
Fターム[5H505LL14]の内容
交流電動機の制御一般 (51,584) | 検出変量、検出手段 (8,979) | 速度の検出 (1,620) | 速度検出器を用いないで速度を検出するもの (581) | 電気的変量の検出によるもの (374) | 電流検出によるもの (262)
Fターム[5H505LL14]に分類される特許
1 - 20 / 262
モータ制御装置
コンベヤ駆動装置
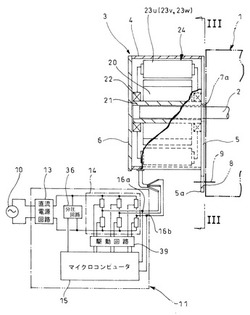
【課題】部品点数を削減して納期の短縮化とコストダウンを図り得ると共に、効率を高めて省エネルギ化とコンパクト化を図ることができ、更に外観向上をも図り得るコンベヤ駆動装置を提供する。
【解決手段】コンベヤ1の駆動軸2をダイレクトドライブ方式で回転駆動する永久磁石同期モータ3を備え、該永久磁石同期モータ3の各相の巻線に発生する誘起電圧に対して進み位相となるよう通電を行うことにより、該永久磁石同期モータ3が所定の回転数範囲内でトルク一定となるよう構成する。
(もっと読む)
回転電機制御装置

【課題】dq軸磁束干渉が生じるような回転電機でも、dq軸磁束干渉により、磁極方向の推定誤差が生じることを抑制できる回転電機制御装置が求められる。
【解決手段】回転電機に高周波電流を印加し、電圧指令に含まれる高周波成分に基づいてロータの磁極方向を推定し、前記回転電機を制御する回転電機制御装置であって、推定dq軸回転座標系における電流指令に高周波電流指令を重畳する高周波重畳部と、電圧指令を高周波座標系に座標変換した値が、高周波目標値に近づくように磁極方向の推定値を変化させる磁極方向調整部と、dq軸磁束干渉に関し、電流指令又はトルク指令に基づいて、磁束干渉推定誤差を算出して、座標変換に用いる高周波電流指令の位相又は高周波目標値を補正する定常推定誤差補正部と、を備える回転電機制御装置。
(もっと読む)
モータ制御装置
【課題】起動時間の短縮化が図れるモータ制御装置を提供する。
【解決手段】マイクロコンピュータ11は、速度比率指令値演算部21と、第1スイッチ22と、速度比率偏差演算部23と、速度制御部24と、電流比率指令値演算部25と、第2スイッチ26と、電流比率偏差演算部27と、q軸電流制御部28と、起動制御部43とを含んでいる。速度比率指令値演算部21は、予め設定されたロータの回転速度の最大値に対する速度指令値ω*の比率を、速度比率指令値として演算する。起動時には、第1スイッチ22は、速度比率指令値を第2スイッチ26に入力させ、第2スイッチ26は、第1スイッチ22から入力する速度比率指令値を、q軸電流比率指令値として電流比率偏差演算部27に入力させる。
(もっと読む)
モータ制御装置、圧縮機およびヒートポンプ装置
【課題】実際の負荷トルクの変動態様に一層一致するようにトルク変動を補償する。
【解決手段】電流演算手段は、モータの巻線電流に基づいてd軸電流およびq軸電流を求める。速度制御手段は、回転速度が指令回転速度に一致するように指令d軸電流および指令q軸電流を生成する。電流制御手段は、d軸電流およびq軸電流が指令d軸電流および指令q軸電流に一致するように制御する。トルクデータ演算手段は、モータの回転角度に応じて記憶手段から基準負荷トルクデータを読み出し、その基準負荷トルクデータからゼロ点設定値を減算するとともにゲインを与えた負荷トルクデータを求める。変化傾向判断手段は、速度変動幅演算手段が求める回転速度の変動幅の変化傾向を判断する。ゲイン調整手段は、回転速度の変動幅が減少傾向であると判断されるようにゲインの値を調整する。補正手段は、負荷トルクデータをモータのトルク定数で除算した電流に基づいて指令q軸電流補正値を演算し、その指令q軸電流補正値により指令q軸電流を補正する。
(もっと読む)
永久磁石形同期電動機の制御装置
【課題】過渡状態においても磁極位置検出回路を用いずに磁極位置と速度を正確に演算する。
【解決手段】回転子に同期した直交回転座標軸γδ軸を定義し、高周波電圧を前記γ軸基本波電圧指令値に加算してγ軸電圧指令値を印加する。検出した電動機電流δ軸成分微分値から前記高周波電圧と同じ周波数のフーリエ級数を演算し、位置推定誤差を演算する。
(もっと読む)
永久磁石形同期電動機の制御装置
【課題】過渡状態においても磁極位置検出回路を用いずに磁極位置と速度を正確に演算する。
【解決手段】回転子に同期した直交回転座標軸γδ軸を定義し、高周波電圧を前記γ軸基本波電圧指令値に加算してγ軸電圧指令値を印加する。検出した電動機電流δ軸成分から前記高周波電圧と同じ周波数の余弦波成分のフーリエ級数を演算し、位置推定誤差を演算する。
(もっと読む)
モータ駆動装置
【課題】負の界磁成分電流を最適な量だけ注入することができ、これによりモータをより高い速度で駆動できるモータ駆動装置を提供する。
【解決手段】モータ制御部は、推定ロータ速度ωmが設定値以上の場合に、その推定ロータ速度ωmの上昇に伴い増加し下降に伴い減少する負の界磁成分電流Idを加えて界磁成分電流の目標値Idrefを算出するとともに、その負の界磁成分電流Idの増減率を推定ロータ速度ωmの高さに応じて可変設定する。
(もっと読む)
モータ制御装置
【課題】停止位置によらず、かつ負荷特性が変化した場合にも安定にモータを駆動するモータ制御装置、およびそれを用いた駆動装置を提供する。
【解決手段】回転角度位置に関する情報を用いない同期運転モードと回転角度位置に関する情報を用いて駆動する位置センサレス運転モードとを備え、前記運転モードを駆動中に切り替えるモータ制御装置において、機械角1周期もしくは機械角1周期の整数倍で変動する周期トルク成分を推定する手段を備え、周期トルクの傾きがゼロ近傍または負になる期間に運転モードを切り替えることを特徴とするモータ制御装置。
(もっと読む)
モータ制御装置
【課題】モータ定数の設定誤差も含めて補償して、高精度なトルク制御が可能なモータ制御装置を提供することにある。
【解決手段】モータ制御装置100は、モータMOTに対するトルク指令値から求められた電流指令値が、モータMOTに電力変換器INVを介して供給される電流に対する電流検出値に一致するように、モータに供給される電流を制御する制御部を有する。制御部は、モータが出力するトルクを推定し、推定されたモータのトルク推定値が、トルク指令値に一致するようにモータに供給される電流を制御する。トルク推定演算部20は、モータが出力するトルクを推定する。位相誤差指令演算部25は、トルク推定値とトルク指令値との偏差から、位相誤差の指令値を算出する。速度推定演算部50は、位相誤差の指令値に、位相誤差推定値が一致するように、速度推定値を出力する。
(もっと読む)
エレベータ制御装置
【課題】エレベータ制御装置のインバータ内のスイッチング素子の、経過時間に対する温度変化を少なくして空冷し、かつ回生抵抗器も空冷する。
【解決手段】実施形態によれば、スイッチング素子を介してインバータの直流側と接続され、電動機の回生電力を消費する回生抵抗器と、回生抵抗器およびインバータを空冷するためのファンと、乗りかごの荷重値を検出する荷重検出手段と、行先階を検出する行先階検出手段とをもつ。また、この実施形態によれば、検出した行先階と荷重値をもとに、運転開始前に、運転に伴うインバータ内のスイッチング素子と回生抵抗器の温度変化パターンを予測する温度変化予測手段と、予測した温度変化パターンをもとに、経過時間に対するインバータ内のスイッチング素子の温度変化の値が所定の基準値以下となり、かつ回生抵抗器が空冷されるように、ファンの駆動電圧および駆動時間を制御するファン制御手段とをもつ。
(もっと読む)
モータ駆動回路、および、モータ駆動システム
【課題】MCUの限られた数のポートで伝達する情報の種類を増加させる。
【解決手段】モータ駆動回路は、MCU300が出力した信号が入力される第1のポートP1を備え、第1のポートP1を介して入力された入力信号のデューティを測定し、デューティ情報信号を出力するデューティ測定回路100aと、入力信号の周波数を測定し、この測定した周波数に応じた周波数情報信号を出力する周波数測定回路100bと、デューティ情報信号および周波数情報信号の何れか一方に基づいて、MCU300が指令したモータの回転速度を計算し、この計算した回転速度の情報を含む回転速度情報信号を出力する指令速度計算回路100cと、回転速度情報信号と、デューティ情報信号および周波数情報信号の残りの他方により得られた情報とに基づいて、モータを指令された回転数で駆動するためのPWM信号である駆動制御信号を生成するモータ駆動波形制御回路100eを備える。
(もっと読む)
モータ制御装置
【課題】電源電流指令値に基づいてブラシレスモータを電流制御で駆動する場合に、外乱に対するロバスト性を向上させることができるモータ制御装置を提供する。
【解決手段】q軸電流指令値演算手段21,22は、ロータが電気角で360°回転する毎に、電源電流検出値IPと電源電流指令値IP*との偏差に基づいてq軸電流指令値Iq*を演算する。そして、電圧指令値演算手段23,24,26,27は、所定の演算周期Ts毎に、q軸電流指令値演算手段21,22によって決定されたq軸電流指令値Iq*とq軸電流検出値Iqとの偏差および所定のd軸電流指令値Id*とq軸電流検出値Idとの偏差に基づいて、q軸電圧指令値Vq*およびd軸電圧指令値Vd*とを演算する。この電圧指令値Vq*,Vd*に基づいてモータ1が駆動される。
(もっと読む)
角速度推定装置
【課題】角周波数が低い領域においても、回転子の位置を推定する技術を提供する。
【解決手段】d軸電圧指令値Vd*からd軸電流Idに基づく電圧降下を減じてd軸誘起電圧edが得られ、q軸電圧指令値Vq*からq軸電流Iqに基づく電圧降下を減じてq軸誘起電圧eqが得られる。d軸誘起電圧edから修正積分器12によって推定d軸磁束φdが得られる。推定d軸磁束φdをq軸誘起電圧eqで除して推定角速度ω0が得られる。推定角速度ω0が積分されて推定位相θが得られる。修正積分器12は、同じカットオフ周波数ωcを有するローパスフィルタ13及びハイパスフィルタ14、及びこれら二つのフィルタの出力を加算して推定d軸磁束φdを出力する加算器16も有している。修正積分器12は更に、推定d軸磁束φdの上限を制限してハイパスフィルタ14に入力するリミッタ15をも備えている。ローパスフィルタ13にはd軸誘起電圧edが入力する。
(もっと読む)
電力変換装置、および、それを用いた空調機,洗濯機
【課題】PHM制御時には、電力変換回路を制御するパルス波形が非周期となるため、直流母線電流より2相分の相電流情報が得られない区間が発生し、電流再現が困難となる。また、PHM制御時に一定間隔で直流母線電流検出を行った場合、特定の相電流情報を連続して得られない区間が発生し、電流再現が困難となる。
【解決手段】電動機に流れる交流電流を検出する電力変換装置であって、非周期パルスを出力する第一のパルス制御回路と、前記非周期パルスを用いて、直流電力を交流電力に変換する、または、交流電力を直流電力に変換する電力変換回路と、該電流変換回路の直流母線電流を検出する直流母線電流検出回路と、該直流母線電流検出回路で検出された直流母線電流を、前記非周期パルスを基にサンプリングしてベクトル制御を行い、前記パルス制御回路への指令電圧を作成する制御回路と、を具備する電力変換装置。
(もっと読む)
モータ制御装置、及び、それを利用したモータの起動方法
【課題】レシプロ式圧縮機のような負荷トルクの変動が大きい圧縮機においても、安定して差圧起動を実現するモータ制御装置及びそれを利用したモータの起動方法を提供する。
【解決手段】d軸電流指令値Id*及びq軸電流指令値Iq*、更には、周波数指令値ω*に基づいてd軸電圧指令値Vd*及びq軸電圧指令値Vq*を出力することにより電力変換回路を制御し、ベクトル制御を用いたモータ制御装置における起動方法において、d軸検出電流Idc及びq軸検出電流Iqcと、d軸電圧指令値とq軸電圧指令値とから軸誤差Δθcを検出し、位置決め運転モードにより前記d軸電流指令値及びq軸電流指令値を出力し、同期運転モードにより、軸誤差検出手段により検出した軸誤差Δθcに基づいて、負荷トルク変動に適合したd軸電流指令値及びq軸電流指令値を出力し、位置フィードバック運転モードによりd軸電流指令値及びq軸電流指令値を出力する。
(もっと読む)
モータ制御装置及び車両用操舵装置
【課題】その目的は、モータ回転角速度を判定条件に加えることなく、精度良く通電不良を検出することのできるモータ制御装置及び車両用操舵装置を提供する。
【解決手段】通電不良検出部71は、相電流値が所定電流値以下であり、且つ電源電圧Vpsが所定電圧値以上である場合に、連続してDUTY指令値が所定電流値に対応する所定範囲の上限値以上であるという第1の判定条件、及び連続してDUTY指令値が下限値以下であるという第2の判定条件を満たすか否かを判定する。そして、通電不良検出部71は、第1の判定条件を満たす状態が継続する時間である第1の継続時間と、第2の判定条件を満たす状態が継続する時間である第2の継続時間とをそれぞれ計測し、第1又は第2の継続時間が、高速回転時におけるモータ21の回転周期に基づく判定時間を超えた場合に、通電不良が発生したと判定するようにした。
(もっと読む)
電力変換装置、電動機駆動システム
【課題】回転子の回転状態を検出するためのセンサを用いずに電動機を制御する電動機の制御方法において、電動機が高トルク運転時でも電動機の運転を持続しつつ、回転子の回転状態を精度よく検出すると共に騒音の発生を抑制する。
【解決手段】電力変換装置50aにおいて、電圧出力手段3は、ベクトル演算手段4からの基本電圧指令値Vdc*、Vqc*に対して高周波の交番電圧を重畳し、三相交流電圧指令値Vu*、Vv*、Vw*を電力変換手段11へ出力する。電流成分分離手段5は、三相電流信号Iuc、Ivc、Iwcから交番電圧に応じた高周波電流成分を抽出し、その高周波電流成分の大きさを表す高周波電流ノルムIhを求める。重畳電圧振幅調整手段9は、電流成分分離手段5からの高周波電流ノルムIhに基づいて、交番電圧の振幅を調整するための重畳電圧振幅指令値Vh*を電圧出力手段3へ出力する。
(もっと読む)
同期機制御装置
【課題】トルクと磁束とを独立して操作できるような電流制御系の構成するとともに、高速駆動時のような同期機の電気角周波数(回転速度)に対する電力変換手段のキャリア周波数の比が小さく、電流フィードバック制御が困難となる条件下においても、電機子鎖交磁束に基づいたトルク指令生成とトルク指令への追従性の向上を図る。
【解決手段】 同期機1の運転条件に応じて、磁束指令生成器5から出力される磁束指令と磁束演算器6から出力される推定電機子鎖交磁束とを切り換えて電機子鎖交磁束を出力するとともに、第2の電圧指令生成器32の出力の有効無効を切り換える信号を出力する磁束設定器8と、磁束指令と推定電機子鎖交磁束との差分に基づいて磁化電流指令を生成する磁化電流指令生成器9とを備えている。
(もっと読む)
モータの制御装置
【課題】指令回転数と実回転数との差を低減できるモータの制御装置を得る。
【解決手段】モータの制御装置は、指令回転数で動作するようにモータを制御するモータの制御装置であって、前記モータを駆動する駆動部と、前記駆動部により前記モータを駆動する際にモータ巻線に流す相電流を検出する検出部と、前記検出部により検出された相電流に応じた値の振動成分を抽出し、前記振動成分を積分した後、前記積分された値から低周波成分をオフセットとして除去することにより、前記指令回転数に応じた電気位相を補正する補正値を演算する演算部と、前記演算部により演算された補正値を用いて補正された電気位相を用いて、前記駆動部の制御信号を生成する制御部とを備え、前記駆動部は、前記制御部により生成された制御信号に従って、前記モータを駆動する。
(もっと読む)
1 - 20 / 262
[ Back to top ]