
Fターム[5H680FF04]の内容
超音波モータ、圧電モータ、静電モータ (19,856) | 製造、制御、電源、保護 (2,336) | 固着加工 (205) | ボルト、ネジ、リベット (47)
Fターム[5H680FF04]に分類される特許
21 - 40 / 47
送り装置

【課題】超音波モータを設置したテーブルからの真空雰囲気中での熱の移動量を増加させ、送り装置の小型化を図る手段を提供する。
【解決手段】基台2に真空雰囲気中で移動可能に支持されたテーブル8に設けられた超音波モータ12を備えた送り装置1において、テーブル8の移動方向に沿って形成された複数の放熱板22を有する放熱体21をテーブル8に設置すると共に、放熱板22の間にそれぞれ配置された複数の受熱板26を有する受熱体25を基台2に設置する。
(もっと読む)
駆動装置および撮像装置

【課題】軸受け部と駆動軸との間に発生する摩擦による摩耗が、スライダに及ぼす影響を低減させることが可能な技術を提供する。
【解決手段】振れ補正ユニット100は、ベース板に設置され、駆動軸AK3を有するヨー方向アクチュエータ23と、駆動軸AK3と摩擦結合される軸受け部63を有する移動部61と、移動部61とは別体として構成され、前記第1の移動体には固定されないが、前記第1の移動体と連動した移動が可能な第1スライダ40と、ベース板と保持部材とによって第1スライダ40を所定平面内で移動可能に支持する支持手段とを備えている。
(もっと読む)
摩擦駆動アクチュエータおよびそれを用いるハードディスク装置
【課題】HDDの磁気記録ヘッドの駆動などのために用いられる超音波モータにおいて、応答性を向上する。
【解決手段】面内振動を行う振動体2をロータ3に内包することで、前記振動体2の振動が摩擦接触するロータ3に伝達されて該ロータ3が回転する超音波モータ1において、前記ロータ3を、剛性を有し、有底円筒状に形成される上下一対の第1および第2の部材31,32の組合わせで構成し、巻ばね4によって発生した弾発力でそれらの底板31a,32a間に前記振動体2を挟圧保持させるとともに、前記底板31a,32aに、すり鉢状のテーパ面31c,32cを形成する。したがって、ロータ3の軸受けを不要にして応答性を向上することができるとともに、振動体(ステータ)2とロータ3との間の摩擦力をより安定させ、駆動性能を安定させることができる。
(もっと読む)
駆動装置
【課題】 電気機械変換素子の伸縮をより大きくすることができると共に、電気機械変換素子の支持安定性をより向上させることができる駆動装置を提供する。
【解決手段】 駆動装置1では、圧電素子4がホルダ3によって弾性的に支持されている。そのため、例えば、圧電素子4と駆動軸6とが当接するように圧電素子4の他端及び駆動軸6の一端がホルダ3によって付勢されるような場合に比べ、圧電素子4の伸縮をより大きくすることができる。しかも、ネジ25によって圧電素子4が基準線FLの延在方向における一方の側に付勢されている。そのため、例えばネジ25が設けられずに圧電素子4の他端に錘部材が取り付けられるような場合に比べ、ホルダ3による圧電素子4の支持安定性をより向上させることができる。
(もっと読む)
超音波モータ
【課題】振動子が被駆動体を安定して微小駆動させることができる超音波モータを提供すること。
【解決手段】圧電素子を有する超音波振動子2と、前記超音波振動子2との間の摩擦力により駆動される被駆動部材4と、前記超音波振動子2における定在波の節近傍に固着され且つ突出部3aを備える保持部材3と、前記保持部材3を押圧する押圧部材9と、前記保持部材3と対向する面である保持部材対向面7bを備える筐体7と、前記押圧部材9又は前記筐体7に設けられ、前記保持部材3における前記突出部3aを押圧して前記保持部材3を前記保持部材対向面7bに圧接させる当接部材13と、を具備し、前記保持部材3は、前記突出部3aに当接する前記当接部材13と、前記筐体7における前記保持部材対向面7bとで挟持されて、前記駆動方向における位置が規制される超音波モータ。
(もっと読む)
駆動装置
【課題】 所定の基準線に対する駆動軸の倒れを防止することができる駆動装置を提供する。
【解決手段】 駆動装置1では、ホルダ3が有する軸受溝11a,12aに設けられた規制部材20によって、基準線FLに対する駆動軸6の傾きが規制される。より詳細には、各軸受溝11a,12aの2つの内面、及びその内面に駆動軸6を押圧する押圧部22によって、駆動軸6が3箇所で支持されることで、駆動軸6が位置決めされる。従って、基準線FLに対して駆動軸6が倒れた状態で圧電素子4がホルダ3によって支持されるのを確実に防止することが可能となる。
(もっと読む)
超音波モータ
【課題】振動子を押圧する為の押圧部材を容易に組み付けることができる超音波モータを提供することができる。
【解決手段】圧電積層体2aに縦振動と屈曲振動とを同時に発生させることで楕円振動を発生させ、該楕円振動により駆動力を得て被駆動部材5を駆動する超音波モータ1において、圧電積層体2aを有する超音波振動子2と、前記超音波振動子2における定在波の節近傍に固着され、前記超音波振動子2を押圧する押圧部材3と、前記超音波振動子2との間の摩擦力により駆動される被駆動部材5と、前記押圧部材3が固定される筐体8と、を具備し、前記押圧部材3は穴部3d,3eを有し、且つ前記筐体8は前記押圧部材の有する前記穴部3d,3eと係合する案内ピン8c,8dを有し、前記押圧部材3は、押圧方向に撓んだ状態で前記筐体8に固定される。
(もっと読む)
振動アクチュエータ
【課題】小型であり且つ単純な構成を有しながらロータをステータに加圧することができる振動アクチュエータを提供することを課題とする。
【解決手段】ステータ2の表面に突出形成された2対の挟持部6によりロータ7の両端部がそれぞれ挟持され、支持ボルト8及びナット9の締結により、ロータ7のそれぞれの端部7aと挟持部6とが互いに加圧されると共にロータ7が支持ボルト8の回りに回転自在に支持される。振動手段3によりステータ2の挟持部6にXZ面内の楕円振動を発生させることにより、ロータ7の端部7aと挟持部6との摩擦力を介してロータ7がY軸回りに回転される。支持ボルト8をナット9に締結するだけでロータ7の端部7aとステータ2の挟持部6とを互いに加圧することができるため、小型で単純な構成を有しながらロータ7をステータ2に加圧することができる。
(もっと読む)
駆動装置及び駆動装置ユニット
【課題】軸方向の振動を阻害せずに振動軸の軸回転を防止できる軸受け部を備え、小型で高い位置精度を有する駆動装置及び駆動装置ユニットを提供する。
【解決手段】振動軸と軸受け部は、互いに当接して該振動軸の軸回転を規制するための規制面をそれぞれ有し、振動軸の規制面を、軸受け部の規制面に当接して押圧する。このときの押圧力を、振動軸が振動中に軸受け部からうける最大抵抗力が、移動部材と振動軸との間の最大摩擦力の2.5倍以下となるようにする。
(もっと読む)
超音波振動子の押圧機構および超音波モータ
【課題】被駆動部材と超音波振動子との接触圧力を均等にバランスさせて、正逆方向の駆動特性を均一にするとともに、被駆動部材を高い駆動効率で駆動する。
【解決手段】超音波振動子2の振動の定在波の腹B1,B2となる2以上の位置に設けられた摺動部材2bを被駆動部材4に押し付ける押圧機構5であって、超音波振動子2の振動の定在波の節A1,A3となる2以上の位置において、超音波振動子2に接触する押圧部材6と、該押圧部材6に対し、2以上の定在波の節A1,A3の間隔方向に離れた2カ所以上の位置において、摺動部材2bを被駆動部材4に押し付ける押圧力Fa,Fbを調節可能に付与する押圧力調節部7とを備える超音波振動子2の押圧機構5を提供する。
(もっと読む)
超音波モータ
【課題】 超音波モータのステータとロータの圧接面での癒着を解消し、モータ始動時の立ち上がり特性を改善する。
【解決手段】 互いに圧接面で圧接するステータとロータとを備える超音波モータであって、ステータに設けられて円周方向に沿って分極した圧電体13に駆動用の高周波電圧を印加する駆動回路4の構成として、超音波モータの始動時に少なくとも周波数をランダムに変化させた高周波電圧を所定時間だけ生成する手段を備える。始動時にタイマー433によりセレクタ431でランダム発振器422の出力を選択し、出力器434からランダム高周波電圧RAMA,RAMBを圧電体13に印加する。圧電体13に不規則な振動が生起され、ステータとロータの圧接面間に当該不規則な振動が作用することになり、両圧接面の癒着を効果的に解消し、モータの回転立ち上がり特性が改善される。
(もっと読む)
圧電アクチュエータを利用したステージ及びこのステージを用いた電子機器
【課題】 位置決め精度の向上を図り、機構が簡単かつ小型であるとともに、磁化を避ける環境下でも使用できるようにする。
【解決手段】 一の方向に移動自在な第1の移動体と、前記第1の移動体に伴って一の方向へ移動するとともに、前記一の方向と異なる他の方向へ移動自在な第2の移動体と、を備えたステージにおいて、
前記第1の移動体に当接させて、この移動体を前記一の方向へ移動させる第1の超音波モータと、前記第2の移動体に当接させて、この移動体を前記他の方向へ移動させる第2の超音波モータと、を備えたことを特徴とする。
(もっと読む)
アクチュエータ及びそれを用いた位置決め装置
【課題】位置決めの高精度化と高分解能化が可能な回転、直動の二方向併進駆動アクチュエータおよび位置決め装置を提供する。
【解決手段】アクチュエータは、磁性体よりなるロータ1の外周に中心軸方向に接触し、遠心方向の運動を規制する磁石21を有する第1駆動ユニット2と、ロータ1の回転方向に磁石21と離間して配置され、ロータ1の外周に中心軸方向に接触し、遠心方向の運動を規制する磁石31を有する第2駆動ユニット3で構成されている。第1駆動ユニット2は磁石21を駆動してロータ1を回転方向および中心軸方向に変位させる。第2駆動ユニット3は磁石31を駆動してロータ1を回転方向および中心軸方向に変位させる。
(もっと読む)
球面超音波モータ
【課題】球体であるロータを複数のステータで保持する球面超音波モータにおいて、複数の自由度を確保しながら小型化、軽量化を実現した球面超音波モータを提供することである。
【解決手段】球状回転子と、圧電体により円環上に進行波を励起するリング状振動子とを備え、前記球状回転子の周りに第1のリング状振動子、第2のリング状振動子と、第3のリング状振動子および第4のリング状振動子を配置して加圧接触させてなる球面超音波モータにおいて、一端に前記第1のリング状振動子を設け且つ他端に前記第2のリング状振動子を設けた第1の枠部材と、一端に前記第3のリング状振動子を設け且つ他端に前記第4のリング状振動子を設けた第2の枠部材とを備え、前記第1の枠部材と前記第2の枠部材とを前記ロータを挟んで交差する向きで設けた。
(もっと読む)
圧電アクチュエータの駆動制御方法、圧電アクチュエータの駆動制御装置、および電子機器
【課題】消費電力を格段に低減できる圧電アクチュエータの駆動制御方法、圧電アクチュエータの駆動制御装置、および電子機器を提供すること。
【解決手段】圧電アクチュエータの駆動制御装置は、被駆動体であるロータがその回転に必要な最小トルクで駆動される場合の最小回転数を設定回転数として記憶し(S10)、この設定回転数を実現するように、駆動信号のパルス幅を基準信号が発せられた際の基準パルス幅に対して制限して駆動制御を行う(S20)。このように、ロータを駆動可能な程度にパルス幅が制限される結果、矩形波駆動において駆動信号のパルスデューティを小さくすることが可能であって、パルス幅の制限を行わないでパルスデューティ100%としたときと比べて格段に低消費電力化できる。これにより、電池寿命を長期化できる。
(もっと読む)
超音波リニア・アクチュエータ
【課題】 携帯電話など携行できる情報端末のオンラインユース化に伴い、機器の軽、薄、短、小、高機能、省電力化が進むに連れて、これらの機器のアクチュエータでは、さらにこの傾向が加速され、電磁機器で対応できる性能限界に達し、代替技術が求められている。
【解決手段】 本発明者が開発してきた円筒型3D電歪公転子はほぼ完全にこの技術目標を満たすが、発生するのは公転トルクであり、リニアトルクに変換しなければならない。スクリュウねじを施した移動子を用いて、リニアトルクに変換した。軸長が直径より短い円筒型公転子の両端面に、回転子のトルク伝達円環を圧接し、回転子を浮揚力で支えると、与圧力の作用支点が回転子と共に回り、摩擦損失を避けることができた。これはトルクを発生するアクティブ軸受とでも表現したい機構で、無偏芯回転となり、超精密、低損失アクチュエータの手段を提供でき、これを用いて自動伸縮するアクティブ鏡筒を実現した。
(もっと読む)
球面超音波モータ
【課題】球面超音波モータの複数のステータのそれぞれをロータに対して適切な強さで押し付け、安定したトルクを得ることができるようにすることである。
【解決手段】複数のステータの少なくとも1つに前記ロータに押し付けるねじれ剛性を有する弾性部材を設け、また、ロータを支持する反力支持部材を設けたことを特徴とする。
(もっと読む)
圧電式のアクチュエータユニット若しくは圧電式の駆動装置
本発明は、圧電式の駆動装置のための圧電式のアクチュエータユニット(3)であって、第1のキャップ(12)に対して緊締された圧電式のアクチュエータ(10)が設けられていて、前記第1のキャップ(12)が、この第1のキャップ(12)を介して圧電式の駆動装置の駆動体(1)に固定するように構成されており、ケーブル(5)及び/又はコンタクトピン(16)が設けられていて、該ケーブル(5)及び/又はコンタクトピン(16)が前記アクチュエータ(10)に結合された、このアクチュエータ(10)を電気的に制御するためのコンタクトエレメントとして構成されている形式のものにおいて、第1のキャップ(12)が、コンタクトエレメント(5,16)を引き込みガイドするための少なくとも1つの開口(15)を有していることを特徴としている。特に有利には、このような圧電式のアクチュエータは圧電式の駆動装置に組み込まれており、この圧電式の駆動装置は、円筒形の駆動面(2)を備えた駆動体(1)と、該駆動体(1)を駆動面(x,y)で振動させる圧電式のアクチュエータ(10)を備えた少なくとも2つの駆動ユニット(3)と、駆動面(2)に当接し、振動によって回転運動せしめられる駆動軸(4)と、アクチュエータ(10)を駆動するために、前記アクチュエータ(10)に回路を接続するためのコンタクトエレメントとを有している。 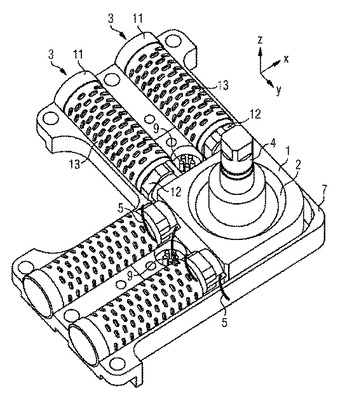 (もっと読む)
(もっと読む)
超音波モータ
【課題】 縦振動モードおよび屈曲振動モードの双方の振動モードをそれぞれ独立した形で、あるいは縦振動モードのみを特別な装置を用いることなく、容易に検出すること。
【解決手段】 駆動用の電気機械変換素子12(A+),12(A−),12(B+),12(B−)および振動検出用の電気機械変換素子12(C+),12(C−),12(D+),12(D−)を備え、前記駆動用の電気機械変換素子12(A+),12(A−),12(B+),12(B−)に所定の位相差および所定の駆動周波数の2相の交番電圧を供給することにより、異なる2つの振動モードを同時に発生させて出力端に略楕円振動を生じさせる超音波振動子を備える超音波モータであって、前記振動検出用の電気機械変換素子12(C+),12(C−),12(D+),12(D−)により縦振動モードおよび屈曲振動モードの双方の振動モードをそれぞれ独立した形で検出可能とされている。
(もっと読む)
超音波モータ
【課題】モータの形状を大きくすることなく、棒状超音波モータの構造に直接、位置検出器(エンコーダ)および、スケールを組み込む。
【解決手段】棒状振動子を固定する支持部材に、移動体(ロータ)の移動量を検出するための移動量検出手段を備え、また回転出力部材にスケールを一体的に備えさせる。
(もっと読む)
21 - 40 / 47
[ Back to top ]