
Fターム[5H680FF22]の内容
超音波モータ、圧電モータ、静電モータ (19,856) | 製造、制御、電源、保護 (2,336) | 制御 (1,111) | トルク制御 (26)
Fターム[5H680FF22]に分類される特許
1 - 20 / 26
圧電モーターの駆動装置、圧電モーターの駆動方法、電子部品搬送装置、電子部品検査装置、ロボットハンド、及びロボット
モータ装置、制御プロファイル生成方法、制御プロファイル生成装置、及びロボット装置
【課題】回転子を高精度に制御する。
【解決手段】回転子と、回転子の少なくとも一部に掛けられる伝達部と、伝達部に接続され、伝達部を移動させる駆動部と、回転子と伝達部との間を回転力伝達状態にして前記伝達部を移動させる駆動動作と、回転子と伝達部との間を回転力非伝達状態にして伝達部を所定の位置に戻す復帰動作とを駆動部に行わせる制御部とを備え、駆動動作を行う駆動期間は、少なくとも初期駆動期間及び主駆動期間を含み、制御部は、初期駆動期間における初期駆動動作と主駆動期間における主駆動動作とを前記駆動部に行わせる。
(もっと読む)
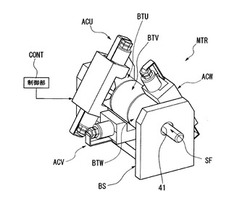
計測装置、モータ装置、及びロボット装置

【課題】出力されるトルクを計測する。
【解決手段】計測装置は、回転子SFの周面の少なくとも一部に掛けられる伝達部BTを用いて駆動動作及び復帰動作を行う駆動部30によって駆動される回転子SFに加えられるトルクを計測する計測部、を備える。
(もっと読む)
モータ装置、駆動制御装置、回転子の駆動方法及びロボット装置
【課題】高いトルクを発生可能なモータ装置、駆動制御装置、回転子の駆動方法及びロボット装置を提供すること。
【解決手段】回転子と、当該回転子の周面の少なくとも一部に掛けられる伝達部と、当該伝達部のうち少なくとも第一部分及び第二部分を移動させる駆動部と、前記第一部分を前記第二部分より後に前記回転子の周面に掛けられた状態にすることによって伝達部と回転子との間を回転力伝達状態とする準備動作、伝達部と回転子との間を回転力伝達状態としたまま伝達部を一定距離移動させる回転動作、及び、回転力伝達状態を解消させて伝達部を所定の位置に戻す復帰動作、を駆動部に行わせる制御部とを備える。
(もっと読む)
多自由度アクチュエータ
【課題】本発明は、小型化が可能な多自由度アクチュエータを提供する。
【解決手段】本発明の多自由度アクチュエータDaは、並進推力の方向と前記並進推力を受けて発生する駆動ベクトルの方向とが互いに一致するように、前記並進推力を発生する3個以上の複数の並進推力素子2と、複数の並進推力素子2に所定の摩擦力で係合する回転体1と、複数の並進推力素子2の駆動を制御する駆動制御部とを備え、前記駆動制御部は、複数の並進推力素子2によって直接的に実現することができない自由度を実現するために、複数の並進推力素子2のうちの1個の並進推力素子2を停止する期間に、残余の複数の並進推力素子2のうちの少なくとも2個の並進推力素子2を駆動するように、複数の並進推力素子2を制御する。
(もっと読む)
振動型駆動装置の制御方法
【課題】複数個の振動波モータの駆動力を合成して被駆動部材に伝達する際に、振動波モータに生じる滑りの発生を抑制し、振動波モータのトルクを効率的に伝達することが可能となる振動型駆動装置の制御方法を提供する。
【解決手段】複数個の振動波モータからの駆動力を合成して被駆動部材に伝達するように構成された振動型駆動装置の制御方法であって、
振動体の摺動面の摩擦力と、前記複数個の振動波モータのトルクの総和を、複数個の振動波モータの個数で割った値と、
個々のモータの中における最小摩擦力を有するモータの該最小摩擦力から得られるトルクとの差の値が、
個々のモータの中における最小摩擦力を有するモータの該最小摩擦力を超えないように制御し、振動体の摺動面における移動体の滑りを抑制する。
(もっと読む)
慣性駆動アクチュエータ
【課題】複数の移動体を備えた構成で、移動体の制御用の配線を減らした慣性駆動アクチュエータを提供する。
【解決手段】第1の移動体105aと、第2の移動体105bと、第1の移動体105aに配置された第1の電磁石104aと、第2の移動体105bに配置された第2の電磁石104bと、第1の移動体105aと第2の移動体105bとに対向して配置された磁性部材106と、第1の電磁石104aを構成する第1のコイル103aと、第2の電磁石104bを構成する第2のコイル103bとに電流を供給する駆動回路101と、駆動回路101を介さず、第1のコイル103aと第2のコイル103bとを電気的に接続させる第1の接続手段とを備え、磁力にて、複数の移動体105a、bの摩擦を制御する。
(もっと読む)
圧電アクチュエーター、ロボットハンド、及びロボット
【課題】安定した状態で確実に起動し安定駆動状態を維持することができる圧電アクチュエーターを実現する。
【解決手段】圧電アクチュエーター100は、圧電素子11を含む振動体1と、振動体1に設けられローター2に当接する摺動部15と、圧電素子11に駆動信号を供給する駆動回路26と、駆動信号と振動体1の振動に基づいて検出される検出信号との位相差を検出する位相差検出回路27と、駆動信号の周波数及び電力を制御する周波数制御器20とを備え、周波数制御器20は、周波数を変化させて、位相差が所定の範囲内となった場合に電圧を上限電圧値に設定し、位相差が所定の範囲外にある場合には電圧を上限電圧値よりも小さい下限電圧値に設定することを特徴とする。
(もっと読む)
モータの駆動装置およびモータの駆動制御方法
【課題】複数のモータによる駆動力を合成して駆動するモータの停止に際し、バックラッシによる出力軸の角度割り出し精度の低下を抑制することが可能となるモータの駆動装置およびモータの駆動制御方法を提供する。
【解決手段】複数のモータによる駆動力を合成して被駆動部材を駆動するモータの駆動装置であって、
前記複数のモータによる合成された駆動力を被駆動部材に伝達する動力伝達手段と、
前記モータの駆動を制御する制御手段と、
を備え、前記制御手段は、前記複数のモータに対して、互いに異なるタイミングで前記複数のモータの回転速度またはトルクのうちの少なくとも一つを変更させ、互いに異なるタイミングでモータの駆動を停止させる。
(もっと読む)
ミラー駆動装置及び方法
【課題】複雑な可動フレーム構造を必要とせず簡便に作製でき、耐久性に優れたミラー駆動装置及びミラー駆動方法を提供する。
【解決手段】ミラー部12の両側に一対のアクチュエータ部30が連結され、さらにその外側の両側に一対のアクチュエータ部20が連結される。外側アクチュエータ部20の一端は固定部22として支持部材に固定され、他端は内側アクチュエータ部30に連結される。各アクチュエータ部20,30は、圧電体の変形によって屈曲変位を行うものであり、それぞれ対応する駆動電圧供給部28,38から駆動電圧が印加される。一方の駆動電圧供給部(例えば28)から、対応するアクチュエータ部(例えば20)に対して共振を励起する周波数の駆動電圧が供給され、これと同時に他方の駆動電圧供給部(例えば38)から、他のアクチュエータ部(例えば30)に非共振でミラー部12を傾ける駆動電圧を供給する。
(もっと読む)
圧電モーターの制御方法及び圧電モーター
【課題】回転体の慣性力が大きいときにも、所望の停止位置を正確に確保できる圧電モーターの駆動制御方法、及び圧電モーターを提供する。
【解決手段】圧電素子1aにより発生した振動を用いて回転体2の表面を摺動して回転させる圧電モーター1の制御方法にかかわる。回転体2を回転させる回転工程と、回転体2を摺動する周波数を下げて停止させる停止工程と、を有し、停止工程では、周波数を下げて最大トルクとなる周波数で圧電素子1aの駆動を停止する。
(もっと読む)
モータ装置及び回転子の駆動方法並びにロボット装置
【課題】高トルクを発生させることができるモータ装置を提供する。
【解決手段】回転子と、回転子の外周の少なくとも一部に掛けられた伝達部と、伝達部に接続され、印加された駆動電圧に応じて伝達部を移動させる複数の駆動部と、回転子と伝達部との間を回転力伝達状態とする保持力に対応する第1駆動波形を備える第1駆動電圧と、伝達部を移動させる駆動力に対応する第2駆動波形を備える第2駆動電圧とを複数の駆動部にそれぞれ印加させて、回転子と伝達部との間を回転力伝達状態として伝達部を一定距離移動させる駆動動作及び回転力伝達状態を解消した状態で伝達部を所定の位置に戻す復帰動作を駆動部に行わせる制御部と、を備える。
(もっと読む)
コントローラ
【課題】操作対象物に加わる力を正確に操作者に伝達させて操作性の向上を図ることができるようにする。
【解決手段】コントローラ1は、略球状の回転子4と、複数の駆動力発生部3A〜3Cと、回転子4に取り付けられ、回転子4を転動させる操作アーム5と、位置検出部6と、マスタ側力センサ7と、制御部8とを備えている。複数の駆動力発生部3A〜3Cは、回転子4を転動可能に支持すると共に、超音波振動を発生させて回転子4を転動させる。位置検出部6は、操作アーム5の位置情報を検出する。マスタ側力センサ7は、操作アーム5に取り付けられ操作アーム5から回転子4に加えられる力を検出している。そして、制御部8は、操作対象物100に作用する外力とマスタ側力センサ7によって検出した操作アームの力情報fmに基づいて複数の駆動力発生部3A〜3Cを制御する。
(もっと読む)
振動波モータ用の負荷トルク変動装置及び画像形成装置
【課題】 ロータに設けられる回転部材に機構的な特徴を加えてロータ及びステータに同じ接触状態が続くことを回避することで偏磨耗を抑制し、振動波モータの長寿命化を実現する。
【解決手段】 振動波モータMで回転するシャフト405に設けられ、シャフト405に掛かる負荷トルクの大きさをシャフト405の回転位相で変動させる偏心カム1302、アーム1303、付勢バネ1402と、シャフト405に掛かる負荷トルクの周期をシャフト405の回転周期に対して変動させるワンウェイクラッチ1301と、を備える振動波モータ用の負荷トルク変動装置500を構成した。
(もっと読む)
高電圧出力ドライバーおよび圧電ポンプ
【課題】電源立ち上がり時におけるショックの発生を効果的に防止する。
【解決手段】昇圧回路において、低電圧電源の出力を昇圧して高電圧の駆動電源電圧を発生する。また、出力回路では、駆動電源を電源として、圧電素子を駆動する一対の相補的な駆動信号を出力する。出力を停止する前記駆動電源の立ち下がり時において、一対の駆動信号の電位差が0の時点から両駆動信号を一緒にグランドレベルまで変化させる。
(もっと読む)
圧電素子の駆動電圧周波数調整機構およびそれを用いた圧電マイクロブロア
【課題】 圧電素子の共振周波数が変動した時にも、安定して駆動させることができる圧電素子の駆動電圧周波数調整機構、およびそれを用いることにより、流体を効率よく、しかも安定して輸送できる圧電マイクロブロアを提供する。
【解決手段】 圧電素子に所定の周波数の駆動電圧を印加することのできる駆動電圧印加手段と、前記圧電素子の駆動時に前記圧電素子に流れる駆動電流をモニタする駆動電流モニタ手段と、前記駆動電流モニタ手段によってモニタしている駆動電流が最大となるように、前記駆動電圧印加手段から前記圧電素子に印加される駆動電圧の周波数制御を行なう制御手段とを備える。
(もっと読む)
アクチュエーター
【課題】走査軌跡が安定して得られ、低エネルギーで駆動可能で、振動駆動手段により励振された振動に基づき振動子の回転振動を得るアクチュエーターを提供する。
【解決手段】振動駆動手段106,107と、振動子100と、振動駆動手段100及び振動子106の間に配置された第1の対をなす梁101,102と、振動駆動手段100及び振動子107の間に配置された第2の対をなす梁103,104とを有する。梁101,102;103,104のそれぞれは、一端が振動駆動手段106,107に接続されこれらからのx方向振動の伝達を受け且つ他端が振動子100に接続されている。振動駆動手段106,107により発せられる振動を梁101,102;103,104の一端に伝達して、梁をそれらの長手方向に並進振動させることにより、梁をz方向に逆位相で座屈振動させ、これにより振動子100をx方向軸Cの周りで回転振動させる。
(もっと読む)
超音波モータおよび超音波モータ付電子機器
【課題】 圧電素子に発生した駆動力が外部にもれる要素を減らし、駆動力を効率よく移動体に伝達する超音波モータを提供する。
【解決手段】 入力される駆動信号によって励振して駆動力を発生する圧電素子10と、圧電素子10を基板7上に支持する支持部材11,11と、を備えた超音波モータ1である。支持部材11は、圧電素子10に前記駆動信号を供給する信号供給機能を備える。従って、信号伝達手段を別個に設ける必要はないため、圧電素子10に生じた振動のもれは従来と比べて少なくなる。このため、超音波モータ1は効率よく移動体12aに駆動力を伝達する。また、支持部材11にくびれを設けて弾性を持たせることにより、支持部材11は圧電素子10を移動体12aに圧接する圧接機構も兼ねる。この場合は、圧電素子10に生じた振動のもれはさらに少なくなる。
(もっと読む)
駆動装置、駆動装置の状態検出方法および駆動装置の制御方法
【課題】圧電素子の状態を検出できる駆動装置、駆動装置の状態検出方法、および、駆動装置の制御方法を提供する。
【解決手段】
電圧が印加されると伸縮する圧電素子5と、圧電素子5に一端が固定された振動部材6と、振動部材6に摩擦係合しする摩擦係合部材7と、電源2に接続され、圧電素子5に電源2の電圧を所定の駆動周期Tで印加する駆動回路4とを有する駆動装置1に、電源2と圧電素子5との間の電路、または、圧電素子2と接地点との間の電路に検出抵抗12を配設し、駆動周期T中の充電スイッチング素子8,10および放電スイッチング素子9,11の動作から僅かに遅れたタイミングで検出抵抗の両端の電位差dV1を測定し検出した電位差dV1が増大したときは、圧電素子5の容量が増加していると判定する。
(もっと読む)
超音波アクチュエータ及びその駆動方法
【課題】
出力トルク一定の条件で、精度良く減速動作が可能な超音波アクチュエータ及びその駆動方法を提供すること。
【解決手段】
本発明にかかる超音波アクチュエータは、例えば、A F機構に用いられ、トレインパルスよりなる駆動信号に応じて回転駆動力を発生するステ一タ1と、前記回転駆動力を実動運動に変換する移動子2とを備えたものである。本発明は、かかる構成を有する超音波アクチュエータにおいて、減速動作の場合に、連続するパルストレインの一部を間引いて駆動信号を構成するものであり、間引かれずに残るパルスの連続する数を最低限2つ、あるいは4つ以上とした。
(もっと読む)
1 - 20 / 26
[ Back to top ]