
Fターム[3D232CC08]の内容
走行状態に応じる操向制御 (73,124) | 制御目的 (7,801) | 操舵性・安定性の向上 (4,043) | 操舵感覚 (1,268)
Fターム[3D232CC08]の下位に属するFターム
Fターム[3D232CC08]に分類される特許
1 - 20 / 1,220
車両のパワーステアリング制御装置
操向制御システム及びその方法
車両姿勢制御装置
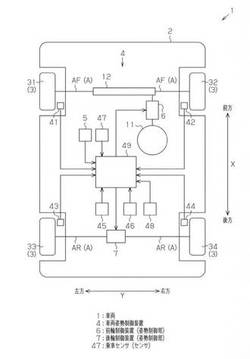
【課題】所定の乗車位置における乗り心地の向上に貢献する車両姿勢制御装置を提供する。
【解決手段】車両姿勢制御装置4は、車両1の姿勢を制御する前輪制御装置6および後輪制御装置7を備える。前輪制御装置6および後輪制御装置7の少なくとも一方は、車両1に乗っている乗員の数である乗員数および車両1に乗っている乗員の位置である乗車位置を検出する乗車センサ47の出力に基づいて車両1の姿勢を制御する。
(もっと読む)
車両操舵制御システム

【課題】電力不足の状態が発生した場合に、システム重要度に応じた動作制御を行うことのできる技術を提供する。
【解決手段】EPS−ECU50は、VGRS−ECU20に対して、要求信号を送信する。VGRS−ECU20は、要求信号を受信すると、VGRSアクチュエータの制御を決定するとともに、ARSアクチュエータの制御も決定する。要求信号がアクチュエータの動作停止を要求する場合、VGRS−ECU20は、VGRSアクチュエータおよびARSアクチュエータを、それぞれ動作停止するように制御する。
(もっと読む)
車両用操舵装置
【課題】転舵輪側からタイロッドに入力する高周波振動を新規な方法で推定して操作部材に伝達することができ、操舵感が向上する車両用操舵装置を提供する。
【解決手段】ラックハウジング18に加速度センサ30が取り付けられている。FFT処理部52Aは、加速度センサ30の出力信号を、時間領域信号から周波数領域信号に変換する。逆入力振動成分抽出部52Bは、FFT処理部52Aによって得られた周波数領域信号から、周波数fが所定範囲内(fL≦f≦fH(fH>fL))にあり、かつパワー密度ρが所定範囲内(ρL≦f≦ρH(ρH>ρL))にある信号を抽出する。IFFT処理部52Cは、逆入力振動成分抽出部52Bによって抽出された周波数領域信号を時間領域信号(逆入力振動推定値)に変換する。
(もっと読む)
電動パワーステアリング装置
【課題】加速度センサをタイロッドに比べて動きの小さいラックハウジングに取り付けることができるとともに、加速度センサの出力信号からタイロッドの加速度を推定することができるようになる電動パワーステアリング装置を提供する。
【解決手段】ラックハウジングに加速度センサ30が取り付けられている。加速度センサ30はラックハウジング加速度を検出する。位相進み補償処理部52Aは、タイロッド加速度に対するラックハウジング加速度の位相遅れ分だけ、ラックハウジング加速度の位相を進めるための位相進み補償処理を行なう。ゲイン補正処理部52Bは、タイロッド加速度に対するラックハウジング加速度のゲイン減少分だけ、ラックハウジング加速度のゲインを増加させるためのゲイン補正処理を行なう。
(もっと読む)
油圧式パワーステアリング装置
【課題】切り込み状態から操舵部材が中立位置に向かって戻される場合に、切り込み方向の操舵補助力が不足するのを抑制できる油圧式パワーステアリング装置を提供する。
【解決手段】ダンピング制御部62は、検出操舵トルクThの方向が切り込み方向でありかつその大きさ(絶対値)が第1の閾値以上であり、操舵角速度ωhの方向が切り戻し方向でありかつその大きさ(絶対値)が第2の閾値以上のときに、操舵角速度ωhに応じたダンピングトルク指令値TD*を設定する。加算部63は、基本アシストトルク指令値設定部61によって設定される基本アシストトルク指令値TAO*に、ダンピング制御部62によって生成されるダンピングトルク指令値TD*を加算する。
(もっと読む)
車両用操舵装置及び荷役車両
【課題】車両旋回時、特にハンドルの戻し時に運転者の操舵負担を低減することができる車両用操舵装置及び荷役車両を提供する。
【解決手段】操舵部材10の操舵角を検出する操舵角検出部13と、操舵部材10に操舵反力を付与する反力アクチュエータ15と、車体のヨー角を検出するヨー角検出部33と、少なくとも操舵角検出部13によって検出された操舵角の関数として操舵反力を設定し、その設定された操舵反力を実現するように前記反力アクチュエータ15を制御する反力アクチュエータ制御部16とを備え、反力アクチュエータ制御部16は、ヨー角検出部33によって検出された車体のヨー角の変化に基づいて車体の旋回量を観測し、観測された旋回量が基準角以上であれば、前記操舵部材に付与する操舵反力を、通常よりも増大させる。
(もっと読む)
電動パワーステアリング装置
【課題】 自動停止条件の成立後に操舵トルクが増加する場合であっても、操舵トルクの急変を抑制可能な電動パワーステアリング装置を提供する。
【解決手段】 電動パワーステアリング装置10は、ステアリング系20の操舵トルクを検出する操舵トルクセンサ41と、ステアリング系20に補助トルクを与える電動モータ43と、操舵トルクに基づく目標電流値で電動モータ43のモータ電流値を制御するモータ電流制御部42と、を備える。モータ電流制御部42は、自動停止条件が成立するとエンジンを停止させるアイドリングストップ制御部100の自動停止条件が成立することに起因して、目標電流値を目標電流上限値以下に設定する。目標電流上限値は、目標電流値を目標電流上限値以下に設定することを開始した時Tsの目標電流値Imsと関連する。
(もっと読む)
車両用前後輪転舵制御装置
【課題】ステアリング操作による前後輪自動追従制御時、ステア角とヨーレートの比例関係を保つことで、ドライバーに与える操作違和感を軽減すること。
【解決手段】車両用前後輪転舵制御装置は、前輪11,11及び後輪12,12がステアリング操作とは独立して転舵可能である4WS車1において、軌跡演算機21及び後輪舵角演算機22と、前輪舵角演算機23と、を備える。軌跡演算機21及び後輪舵角演算機22は、4WS車1の進行方向側に設定した車両前部定点αの軌跡を、4WS車1の進行方向とは反対側に設定した車両後部定点βがトレースするように、後輪転舵角ψを制御する。前輪舵角演算機23は、ステアリング操作による操舵角Θに基づく前輪転舵角(k1Θ)を、前後輪転舵角差を減じるように、後輪転舵角ψに応じて補正制御する。
(もっと読む)
車両用走行支援装置
【課題】 車線逸脱の抑制とドライバに与える違和感の軽減との両立を図ることができる車両用走行支援装置を提供する。
【解決手段】 走行路上の自車前方に、車速Vに応じた前方注視点距離Lsだけ離れた目標走行位置Pを設定し、自車が設定した目標走行位置Pを走行するように自車の走行を支援する車両用走行支援装置において、走行路に対する自車の向きを判定する姿勢判定部14aと、自車が走行路外側を向いている場合、自車の向きが走行路と平行である場合よりも車速Vに応じた前方注視点距離のベース値Ls_baseを短縮した前方注視点距離Lsを設定する前方注視点距離設定部14と、を備えた。
(もっと読む)
車線維持支援装置
【課題】 車線維持支援制御時にドライバが操舵力を緩めたときのドライバの違和感を抑制する車線維持支援装置を提供すること。
【解決手段】 走行車線に対する自車両の横変位に応じて操舵反力アクチュエータにより発生させる操舵反力を演算し、付加反力指令値の方向と操舵の方向との比較に基づき、横変位と操舵速度に応じて付加操舵反力指令値を減少させる補正値を演算するようにした。
(もっと読む)
電動機の制御装置
【課題】非干渉制御を行っても、振動をより低減させることができる電動機の制御装置を提供する。
【解決手段】本制御装置では、回転子角速度ω[rad/s]の振動周波数におけるゲインが小さくなるように、回転子角速度ω[rad/s]をゲイン調整後角速度ω’[rad/s]に変換するゲイン調整部105を備える。非干渉制御を行うために、非干渉d軸電圧指令値Vd[V]および非干渉q軸電圧指令値Vq[V]を求める非干渉制御部104を備える。非干渉制御部104は、ゲイン調整後角速度ω’[rad/s]、d軸PI出力電圧指令値Vd’[V]およびq軸PI出力電圧指令値Vq’[V]に基づいて求める。更に、非干渉d軸電圧指令値Vd[V]と非干渉q軸電圧指令値Vq[V]から変換された三相電圧指令値Vu、Vv、Vw[V]に基づいて、インバータ2を制御するPWM信号PWMを生成するPWM変換部109とを備える。
(もっと読む)
電動パワーステアリング装置
【課題】簡素な構成にて効果的に車両の偏向が抑えられ、快適な操舵フィーリングを得ることができる電動パワーステアリング装置を提供することにある。
【解決手段】トルクセンサから検出された操舵トルクτの形状を生成する操舵トルク波形形状補正手段(32)によって、操舵トルクτの波形形状を運転状態に最適な波形形状の補正操舵トルクTcに補正する。そして、その補正操舵トルクTcと、操舵トルクτの乗算により算出されたリードプル補正量Iip*の値により、アシスト力を増減する。
(もっと読む)
パワーステアリング装置
【課題】路面からの逆入力により発生する操舵機構の振動をより精度良く検出することができるパワーステアリング装置を提供する。
【解決手段】入力軸(第3コラムシャフト)に設けられ、入力軸に生じる歪振動を検出する第1歪センサと、出力軸(ピニオンシャフト)に設けられ、出力軸に生じる歪振動を検出する第2歪センサと、第2歪センサの出力信号である第2歪振動V2の位相が第1歪センサの出力信号である第1歪振動V1よりも進んでいるか否かを判断する位相判断回路84と、位相判断回路84が、第2歪振動V2の位相が第1歪振動V1の位相よりも進んでいると判断するとき、路面から操舵機構に対して作用する逆入力トルクが作用していると判断し、逆入力トルクが低減する方向に電動モータ60の駆動電流を補正する駆動電流補正回路(強化ゲイン設定回路824)と、を有する。
(もっと読む)
電動パワーステアリング装置
【課題】ヒステリシスを考慮して電動モータに供給する電流量を制御することで、操舵フィーリングの向上および安全性の向上を図ることができる技術を提供する。
【解決手段】ステアリングホイールの操舵トルクに応じた値を検出するトルク検出部210と、実際の操舵トルクとトルク検出部が検出する検出値との間のヒステリシスを考慮してトルク検出部210が検出した検出値を補正するトルク値補正部220と、トルク値補正部220が補正した検出値に基づいて電動モータ110に供給する目標電流を算出する目標電流算出部20と、を備え、トルク値補正部220は、トルク検出部210が検出した検出値に応じた補正量を用いて、操舵トルクが小さい場合にはヒステリシスを小さく、操舵トルクが大きい場合にはヒステリシスを大きくするように補正する。
(もっと読む)
車両用操舵装置及び荷役車両
【課題】操舵角に対する反力特性を適切に設定することにより、運転者の操舵負担を低減することができる車両用操舵装置及び荷役車両を提供する。
【解決手段】操舵部材10の操舵角を検出する操舵角検出部13と、操舵部材10に操舵反力を付与する反力アクチュエータ15と、少なくとも操舵角検出部13によって検出された操舵角の関数として操舵反力を設定し、その設定された操舵反力を実現するように前記反力アクチュエータ15を制御する反力アクチュエータ制御部16とを備え、反力アクチュエータ制御部16は、操舵角検出部13によって検出された操舵角が第1の切替角θh1以下の第1の舵角領域Iにあるか、第1の切替角θh1を超える第2の舵角領域IIにあるかを判定し、操舵角が第1の舵角領域Iにあるときに操舵角の増加に伴って操舵反力を最大値まで立ち上げ、操舵角が第2の舵角領域IIに入ると操舵角の増加に伴って操舵反力が前記最大値から単調に減少するように反力アクチュエータを制御する。
(もっと読む)
車両のパワーステアリング制御装置
【課題】特に、中立位置からのステアリングホイールの切り出しにおいて、ドライバが感じるフリクション感を適切に打ち消して滑らかで良好な操舵フィーリングを実現する。
【解決手段】車速Vと操舵トルクTsを基に基本アシストトルクTbを設定し、ハンドル角の絶対値|θH|が高いほど操舵する方向への基本アシストトルクTbを増大させる方向に補正する第1の補正値ΔT1を設定し、ハンドル角速度の絶対値|dθH/dt|が高いほど操舵する方向への基本アシストトルクTbを減少させる方向に補正する第2の補正値ΔT2を設定し、少なくともステアリングホイールの中立位置からの切り始めにおいて第1の補正値ΔT1と第2の補正値ΔT2との差を第1の補正値ΔT1で補正する方向におけるアシスト補正量ΔTaとして算出し、こうして求めたアシスト補正量ΔTaで基本アシストトルクTbを補正して制御量としてモータ駆動部21に出力する。
(もっと読む)
車両のパワーステアリング制御装置
【課題】パワーステアリングによりダンピング補正を精度良く適切に行って、スッキリとした操舵フィーリングを維持し、たとえ、比較的素早い切り返し操舵時等であってもドライバがしっかりステアリングホイールを握らなくても安定感のある操舵フィーリングを実現する。
【解決手段】車速Vと操舵トルクTsを基に基本アシストトルクTbを設定し、ヨーレートγとハンドル角速度(dθH/dt)とが同符号の場合は、アシスト補正量ΔTaを0とし、ヨーレートγとハンドル角速度(dθH/dt)とが異符号の場合は、ヨーレートの絶対値|γ|に基づいてダンピング補正量Gdを算出してこのダンピング補正量Gdとハンドル角速度(dθH/dt)とに基づいてアシスト補正量ΔTaを算出し、アシスト補正量ΔTaで基本アシストトルクTbを補正してアシストトルクTaとする。
(もっと読む)
車両のパワーステアリング制御装置
【課題】アシストトルクに対する補正量のピークの位相を遅らせることなく、操舵状態の切り替わり時の急激な変化を抑制することができる車両のパワーステアリング装置を提供する。
【解決手段】操舵制御部20は、ドライバによる操舵状態が切り増し状態のときと切り戻し状態のときとで選択的に切り替わる操舵ゲインG0を生成し、当該操舵ゲインG0を無次元数G0’に変換してレートリミット処理を行い、レートリミット処理後の操舵ゲインGを用いて基本アシストトルクTbを補正して最終的なアシストトルクTaを演算する。これにより、基本アシストトルクTbに対するアシスト補正量ΔTaのピークの位相を遅らせることなく、操舵状態の切り替わり時の急激な変化を抑制することができる。
(もっと読む)
1 - 20 / 1,220
[ Back to top ]