37と、入力教示点に基づく複数の移動目標位置T1ごとにマニピュレータ装置の先端部14を位置決めする際に、第二の関節13bが屈曲状態を維持した状態での走行装置の走行方向及び走行距離を求める走行距離算出手段と、当該求められた走行方向及び走行距離を反映させてロボットの制御データを生成するデータ生成手段とを備えている。
(もっと読む)
走行式作業用ロボット
【課題】常に部屋の大きさに応じた作業時間を設定して自律走行作業を実行し、大きさの異なる各種部屋に対して柔軟に対処する。
【解決手段】手動掃除時には手動操作用吸引機構が取り付けられ、自動掃除時には自動用吸引機構が取り付けられ、車輪で走行するロボット本体を使用し、ある部屋においてロボット本体を手動操作して掃除を行い、そのときの手動掃除時間を計測して記憶し、その後、その部屋を自動掃除する時には記憶してある手動掃除時間に基づいて自動掃除時間を求める。そして、ロボット本体は設定された自律掃除時間に基づいて部屋内を自律走行しつつ掃除を実行する。
(もっと読む)
ロボット制御装置およびロボット制御方法
【課題】ロボットの各軸値による教示に対してもロボットの位置決めを精度高く制御することができるロボット制御装置を提供する。
【解決手段】制御部11は、入力部13によって入力された教示データがロボット20の各駆動軸の回転量を示す各軸値のとき、その各軸値を順変換して、直交座標系におけるロボット20のアーム先端の位置およびロボット20の姿勢を示す位置姿勢値である変換指令値を求める。次にロボット20の固有の誤差に基づいて、求めた変換指令値を補正する。さらに補正した変換指令値を、各軸値に逆変換し、逆変換した各軸値をロボット20のアクチュエータ21に指示する。ロボット20の固有の誤差は、たとえばたわみ、加工誤差、および組立誤差などに基づく機構誤差、据付誤差、ならびに各軸原点誤差である。
(もっと読む)
ロボット装置及びその行動制御方法
【課題】状況に応じて適切な動作を発現することができるロボット装置及びその行動制御方法を提供する。
【解決手段】CCDカメラ41及びマイクロホン42のセンサを用いて人物認識器44により動作主体を認識すると共に状況認識器43により状況を認識し、見まねを通じて動作獲得器45により獲得した動作を動作主体及び状況と結び付けて記憶装置46に記憶する。そして、動作発現装置47は、記憶装置46から動作主体及び状況に応じた動作を出力し、アクチュエータ48を制御する。
(もっと読む)
仕上げ加工装置
【課題】 バリ取り動作の無駄を少なくし、かつ削りすぎをも防止できる仕上げ加工装置を提供する。
【解決手段】 被加工ワークのバリ取り表面に対して、力制御を用いて加工ツールを押し付けて、該表面を倣い、表面形状の位置データを求める(S1)。又、ロボットの撓みによる誤差をこの位置データに対して補正する(S2)。得られた位置データとCADから得られたバリ取り表面形状の目標形状とを比較する(S6,S10)。表面形状の法線方向のずれを求める(S7,S11)。ずれの開始位置(S8)と終了位置及びそのずれの大きさによって、バリの発生開始位置と終了位置、その高さを求める(S14)。バリの終了位置と開始位置を結ぶパスとバリを除去する切削パスからなる加工プログラムを作成し、実行する(S16,S17)。バリ位置を求めそのバリ位置まで移動してそのバリを除去するので、効率よくバリ取りができる。
(もっと読む)
触覚センサを有するロボットの教育
【課題】作業環境内で正確に仕事を行うために、ロボットを教育および/または較正するために有益な方法および装置を提供する。
【解決手段】本発明は、ロボット12に連結して作動し、ロボット12の作業環境内の1つ以上の所望位置に位置付けられる1つ以上の触覚センサデバイス38を備える。本発明の1つの構成によれば、作業環境内にタッチ感応面(タッチ感応ゾーン)を設け、このタッチ感応面を対象物に接触させ、前記タッチ感応面に対する接触位置を示す信号を発生させ、発生した前記信号を含む情報を用いて、前記作業環境内の接触位置をロボット12に教える、各工程を含むことを特徴とする。  (もっと読む)
(もっと読む)
自律走行監視装置およびプログラム
【課題】日光の照射および気温の変動などの影響を受けず、不審者を正確に検出することができる自律走行監視装置を提供することを目的としている。
【解決手段】監視装置の本体1と、制御手段5と、本体1を走行経路に沿って移動走行させる走行手段7と、走行中の位置を認識し走行経路を記憶する走行位置認識手段4と、障害物の有無および障害物までの距離を検知する障害物検知手段2と、走行経路上の特定の位置を記憶する特定位置記憶手段6と、人の存在を検出する人感手段3とを有し、制御手段5は、特定位置記憶手段6に記憶される場所で本体1を停止して人感手段3を作動させ、障害物検知手段2と併用で人の存在を検出するため、日光の照射や温度の変化などの影響を受けず、不審者を正確に検出することができる。
(もっと読む)
自律走行ロボット
【課題】作業領域別に異なる作業内容が指示でき、1つの作業領域に複数の作業内容が指示でき、しかも、作業内容を指定して所定の作業位置へ自律走行ができる。
【解決手段】赤外線信号を赤外線受信器4が受信すると、受信信号を解析し、走行コマンドであることを認識すると、走行コマンドに応じた走行制御を行う。そして、自己位置計測手段が逐次自己位置を計測する。登録コマンドが作業位置の登録コマンドであることを判断すると、自己位置計測手段が取得した現在の自己位置を作業位置情報として位置情報記憶手段により記憶部へ記憶する。また、作業内容の登録コマンドを受信したことを認識すると、登録コマンドに該当する作業内容を作業内容記憶手段により記憶部に記憶する。記憶部に登録した作業内容を選択すると、この選択した作業内容に対応した作業位置情報に基づいて所定の位置に案内し、この位置にて登録した作業内容を実行する。
(もっと読む)
1 - 20 / 20
[ Back to top ]