
国際特許分類[A63H11/00]の内容
生活必需品 (1,310,238) | スポーツ;ゲーム;娯楽 (86,983) | 玩具,例.こま,人形,フープ,積木 (4,067) | 自動式形象玩具 (332)
国際特許分類[A63H11/00]の下位に属する分類
偏心のおもりを回転することによってつくられる振動で動くもの (12)
上下動するのぼり形象 (1)
飛び上がり玩具 (2)
とんぼ返りをする玩具
床上を動くとき,形象が実物そっくりに走る動作をするように,一軸または多軸の下部構造を備えた形象玩具 (4)
ジヤイロスタットの効果によってバランスを保ち機械的に動かされる歩行形象玩具
実際的な歩行運動をする形象玩具 (125)
国際特許分類[A63H11/00]に分類される特許
71 - 80 / 188
脚式移動ロボット
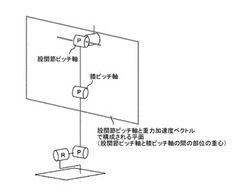
【課題】姿勢安定制御や基本姿勢の維持などの観点から機体の各部位毎の質量分布を最適化する。
【解決手段】脚部における質量分布として、股関節ピッチ軸12と膝ピッチ軸14の間の部位の重心は、基本立ち姿勢と抱き上げ(直立状態)姿勢間で、股関節ピッチ軸と重力加速度ベクトルで構成される平面上に設定されている。これによって、直立状態において基本立ち上げ姿勢と抱き上げ状態を経る間における安定な姿勢遷移を実現することができる。
(もっと読む)
ロボット装置及びその制御方法

【課題】利用者に対してよりパーソナルなロボット装置を提供する。
【解決手段】過去における各利用者による操作履歴や対話履歴、及びロボット感情値を状態管理テーブル123に保持する。本ロボット装置の人物特定手段108は新たに遭遇した人物が過去の利用者であることが判明すると、感情・性格性格手段106は現在のロボット感情値122と状態管理テーブル123に保存された該当人物の過去のロボット感情値を参照して、新たなロボット感情値を生成する。
(もっと読む)
ロボット玩具
【課題】サーボモータのリード線が弛むことなく、しかも外部に露出することのないロボット玩具を提供すること。
【解決手段】サーボモータが内蔵されたサーボモータユニットを備え、サーボモータによる駆動によって、隣り合う2つのブロックの間で構成される関節部に屈伸動作をさせる関節ロボット玩具であって、一方のブロックには、軸線が同一直線上に位置する出力軸及び固定軸がケースから突出して形成されたサーボモータユニットが設けられ、他方のブロックには、サーボモータユニットの出力軸に固定されてサーボモータユニットの軸線を中心に回動可能に連結される連結部が設けられ、サーボモータユニットの内部機器に接続されたリード線は、サーボモータユニットの固定軸の軸心から導出されると共に導出部分が一方のブロック又は他方のブロックに固定的に支持され、導出部分は、屈伸動作に追従して、軸心導入部分を中心に回動可能に構成されている。
(もっと読む)
脚式ロボットの脚関節駆動装置及びその制御方法
【課題】 簡単な構造で、受動歩行、受動動的歩行能動的歩行の3種類の歩行を、駆動モータの制御のみで実現することができる脚式ロボットの脚関節駆動装置及びその制御方法を提供すること。
【解決手段】 少なくとも2本の線・条の一端を回転運動出力軸端の軸心部に固定するとともに、他端を前記回転運動出力軸方向に沿う運動を行う運動体の、回転運動出力軸心から半径方向にAだけ離隔する部位に固定し、前記回転運動出力軸の回転によって2本の線・条に捩りを生ぜしめて回転運動を回転運動出力軸方向に沿う運動を行う運動体の変位に変換するようにした運動変換装置を、脚式ロボットの腰関節、膝関節、および足首関節の少なくとも1つに装着した脚式ロボットの脚関節駆動装置。
(もっと読む)
リンク機構及び脚車輪型ロボット
【課題】リンクの可動範囲を十分に確保しつつ、各リンクの連結部の剛性を高めるのに好適なリンク機構、該リンク機構から成る脚部を有する脚車輪型ロボットを提供する。
【解決手段】脚車輪型ロボット100は、第1リンク17を、2つのリンク部材を間隙を空けて相対させ、その上端部において回転関節16で両持ちで支持し、下端部に略ボックス形状の第1のハウジング17cを一体形成する構成とし、屈曲時に、その間隙内に回転関節16の一部を進入可能な構成とし、第1のハウジング17cの上端部に傾斜面を設ける構成とした。更に、第2リンク19を、2つのリンク部材を間隙を空けて相対させ、その上端部を第1リンク17で両持ちで支持し、下端部に略ボックス形状の第2のハウジング19cを一体形成する構成とし、屈曲時に、第1リンク17の第1フレームの下端部を進入させる構成とし、第2のハウジング19cの上端部に傾斜面を設ける構成とした。
(もっと読む)
リンク機構及び脚車輪型ロボット
【課題】リンクの可動範囲を十分に確保しつつ、各リンクの連結部の剛性を高めるのに好適なリンク機構、該リンク機構から成る脚部を有する脚車輪型ロボットを提供する。
【解決手段】脚車輪型ロボット100は、第1リンク17を、2つのリンク部材を間隙を空けて相対させ、その上端部において回転関節16で両持ちで支持し、下端部に略ボックス形状の第1のハウジング17cを一体形成する構成とし、屈曲時に、その間隙内に回転関節16の一部を進入可能な構成とし、第1のハウジング17cの上端部に傾斜面を設ける構成とした。更に、第1リンク17を回転関節16に対して回動限界位置まで屈曲させた状態で、更に回転関節14の回転軸周りに回動させたときに、第1股関節駆動部120の側面における第1リンク17が当接する位置に、該第1リンク17の当接部位がその回動方向に進入可能な切り欠き120bを設ける構成とした。
(もっと読む)
動き特徴提示装置、動き特徴提示方法及び動き特徴提示プログラム
【課題】本発明は、所望の動きデータを容易に検索させる。
【解決手段】本発明は、特徴提示情報生成部72により、動きデータに基づく音楽ロボット装置12の動きの特徴を表示によって提示するための特徴提示情報を生成し、制御部70により、記憶部73に特徴提示情報を記憶し、外部からの動きの特徴の提示要求に応じて記憶部73から特徴提示情報を読み出すことにより、特徴提示情報に基づき、動きデータに基づく音楽ロボット装置12の動きの特徴を表示して提示することで、当該動きデータに基づいて音楽ロボット装置12を実際に動かさなくとも、動きデータに基づく音楽ロボット装置12の動きの特徴を容易に確認させ、所望の動きデータを容易に検索させることができる。
(もっと読む)
コミュニケーションロボットとその動作方法
【課題】サービスを依頼し易いコミュニケーションロボットを提供する。
【解決手段】眼カメラ20が設けられた頭部52と、広視野カメラ53が設けられた胴部54と、頭部を回転させる頭部制御手段61と、コミュニケーションの成立を合図する合図動作制御手段63とを有するコミュニケーションロボットであって、眼カメラ20及び広視野カメラ53の画像を処理する画像処理手段62を有する。頭部52を所定速度で回転する見回り動作を行いながら、広視野カメラ53の画像から予め検出した人の位置で回転速度を落とし、眼カメラ20の画像からロボットに顔を向ける正面顔の人を検出し、検出した場合に合図を送る。サービスを求める人は、ロボットが見回り動作を行っていれば、サービス可能であると知ることができ、ロボットが自分の方を向いたときにロボットを見ていれば、ロボットにサービスを依頼できる。
(もっと読む)
データ提供装置、データ要求装置、データ提供方法、データ要求方法、データ提供プログラム及びデータ要求プログラム
【課題】モーションデータ全体のデータ量を極力低減する。
【解決手段】モーション提供サーバ13からモーションデータMDを取得して記憶し、このモーションデータMDに対応するモーションパーツデータMPDを広告付楽曲及びモーションパーツ提供サーバ14から取得するようにしたことにより、広告付楽曲及びモーションパーツ提供サーバ14から取得したモーションパーツデータMPDと自身に記憶しているモーションデータMDとを合成して広告付モーションデータCMDを生成することができ、データ記憶再生装置12への提供用に、全ての広告付楽曲データCGDに対応する広告付モーションデータCMDを予め生成してシステムのいずれかで記憶しておく場合に比して、このシステムで管理するデータ全体のデータ量を低減することができる。
(もっと読む)
脚式移動ロボット
【課題】胴体に可動脚を連結して構成された、優れた脚式移動ロボットを提供する。
【解決手段】胴体後方の上端に取っ手を配置し、歩行中や脚式作業中や暴走中には、オペレータは機体の後方からロボットを追いかけて、取っ手を把持することによって容易に捕まえることができる。また、取っ手を操作中に万一足部や腕部が暴走しても、取っ手を掴むオペレータの腕に危害を被る心配がない。また、取っ手の把持部分は緊急停止機構を兼ね備えており、オペレータが取っ手を把持することを検出すると、全身の関節アクチュエータを脱力させる。
(もっと読む)
71 - 80 / 188
[ Back to top ]