
Fターム[5F031GA43]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 移送装置、手段 (13,292) | アーム部 (5,670) | 駆動機構 (1,726) | リンク機構 (995)
Fターム[5F031GA43]に分類される特許
21 - 40 / 995
搬送ロボットおよび基板処理装置
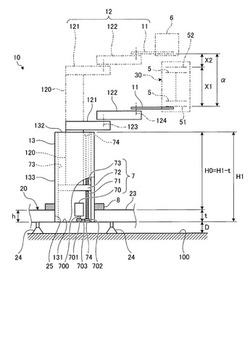
【課題】アーム部の昇降範囲を大きくしつつ、最低限必要な高さ位置までアーム部を降下可能とした搬送ロボットおよび基板処理装置を提供する。
【解決手段】アーム部(12)を水平方向に回転自在に支持し、所定の基台設置フレーム(23)に設置される基台部(13)と、基台部(13)内に立設した縦軸に沿ってアーム部(12)を、基台部(13)の上方に規定されたアーム部昇降範囲(α)内で昇降させる昇降機構(7)とを備える。基台部(13)は、基台設置フレーム(23)に形成された基台収容凹部(25)内に、底壁(131)から所定高さ(h)に設定された基台固定用フランジ(8)までを埋没させた状態で固定されている。
(もっと読む)
基板処理装置

【課題】搬送途上において基板を反転することを容易に可能とする。
【解決手段】基板処理装置は、基板の上方を向く主面を処理する処理部と、基板が載置される載置部近傍の前部移載位置501と処理部近傍の後部移載位置502との間にて基板を搬送する基板搬送部5とを有する。基板搬送部5では、基板を保持する基板保持部51の両側部に一対の円筒部55が設けられ、搬送方向におよそ沿って伸びる一対の外側レール部53が基板保持部51の両側に設けられる。昇降機構571,572は、搬送方向における一対の外側レール部53の両端部に高低差を設けることにより、前部移載位置501から後部移載位置502へと一対の円筒部55を転がして、基板を反転しつつ基板保持部51を搬送する。これにより、搬送途上において基板を反転することが容易に可能となり、基板処理装置におけるスループットを向上することができる。
(もっと読む)
ハンドおよびロボット
【課題】高温環境下における劣化を防止すること。
【解決手段】繊維強化プラスチックによって形成されたフォークを備え、かかるフォークは、外周面にポリイミドをコーティングすることによって形成したコーティング層を有するようにハンドおよびロボットを構成する。なお、コーティング層は、たとえば、ポリイミドを含むフィルム素材であるポリイミドフィルムがらせん状に巻回されることで形成され、外周面の一部のみであってもよい。
(もっと読む)
基板搬送用ハンドおよび基板搬送ロボット
【課題】製造コストの削減および軽量化を図るとともに複数枚の基板を同時に搬送することができること。
【解決手段】基板搬送用ハンドは、第1の載置部と、第2の載置部とを備える。第1の載置部は、所定の高さの載置面にて基板を支える複数の支持部を含み、第2の載置部は、第1の載置部の載置面の高さよりも上方の載置面にて基板を支える複数の支持部を含み、該支持部のうち1または複数は退避可能である。第1の載置部に基板を載置し、さらに、第2の載置部に別の基板を載置するよう基板搬送用ハンドを構成する。
(もっと読む)
基板処理装置及び半導体装置の製造方法
【課題】 基板処理装置が備えるそれぞれの系への電力の供給を個別に制御することで、電力の消費量を低減する。
【解決手段】 処理室内に搬入された基板を処理する処理系と、処理室内に搬入された基板の処理位置を調整する処理室内搬送系と、少なくとも処理系及び処理室内搬送系に電力を供給する主電源と、処理系への電力供給路上に設けられた第1の開閉器と、処理室内搬送系への電力供給路上に設けられた第2の開閉器と、を備える。
(もっと読む)
ロボット、ロボットの設置方法および製造装置
【課題】チャンバ内への設置を容易に行うこと。
【解決手段】実施形態に係るロボットは、胴体部と、アームユニットとを備える。胴体部は、真空チャンバの上方から真空チャンバ内へ搬入されるとともに、真空チャンバへ固定される。また、アームユニットは、真空チャンバの上方から真空チャンバ内へ搬入されるとともに、真空チャンバ内へ固定された胴体部に対して連結される。
(もっと読む)
動画像生成装置、動画像生成方法及び動画像生成システム
【課題】基板処理装置を構成する搬送機構が有する基板支持具の設計動作及び検出動作をシミュレートした動画像を生成することにより、基板支持具の異常動作に関する原因判定材料を提供可能な動画像生成装置、動画像生成方法及び動画像生成システムを提供する。
【解決手段】動作データ生成部21bは、受け付けた基板支持具に関する動作の履歴情報2Dに基づいて、基板支持具の検出動作データ4Dを生成する。抽出部21aは、基板処理装置に係るCADデータ1Dから基板支持具の形状データ5Dと設計動作データ6Dとを抽出する。動画像生成装置は、抽出した基板支持具の形状データ5D及び設計動作データ6D並びに生成した基板支持具の検出動作データ4Dに基づいて、基板支持具の設計動作と検出動作とをシミュレートした動画像を生成する動画像生成部21eを備えている。
(もっと読む)
ロボットのアーム構造およびロボット
【課題】ロボットの最小旋回径を小さくすること。
【解決手段】実施形態に係るロボットは、第1アーム部、第2アーム部、中間リンク部、第1リンク部および第2リンク部を備える。第1リンク部は、第1アーム部と中間リンク部と固定ベース部との間で第1平行リンク機構を形成する。第2リンク部は、第2アーム部と中間リンク部と可動ベース部との間で第2平行リンク機構を形成する。そして、第2リンク部と中間リンク部との連結軸から第1アーム部と第2アーム部との連結軸までの距離は、第2リンク部と中間リンク部との連結軸から第1アーム部と第2アーム部との連結軸までの距離よりも短い。
(もっと読む)
基板処理装置
【課題】基板搬送を効率良く行うことで、基板処理のスループットを向上する技術を提供する。
【解決手段】基板9を処理する基板処理装置100である。基板処理装置100は、外部から基板を受け入れる基板受入部1と、基板9に処理液を塗布する塗布部2と、処理液が塗布された基板9を乾燥させる乾燥部3と、基板9を外部に払い出す基板払出部4とを備えている。また、基板処理装置100は、基板受入部1にある複数の基板9を同時に塗布部2に搬送する搬送機構5と、塗布部2において処理液が塗布された複数の基板9を同時に乾燥部3へ搬送する搬送機構6と、乾燥部3にて乾燥された複数の基板9を同時に基板払出部4へ搬送する搬送機構7とを備えている。
(もっと読む)
搬送機構
【課題】被処理体の自重により被処理体を保持して搬送することが可能な搬送機構を提供する。
【解決手段】被処理体を搬送する搬送機構24、64において、屈伸及び旋回が可能になされたアーム部26、28、66、68と、アーム部の先端に設けられて処理体を保持するピック部30、32、70、72と、ピック部に設けられて被処理体の周縁部と当接して被処理体の自重により揺動して周縁部を保持する複数の保持部材34とを備える。これにより、被処理体の自重により被処理体を保持して搬送可能する。
(もっと読む)
基板処理システム
【課題】作業効率の低下を防止する基板処理システムを提供する。
【解決手段】基板処理を実行する基板処理装置と、前記基板処理装置から、前記基板処理装置に関する情報を一括取得する群管理装置と、前記群管理装置を介して、前記基板処理装置に関する情報を取得する端末装置とからなる基板処理システムであって、前記端末装置の操作者に関する情報と、前記端末装置における前記基板処理装置に関する情報の表示に関する情報とを記憶する記憶手段と、前記記憶手段に記憶された、前記端末装置の操作者に関する情報と、前記端末装置における前記基板処理装置に関する情報の表示に関する情報とに基づいて、前記端末装置における前記基板処理に関する情報の表示を制御する制御手段とを有する。
(もっと読む)
真空処理装置および真空処理方法
【課題】位置ずれの量を抑制してダウンタイムを低減できる真空処理装置または真空処理方法を提供する。
【解決手段】内側が減圧される処理室及びこの処理室内に配置された試料台を有する真空容器と、この真空容器と連結されて前記ウエハを2つのアームの何れかに載せて搬入または搬出するロボットと、このロボットが前記ウエハを搬入または搬出する際にこのウエハの所定の位置のズレの量を検出する手段と、この検出されたズレの量に基づいて前記ロボットの動作を調節する調節器とを備え、前記調節器は、予めティーチングを行った結果に基づいて前記ロボットの動作を調節するものであって、前記ロボットが予めティーチングを行った後にウエハを所定のパターンで搬送した際に検出されたウエハの位置ズレの量の情報に基づいて再度のティーチングを行った後にウエハの処理を行う。
(もっと読む)
基板搬送装置、基板処理システムおよび基板搬送方法、ならびに記憶媒体
【課題】真空において熱をともなう処理を行う基板処理装置において、基板を高速で搬送しても基板の位置精度を高くすることができること。
【解決手段】熱をともなう真空処理が行われる真空処理ユニットに対して基板の搬入および搬出を行う基板搬送装置は、基板を位置決めする位置決めピンを有し、基板を位置決めした状態で保持するピックと、ピックにより真空処理ユニットに対して基板を搬入および搬出するようにピックを駆動させる駆動部と、ピックによる基板の搬送動作を制御する搬送制御部とを有し、搬送制御部は、基板を真空処理ユニットに搬入する際の、常温における基板の基準位置情報を予め把握しておき、実処理において、基板を真空処理ユニットに搬入する際に、その基板の基準位置からの位置ずれを算出し、位置ずれを補正して基板を真空処理ユニットに搬入するように駆動部を制御する。
(もっと読む)
基板処理装置及び半導体装置の製造方法
【課題】表示部に接続された複数の制御部のうち、表示部に表示される表示対象を制御することができる基板処理装置、及び半導体装置の製造方法を提供する。
【解決手段】基板処理装置は、基板処理装置を操作する作業者が操作する操作部342と、操作部342に接続され、前記基板処理装置を制御する少なくとも2つ以上の制御部302,304,312と、制御部302,304,312が出力する信号を表示する少なくとも1つ以上の表示部342と、前記基板処理装置の起動時に、前記少なくとも2つ以上の制御部302,304,312のうち、少なくとも2つ以上の制御部302,304,312の起動時間を異ならせるように制御部302,304,312への電源の投入時機を制御する起動時間制御部344と、を有する。
(もっと読む)
基板処理装置、基板処理方法および記憶媒体
【課題】複数の基板保持部材を備えた受け渡し機構を利用して、効率的に基板を搬送することが可能な基板処理装置等を提供する。
【解決手段】基板処理装置1は処理された基板Wを基板収納部100に戻すにあたり、搬送機構5を用いて処理済みの基板Wを中間受け渡し部41bに搬送する。受け渡し機構2が、中間受け渡し部41a、41bから処理済みの基板Wを取り出して基板収納部100に受け渡す際に、制御部7は、前記基板収納部100からセットで取り出された第1の基板Wと第2の基板Wとのうち、先に処理を終えた前記第1の基板Wが中間受け渡し部41bに受け渡された後、後続の基板Wが中間受け渡し部41bに受け渡されることを待って両方の基板Wを一緒に搬送するか、後続の基板Wを待たずに前記第1の基板Wを搬送するかを判断する。
(もっと読む)
基板搬送装置、半導体製造装置、及び基板搬送方法
【課題】 反りと反発力の大きいウェハであっても、確実に吸着して保持しながら搬送することができる搬送技術を提供することを課題とする。
【解決手段】 基板搬送装置は、基板を吸着保持しながら搬送する搬送ピック40を有する。搬送ピック40の吸着面40aは複数の領域46a,46bに分割され、複数の領域の各々に対して吸着経路が設けられる。制御部60は、吸着経路への負圧の導入を制御して、搬送ピック40による基板の吸着保持動作を制御する。
(もっと読む)
基板処理システム
【課題】基板処理システムを提供する。
【解決手段】ウェハ200を処理する基板処理装置100と、少なくとも一台の前記基板処理装置に接続される群管理システムを含む基板処理システムであって、前記基板処理装置は、前記群管理装置に少なくとも前記基板処理装置の状態を含むデータを送信し、前記群管理装置は、前記基板処理装置から送信される前記データを蓄積する第一の蓄積手段と、前記第一の蓄積手段がデータ蓄積時に待機する第二の蓄積手段と、受信した前記基板処理装置の状態に応じて、前記データの蓄積を前記第一の蓄積手段から第二の蓄積手段へ切替える切替制御手段とを備えた基板処理システム。
(もっと読む)
基板保持機構、半導体基板の分離処理装置および半導体基板の分離方法
【課題】 極めて簡単な構成で液中でも半導体基板を安全かつ確実に保持でる半導体基板の保持機構を提供し、さらに、ウエット状態で密着した半導体基板同士を破損することなく自動的に、高速で分離し、保持して搬送することが可能な半導体基板の保持装置とこれを用いた分離装置および分離方法を提供する
【解決手段】チャック本体110に2以上の液体流入口113とこの液体流入口に接続されている中空円筒状のノズル本体120とを有し、前記ノズル本体にはその前端を閉鎖する蓋121とこの蓋から僅かに離れた位置に径方向に向けて開口形成された吐出口122を有し、吐出口から排出された流体の流路に所定角度に傾斜した斜面を有する液流規制部119を有し、前記液流規制部の外周に基板面と平行な平坦部118を有し、前記平坦部の一部領域に半導体基板に接するように突出した保持部材125が配置されている構成の基板保持機構とした。
(もっと読む)
熱処理装置
【課題】基板保持具に基板を搬送するときにパーティクルの基板への付着を防ぎ、且つ熱処理後に基板保持具がローディング室にアンロードされたときにローディング室の上部側の温度上昇を防ぐことができる技術を提供すること。
【解決手段】ローディング室内にて給気口から排気口に向けて清浄気体による横方向の気流を形成する気体循環機構と、前記給気口に設けられ、前記気流についてローディング室の下部側の通気流量に対する上部側の通気流量の流量比率を調整する気流調整機構と、を備えるように装置を構成する。前記気流調整機構は、熱処理後の基板を保持した基板保持具がアンロード位置に待機し、熱処理後の基板の受け渡しが開始される前の状態における前記流量比率が、前記基板保持具に対して基板の受け渡しを行うときの前記流量比率よりも大きくなるように作動して、ローディング室の上部側の冷却を促進する。
(もっと読む)
搬送車
【課題】被搬送物の位置ずれを効率良く補正することができる搬送車を提供する。
【解決手段】搬送車1は、走行台車3と、ターンテーブル9と、カセットW載置すると共に、所定の伸縮方向に沿って伸縮してカセットWを出し入れする移載装置11と、移載装置11にカセットWが載置されたときに、伸縮方向におけるカセットWの第1位置を検出する第1位置検出センサ13と、移載装置11にカセットWが載置されたときに、伸縮方向に水平面で直交する方向におけるカセットWの第2位置を検出する第3位置検出センサ17と、移載装置11がカセットWを取り込んでからカセットWの移送先に到達するまでに、カセットWの位置ずれの補正量を算出し、補正量を加味した走行台車3の移動量、ターンテーブル9の回転量及び移載装置1の伸張量を設定するコントローラ19とを備える。
(もっと読む)
21 - 40 / 995
[ Back to top ]