
Fターム[3D034BD03]の内容
操向リンク系及び4WS (6,986) | 操舵リンク機構の検出、制御 (426) | 検出(入力信号) (254) | 操舵の状況 (137)
Fターム[3D034BD03]に分類される特許
1 - 20 / 137
インホイールモータ駆動車輪の転舵装置
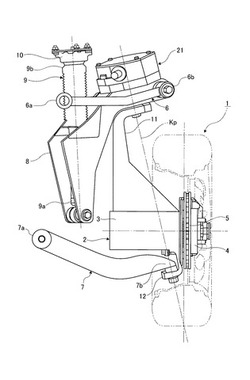
【課題】インホイールモータ駆動車輪の大転舵角を容易にする。
【解決手段】インホイールモータユニット2により駆動される車輪1の懸架は、アッパーアーム6と、ロアアーム7と、サードリンク8と、ショックアブソーバ9とによりユニット2のケース4を介して行う。アーム6,7の車幅方向内側基端6a,7aを車体に上下方向揺動可能に支持する。アーム6の遊端6bは、リンク8の上端に上下方向揺動可能に枢支し、リンク8の下端は、ショックアブソーバ9のピストンロッド9aに揺動可能に枢支する。ケース4の上側固定座11をリンク8に対し又、ケース4の下側固定座12をロアアーム7の遊端7bに対しキングピン軸線Kpの周りに揺動し得るよう取り付ける。車輪1および駆動ユニット2をキングピン軸線Kp周りに転舵させるための転舵機構21を、キングピン軸線Kp上であって車輪1よりも上方箇所に配置し、サードリンク8に取着して設ける。
(もっと読む)
操舵装置

【課題】簡易且つ適切に旋回モードを移行させる。
【解決手段】操舵装置において、転舵機構は、前二輪および後二輪を有する車両10における前二輪および後二輪の各々をステアリング32の操舵に基づいて転舵する。駆動機構は、前二輪および後二輪の各々を個別に駆動する。転舵機構および駆動機構は、ステアリング32の操舵量が増加する過程において、前二輪を同位相に転舵する通常旋回モードから、前二輪を同位相に転舵するとともに後二輪の旋回外輪に前進方向の駆動力を与え後二輪の旋回内輪に後進方向への駆動力を与える小回り旋回モードを介して、後二輪を逆位相に転舵する信地旋回モードに移行させる。転舵機構は、信地旋回モードにおいて、前二輪の旋回内輪を直進方向に戻すよう転舵する。駆動機構は、信地旋回モードにおいて、前二輪の旋回内輪に後進方向の駆動力を与える。
(もっと読む)
苗移植機
【課題】メカロックを発生させることなく、旋回時により確実に苗植付部を上昇させることのできる苗移植機を提供すること。
【解決手段】苗移植機1に、走行車体2に設けられて走行車体2を操舵するハンドル31と、走行車体2の後部に配設されると共に、苗を圃場に植え付ける苗植付部40と、苗植付部40を上昇させることができる苗植付部上昇機構50と、ハンドル31を操舵することにより回動するステアリングアーム60と、ステアリングアーム60の回動に連動し、苗植付部上昇機構50を作動させることができるオートリフト作動アーム70と、伸縮性を有してステアリングアーム60とオートリフト作動アーム70とを連結することにより、双方の距離が変化可能な状態でステアリングアーム60の回動をオートリフト作動アーム70に伝達する連結スプリング75とを備える。
(もっと読む)
ステアバイワイヤ式操舵装置
【課題】 トー角制御用モータの小型化を図り消費電力の増加を抑え、また車両の停止時に、トー角を制御するとき運転者に違和感を与えないステアバイワイヤ式操舵装置を提供する。
【解決手段】 ステアリング制御手段8aは、車両の停車時に、トー角を変える指令信号を出力する場合にトー角を変える回転分割軸6B側の操舵輪3を、この操舵輪3が接地する地面に対して方向が変化しないように、トー角調整用モータ13と転舵用モータ11とを協調して制御する協調制御部8adを有する。
(もっと読む)
自走車両
【課題】操縦操作に基づいて制御量を生成する制御ユニットと、キャスタ輪と、制御指令により互いに独立して駆動制御される第1駆動部及び第2駆動部と、第1駆動部によって走行駆動される左駆動輪及び第2駆動部によって走行駆動される右駆動輪とを備えた自走車両において熟練を要せずに傾斜面を駆動走行しながら自在に横切ることできること。
【解決手段】傾斜横切り走行時に発生する目標走行と実走行との走行方向ずれを、車両の傾斜度に基づいて、解消するようにキャスタ輪の操向角を制御する。
(もっと読む)
後輪トー角制御装置
【課題】直進走行時であっても外乱に対する直進走行性を有効に高めることのできる車両挙動制御を提供する。
【解決手段】電動パワーステアリング装置を備え、後輪5l、5rのトー角可変制御される後輪トー角可変式の自動車Vに設けられ、後輪のトー角の制御に供される後輪トー角制御装置において、ヨーレートを検出するヨーレートセンサと、横加速度を検出する横加速度センサとを備え、検出されたヨーレートと横加速度とに基づいて、外力Fpの働く位置が車体重心CGよりも前方である場合、後輪5のトー角をトーイン側に設定し、外力Fpの働く位置が車体重心CGよりも後方である場合、後輪5のトー角をトーアウト側に設定する。
(もっと読む)
車両用操舵装置
【課題】旋回性に優れ且つ車両姿勢が安定した車両用操舵装置を提供すること。
【解決手段】車両の幅方向Xに延びる第1の被動ラック9Aと第2の被動ラック9Bに、共通の駆動ピニオン10が噛み合う。トレッド幅変更アクチュエータ11が駆動ピニオン10を駆動すると、第1および第1の被動ラック9A,9Bが互いに反対方向に移動する。第1および第2の転舵輪3A,3Bをそれぞれ転舵する第1および第2の転舵アクチュエータ4A,4Bが、それぞれ、第1の被動ラック9Aおよび第2の被動ラック9Bと同行移動する。転舵角センサにて検出された転舵角等に応じて、トレッド幅変更アクチュエータ11を駆動制御し、トレッド幅WTを変更する。
(もっと読む)
車両用制御装置
【課題】車輪のキャンバ角を調整するキャンバ角調整装置を備えた車両に用いられる車両用制御装置に関し、キャンバ角の変更に伴う車両の挙動特性の変化に関する指標値を精度よく算出し得る車両用制御装置を提供する。
【解決手段】車両用制御装置100は、車両の状態に応じてキャンバ角調整装置44を制御し、車両の後輪のキャンバ角を調整する。車両用制御装置100は、ヨーレートセンサ装置81で検出されたヨーレートYを、ステアリングセンサ装置63Aで検出されたステア角Sで除算し、単位ヨーレートゲインを算出する。車両用制御装置100は、ステア角変化量SVが0である対象基準時に基づいて、算出対象期間TPを特定し、算出対象期間TP内の単位ヨーレートゲインに基づく期間内平均値を算出する。
(もっと読む)
ステアバイワイヤ式操舵装置
【課題】旋回時に内外輪に作用するコーナリング力が略均等になるようにトー角を調整できるステアバイワイヤ式転舵装置を提供する。
【解決手段】転舵用モータ6の回転を転舵軸10に伝える転舵動力伝達機構18と、トー角調整用モータ7の回転でトー角を調整するトー角調整動力伝達機構30とを備える。モータ6,7の失陥時に、各モータ6,7の動力伝達経路を切り換えて転舵可能にする切換機構17と、各モータ6,7に転舵角およびトー角の指令信号をそれぞれ与えるステアリング制御手段とを設ける。ステアリング制御手段は、車速とヨーレイトに応じてトー角調整を連続的に行わせるトー角調整制御部を有する。
(もっと読む)
フォークリフト用ステアリング装置
【課題】左右独立操舵可能でありながら、一つの転舵用モータが故障した場合でも操舵不能とならないフェールセーフ機構を有するフォークリフト用ステアリング装置を提供することを目的とする。
【解決手段】車両の操舵を行なう操舵機構と、操舵機構とは機械的に接続されていない転舵輪を転舵する複数の転舵機構と、転舵機構は電動モータを動力源とする転舵用アクチュエータを個別に備え、転舵輪を転舵するステアリング装置に於いて、転舵機構は各々異なった操舵角で独立に転舵輪を転舵できるように構成されており、且つ転舵用アクチュエータに異常が発生した場合、一方の転舵用アクチュエータの駆動力を他方の転舵用アクチュエータに機械的に伝達するフェールセーフ機構を具備することを特徴とする。
(もっと読む)
ステアバイワイヤ式操舵装置
【課題】 転舵用モータが失陥しても転舵を行うことができ、かつトー角調整用モータが失陥してもトー角調整機構を固定して安全に走行でき、しかもトー角調整用モータの容量を小さくでき構成がコンパクトなステアバイワイヤ式操舵装置を提供する。
【解決手段】 転舵用モータ6の回転を転舵軸10に伝える転舵動力伝達機構18と、トー角調整用モータ7の回転でトー角を調整するトー角調整動力伝達機構30と、モータ6,7の失陥時に、各モータ6,7の動力伝達経路を切り換えて転舵可能にする切換機構17とを備える。転舵軸10は、ねじ結合部10Cで結合した非回転分割軸10Aと回転分割軸10Bとでなり、両分割軸10A,10Bを一体に軸方向移動させて転舵する。回転分割軸10Bを回転させ、ねじ結合部10Cの螺合長さを調整してトー角を調整する。回転分割軸10Bは、スラスト軸受とボールジョイントを介してタイロッドに連結する。
(もっと読む)
車両用制御装置
【課題】操舵部材を操作して車両を旋回させるときに、運転者が違和感を覚えたり、操舵部材の切増しが必要になったりすることがないようにする。
【解決手段】車両のボディと、複数の車輪と、所定の車輪に配設され、車輪にキャンバを付与するためのキャンバ可変機構と、所定の車輪にキャンバが付与されているかどうかを判断するキャンバ付与状態判断処理手段と、所定の車輪にキャンバが付与されていると判断された場合に、操舵部材における操舵特性を、所定の車輪に付与されたキャンバに応じて変更する操舵特性変更処理手段とを有する。所定の車輪にキャンバが付与されている場合に、操舵特性がキャンバに応じて変更されるので、車両がアンダーステアの挙動を示すのを防止することができる。
(もっと読む)
車両用制御装置
【課題】高グリップ性と低燃費との両立を図ることができる制御装置及び車両を提供すること。
【解決手段】車輪2のキャンバー角がネガティブキャンバーに調整されると、第1トレッド21の接地圧が増加されると共に、第2トレッド22の接地圧が減少される。これにより、高グリップ性が発揮される。一方、車輪2のキャンバー角がポジティブキャンバーに調整されると、第1トレッド21の接地圧が減少されると共に、第2トレッド22の接地圧が増加される。これにより、低転がり抵抗となり、省燃費が達成される。このように、車輪2のキャンバー角を調整することで、高グリップ性と省燃費との背反する性能の両立を図ることができる。
(もっと読む)
車両用制御装置
【課題】高グリップ性と低燃費との両立を図ることができる制御装置及び車両を提供すること。
【解決手段】車輪2のキャンバー角がネガティブキャンバーに調整されると、第1トレッド21の接地圧が増加されると共に、第2トレッド22の接地圧が減少される。これにより、高グリップ性が発揮される。一方、車輪2のキャンバー角がポジティブキャンバーに調整されると、第1トレッド21の接地圧が減少されると共に、第2トレッド22の接地圧が増加される。これにより、低転がり抵抗となり、省燃費が達成される。このように、車輪2のキャンバー角を調整することで、高グリップ性と省燃費との背反する性能の両立を図ることができる。
(もっと読む)
ステアバイワイヤ式操舵装置
【課題】 転舵用モータが失陥してもトー角調整用モータを転舵の駆動源に転用して転舵を行うことができ、かつトー角調整用モータが失陥してもトー角調整機構を固定して安全に走行でき、構成がコンパクトなステアバイワイヤ式操舵装置を提供する。
【解決手段】 転舵用モータ6と、その回転を転舵軸10に伝える転舵動力伝達機構18と、トー角調整用モータ7と、その回転によりトー角を調整させるトー角調整動力伝達機構30とを備える。転舵用モータ6が失陥したときに、転舵用モータ6に代えてトー角調整用モータ7の回転を転舵動力伝達機構18に伝えて転舵可能とし、トー角調整用モータ7が失陥したときに、転舵用モータ6による転舵のみ行わせる切換機構17を設ける。転舵用モータ6およびトー角調整用モータ7のいずれか一方、または両方に、中空モータを用いる。
(もっと読む)
ステアバイワイヤ式操舵装置
【課題】 転舵用モータが失陥してもトー角調整用モータを転舵の駆動源に転用して転舵を行うことができ、かつトー角調整用モータが失陥してもトー角調整機構を固定して安全に走行でき、構成がコンパクトなステアバイワイヤ式操舵装置を提供する。
【解決手段】 転舵用モータ6と、その回転を転舵軸10に伝える転舵動力伝達機構18と、トー角調整用モータ7と、その回転によりトー角を調整させるトー角調整動力伝達機構30とを備える。転舵用モータ6が失陥したときに、転舵用モータ6に代えてトー角調整用モータ7の回転を転舵動力伝達機構18に伝えて転舵可能とし、トー角調整用モータ7が失陥したときに、転舵用モータ6による転舵のみ行わせる切換機構17を設ける。切換機構17は、同軸心上に軸方向移動自在に配置された転舵用中間軸21とトー角調整用中間軸35とを、直動アクチュエータ47で一緒に軸方向に移動させることで切換動作を行う。
(もっと読む)
編成搬送台車設備
【課題】本発明は、マスタ台車に自動的に台車群の台車の編成を設定でき、常に正常な編成状態で大型の運搬物を搬送できる編成搬送台車設備を提供することを目的とする。
【解決手段】各台車MC,SCに、通信ケーブル31を接続する4つの接続コネクタ32と、通信ケーブル31が接続された接続コネクタ32を検出し、検出された接続コネクタ32によって台車群を編成するマスタ台車MCとスレーブ台車SCの配置状態を判断する編成状態検出部M20E,S20Eを設ける。この構成によれば、台車群を編成するマスタ台車MCとスレーブ台車SCの配置状態が自動的に判断されることにより、作業者が編成の毎に台車の編成状態を入力する必要がなくなり作業者の負担を回避でき、また入力ミスにより、台車群を一体で換向されるときに各台車MC,SCの換向の向きが異なり、接触したり、通信ケーブル31が切断する恐れを回避できる。
(もっと読む)
フロントアクスル機構
【課題】誤検出を防止して、前輪の切れ角の検出精度を向上させることができるフロントアクスル機構を提供する。
【解決手段】アクスルケースと、キングピン70を回動自在に支持するフロントギヤケース30と、フロントギヤケース30の下部に回動可能に支持され、前輪を回動自在に支持するフロントギヤボックス40と、前輪の切れ角を検出する切れ角検出装置100と、を備えたフロントアクスル機構3であって、切れ角検出装置100は、フロントギヤケース30の上部を覆うカバー部材110と、カバー部材110に回動可能に支持され、このカバー部材110内から外方へ突出する回動軸120と、フロントギヤボックス40と回動軸120の突出端部との間に配置され、これらを連動連結するセンサアーム130と、フロントギヤケース30内に配置され、回動軸120の回動角度を検出するポテンショメータ140と、を具備した。
(もっと読む)
操舵制御車両
【課題】操舵制御手段が制御不能となった場合に車両挙動をより安定化させる。
【解決手段】自動車Vは、左右後輪3rに設けられた後輪トー角可変機構6と、左右前輪3fと左右後輪3rに設けられた減衰力可変ダンパ4およびスタビライザ8とを有する。ECU20は、故障検出部34によって左右両方の後輪トー角可変機構6に故障が検出された場合(ステップS5:Yes)、前輪3のダンパ4rの目標減衰力を大きく補正するとともに(ステップS6)、フロントスタビライザ8fの目標ロール剛性を高く補正する(ステップS7)。また、ECU20は、故障検出部34によって左右どちらかの後輪トー角可変機構6に故障が検出された場合(ステップS5:No)、故障した側の後輪3rの目標減衰力を小さく設定するとともに(ステップS11,S13)、フロントスタビライザ8fの目標ロール剛性を高く補正する(ステップS7)。
(もっと読む)
車両の後輪操舵制御装置
【課題】指示トー角への実トー角の追従性を向上させる車両の後輪操舵制御装置を提供する。
【解決手段】車両の左右後輪の指示トー角を設定する指示トー角設定手段119と、車両の運動状態量を検出する状態量検出手段17と、を備え、指示トー角と検出された実トー角との偏差に基づき操作量を算出し、この操作量に基づいて車両の左右後輪に設けられたアクチュエータ11を作動させることによってトー角を変化させる後輪操舵制御装置である。本装置は、偏差を積分する積分手段124と、前記アクチュエータの制御特性に起因した前記指示トー角、前記実トー角、もしくは前記偏差の変動に応じて前記積分手段の偏差の積分量を減少させる指令を行うリセット指令手段120とを備える構成とする。
(もっと読む)
1 - 20 / 137
[ Back to top ]