
Fターム[3D232GG11]の内容
走行状態に応じる操向制御 (73,124) | 車種 (3,640) | 農業車両 (47)
Fターム[3D232GG11]の下位に属するFターム
Fターム[3D232GG11]に分類される特許
1 - 20 / 25
走行車両
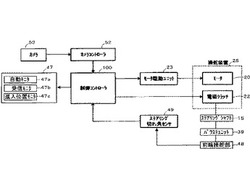
【課題】旋回後の進入位置合わせを行える自動走行制御機能を備えた農業用の走行車両を提供すること。
【解決手段】ステアリングハンドルに連動して正転と逆転をするステアリングシャフト15の切れ角を検出する切れ角センサ49と該シャフト15に回転駆動力を伝達するための正逆転モータ20とモータ20の回転駆動力をシャフト15に伝達するための電磁クラッチ22を有する連動機構を備えた自動操舵装置25とカメラ53で圃場内の遠目標X及び/又は作業軌跡Tを検出してモニタ47に表示可能とし、自動スイッチの「入」操作時時に、前記切れ角センサ49が所定量のシャフト切れ角を検出して車両の旋回が行われたと判断されると、モニタ47で表示される旋回後の遠目標Xの位置情報及び/又は作業軌跡Tの位置情報に基づき自動操舵装置25のモータ20を作動させて圃場内で直進走行の自動操舵を行う制御構成を有する制御装置100を備えた走行車両である。
(もっと読む)
自走車両

【課題】操縦操作に基づいて制御量を生成する制御ユニットと、キャスタ輪と、制御指令により互いに独立して駆動制御される第1駆動部及び第2駆動部と、第1駆動部によって走行駆動される左駆動輪及び第2駆動部によって走行駆動される右駆動輪とを備えた自走車両において熟練を要せずに傾斜面を駆動走行しながら自在に横切ることできること。
【解決手段】傾斜横切り走行時に発生する目標走行と実走行との走行方向ずれを、車両の傾斜度に基づいて、解消するようにキャスタ輪の操向角を制御する。
(もっと読む)
作業車
【課題】農作業等の作業性を向上させることができる作業車を実現する。
【解決手段】電動モータの回転を制御して、ステアリングハンドルの操作量に対応するステアリング装置の入力軸の操作量の比であるステアリングレシオを変更可能な可変レシオモードと、電動モータの回転を制御して、予め設定された設定位置又は設定方向に沿って走行機体を自動操向させる直進モードとを実行可能な制御装置を備えている。
(もっと読む)
乗用型芝刈り車両及びその制御方法
【課題】走行時におけるステアリングのふらつきを抑制することで、予期せぬ旋回を防止して旋回性や直進性を向上させることができる乗用型芝刈り車両及びその制御方法を提供する。
【解決手段】乗用型芝刈り車両1は、ステアリングホイール16の操作角度に応じて回転軸の角度が変更される後輪12と、ステアリングホイール16の操作角度を検出するエンコーダE11と、エンコーダE11の検出結果が過去の一定期間(遊び期間)に亘って予め設定された範囲(遊び範囲)内に収まっている場合には、ステアリングホイール16の操作角度をエンコーダE11の検出結果で示される操作角度に固定して後輪12を制御する制御装置34とを備える。
(もっと読む)
作業車両
【課題】作業車両の傾斜地での直進走行性能を向上できるようにする。
【解決手段】左右の走行駆動輪11・12と、左右の走行駆動輪11・12の前方または後方に配置される補助輪(キャスタ輪13・14)と、前記左右の走行駆動輪11・12をそれぞれ回転駆動する左右一対の電動モータ15・16と、左右の走行駆動輪11・12の回転速度をそれぞれ検出する回転速度検出手段(回転速度センサ17・18)と、進行方向及び車速を設定する操行手段となる旋回レバー21・22と、作業車両に発生するヨーレイトを検出するヨーレイトセンサ25と、前記操行手段より算出された目標ヨーレイトになるように前記左右電動モータ15・16の回転数を変速してヨー制御する制御装置50を備える作業車両において、操行手段で設定した進行方向が設定角度以内の直進走行の場合のみ、ヨー制御を行うようにした。
(もっと読む)
乗用型芝刈り車両及びその制御方法
【課題】ペダルやステアリングの操作状況に応じて生ずる芝の損傷を防止するとともに車両にかかる負担を軽減することができる乗用型芝刈り車両及びその制御方法を提供する。
【解決手段】乗用型芝刈り車両1は、ステアリングホイール16の操作量に応じて回転軸の角度が変更される後輪12を備える車両であって、車両の速度を検出する速度センサ36と、ステアリングホイール16の操作量に基づいて目標とすべき後輪12の回転軸の角度である目標操舵輪角度を算出する目標操舵輪角度算出部38aと、速度センサ36の検出結果に応じて後輪12の回転軸の角度の制限値である操舵輪角度制限値を設定する操舵輪角度制限値設定部38bと、目標操舵輪角度が操舵輪角度制限値を超えている場合には、目標操舵輪角度を操舵輪角度制限値に設定して後輪12を制御するモータ制御部38cとを備える。
(もっと読む)
走行車両自動操舵用駆動装置
【課題】異なる走行車両に対応する汎用性の高い自動操舵駆動装置を提供するとともに、緊急時の手動ハンドル操作を可能にする自動操舵駆動装置を提供すること。
【解決手段】電磁クラッチのオンオフにより中間軸駆動用の正逆転モータを作動制御してステアリングシャフトを自動操舵モードで駆動制御する自動操舵制御手段を設け、例えはクラッチペダルのオン、左又は右のブレーキペダルのオン又は前後進レバーが前進側又は後進側に移動されるなどの何らかの走行車両の挙動操作が行われると、該自動操舵制御手段は正逆転モータによる自動操舵モードを禁止する制御とすることで走行安全性を確保する。
(もっと読む)
移動作業機の操縦制御装置
【課題】乗用型移動作業機の自動操縦を実現し、作業者の負担を軽減することを目的とする。
【解決手段】移動作業機に設置した1つの可動式方向測定装置と、2つの可動式距離測定装置により作業領域の周囲に設置した複数の案内支柱を検出して移動作業機の進路の基準とし、移動作業機の進行に伴って目標とする案内支柱を切り換えながら途切れることなく検出し、移動作業機に内蔵する演算制御装置が正しい進路を進行するよう移動作業機を制御することで、移動作業機の案内支柱の列に沿った前進、転回を自動操縦で行うことを可能とし、前記課題を克服する。
(もっと読む)
車両
【課題】簡易な操作により、超信地旋回を行うことが可能な車両を提供する。
【解決手段】2つの前輪(左前輪21及び右前輪31)と、前記前輪にそれぞれ連結され、前記前輪を操舵する操舵用アクチュエータ(左前輪操舵モータ23及び右前輪操舵モータ33)と、前記操舵用アクチュエータの動作を指示するステアリングホイール62と、ステアリングホイール62の回動角θに基づいて定められる旋回中心Z周りを旋回することが可能な前記前輪の操舵角(δFL及びδFR)をそれぞれ算出し、前記前輪の操舵角が算出された操舵角となるように前記操舵用アクチュエータを動作させるコントローラ100と、を具備した。
(もっと読む)
走行制御装置
【課題】車両が目標ランプに向かって自動的に走行するように制御する走行制御装置を提供する。
【解決手段】走行制御装置において、カメラは、車両走行の目標となる方向に位置する目標ランプを撮像する。画像処理部32は、カメラにより撮像した撮像画像を処理する。走行制御部36は、撮像画像に含まれる目標部画像の位置と車両の初期位置との関係で定まる目標走行ラインを走行するように車両の走行を制御する。ヨー角検出部42は、撮像画像から目標部に対する車両のヨー角を検出する。横偏差算出部50は、撮像画像から目標走行ラインからの横偏差を算出する。走行制御部36は、ヨー角および横偏差にもとづいて車両の走行を制御する。
(もっと読む)
第1および第2操舵部材を含む油圧操舵システム、ならびに油圧操舵システムを含む車両
本発明は、第1操舵部材(10)と、第2操舵部材(50)とを含み、前記第1操舵部材(10)は、第1操舵バルブを含む第1操舵バルブユニット(30)に作動可能に接続されており、優先バルブ(20)が、所望の操舵方向への前記車両(210)の操舵を提供する1つ以上の操舵シリンダー(40)への油圧液の流れを制御し、前記優先バルブ(20)は、前記第2操舵部材(50)による操舵よりも前記第1操舵部材(10)による操舵に優先を与える、車両(210)の油圧操舵システムに関する。 第2操舵バルブ(110)は、比例流量制御バルブ(120)と直列に、機能的に作動可能に設けられ、前記第2操舵バルブ(110)および/または前記比例流量制御バルブ(120)は、少なくとも前記第2操舵部材(50)によって制御される。 (もっと読む)
乗用作業機
【課題】本発明は、旋回時の操作の煩わしさを排除して、旋回に係る操作性を大幅に高めることができる乗用作業機を提供することを課題とする。
【解決手段】乗用作業機としての乗用芝刈り機10は、操舵ハンドル21が所定の角度を超えて転舵されたか否かを検出する舵角センサ31を備え、車速制御レバー28が、予め定めた車速を超えた範囲に設定されたか否かを検出するレバー位置検出センサ29を備え、レバー位置検出センサ29から車速が予め定めた車速を超えた範囲に設定されているとの位置情報および舵角センサ31から舵角が所定の角度を超えた範囲に設定されているとの転舵情報の情報を受けたときにエンジン12の回転速度を絞る減速制御を実施する制御部33が設けられている。
(もっと読む)
作業車
【課題】車速条件を考慮して複数の操舵モードへの移行の可否を判定することにより安全性を高めようとする。
【解決手段】操舵モード選択手段(92)の操作状態に基づいて、前輪操舵モード(FWS)、後輪操舵モード(RWS)、四輪操舵モード(4WS)を備えた作業車において、作業車の車速検出手段(VS)を設け、前記車速検出手段(VS)が所定速度未満の車速を検出し、副変速機構(7)の油圧クラッチ変速部(11)が低速位置あるときに前記後輪操舵モード(RWS)又は四輪操舵モード(4WS)への設定を許可し、前記後輪操舵モード(RWS)又は四輪操舵モード(4WS)の設定中、車速検出手段(VS)が所定速度以上の車速を検出するとき、前記副変速機構(7)の油圧クラッチ変速部(11)の低速位置から高速位置への変速を牽制する。
(もっと読む)
動的限定的ステアリングフィードバック
【課題】 運転制御が容易な芝維持車、そのための動的限定的ステアリングフィードバックシステム、および芝維持車の制御方法を提供する。
【解決手段】 芝維持車用の動的限定的フィードバックシステムが、芝維持車のステアリング角および/または対地速度を検出する入力装置を含む。入力装置は、芝維持車のステアリング角および/または対地速度に相互関連する入力信号を送信する。本システムはまた、芝維持車のステアリング抵抗、旋回比、速度制限、対地速度および/または旋回角制限に影響を及ぼす出力装置を含む。本システムはさらに、入力信号を受信し、かつ入力信号に基づいて出力装置に制御信号を出力するコントローラを含み、入力信号に基づいて、芝維持車のステアリング抵抗、旋回比、速度制限、対地速度および/または旋回角制限を変化させる。芝維持車の制御方法も開示される。
(もっと読む)
電動パワーステアリング装置
【課題】経年変化によるトルクセンサの中点位置のズレを、出荷後であっても自動的に補正することで操舵フィーリングの悪化を抑制し、市場クレームに至る可能性を低減する。
【解決手段】トルクセンサに予め設定された設定中立位置信号を記憶保持する記憶手段と、トルクセンサで検出される現在中立位置信号のオフセット補正値を演算する補正値演算値手段と、現在中立位置信号の補正の可否を判定する補正可否判定手段とを備え、補正可否判定手段の判定に基づいて現在中立位置信号をオフセット補正値で補正する。
(もっと読む)
自動車両航法システムのための部分手動制御状態
移動中の車両を自動制御するための方法および装置を開示する。警報状態が検出され、その警報状態に応答して車両の現在の曲率半径が維持される。曲率半径は、センサから受け取ったデータを使用することによって計算することができる。警報状態は、不安定になりつつある車両または自動航法システムの誤動作によるものである可能性がある。車両は、オペレータ制御入力に応答して手動制御状態に置かれる。  (もっと読む)
(もっと読む)
作業車
【課題】隣接耕合せの作業性を向上することができ、耕耘作業の作業性を向上することができる作業車を実現する。
【解決手段】走行車体1の向きを検出する向きセンサ39,40と、走行車体1に右又は左の旋回指令を入力する旋回指令入力部37と、旋回指令入力部37によって旋回指令が入力されると、向きセンサ39,40の検出結果に基づいて、旋回指令入力部37により入力された右又は左に前輪3を操向操作し予め設定された旋回目標角度に走行車体1を自動旋回させる自動旋回制御手段と、旋回目標角度を変更調節可能な旋回目標角度調節具42とを備えて、作業車を構成する。
(もっと読む)
作業車の前輪増速機構
【課題】作業者が変速装置、最高速設定部材、エンジン目標回転数を設定し、走行時に前輪増速状態になっているか否かを認識することができる作業車の前輪増速機構を提供する。
【解決手段】変速操作部材である主変速レバー42・副変速レバー19、最高速設定ダイヤル40から目標車速を演算し、目標車速が設定速度以上になった場合に、前輪増速規制状態とする作業車の前輪増速機構60であって、前輪増速作動状態又は前輪増速規制状態を作業者に報知する報知手段62を有する。
(もっと読む)
運転支援装置
【課題】車両の走行状況に適した運転方法を運転者が容易に把握することができる運転支援装置を提供する。
【解決手段】運転者が車両を運転する運転方法によって特徴づけられる運転特性に応じて車両特性を変更する運転支援装置10であって、運転特性を推定する運転特性推定部16と、推定された運転特性が車両の走行状況に適しているか否かを判断する運転特性判断部17と、運転特性が走行状況に適していないと運転特性判断部17が判断した場合に車両特性を変更する車両特性変更指示部18と、運転特性が走行状況に適していないと運転特性判断部17が判断した場合に運転特性が走行状況に適合するように運転者に対して運転方法を教示する運転方法教示部19と、を備えたことを特徴とする。
(もっと読む)
作業車用制御装置
【課題】大廻り旋回についての確実な事前判定により、自動旋回制御に反映して大廻り旋回の影響を小さく抑えることができる作業車用制御装置を提供する。
【解決手段】作業車用制御装置は、旋回走行中の走行車輪の転動量に基づいて旋回行程の所定の基準位置nによる作業機動作制御を行う制御処理部21を備えて構成され、上記制御処理部21は、走行車輪の左右回転速度差が所定の基準値より小なる場合に、上記基準位置nを所定の補正処理した補正基準位置により作業機動作制御を行うように構成したものである。
(もっと読む)
1 - 20 / 25
[ Back to top ]