
国際特許分類[B24B49/12]の内容
処理操作;運輸 (1,245,546) | 研削;研磨 (20,708) | 研削または研磨するための機械,装置,または方法;研削面のドレッシングまたは正常化;研削剤,研磨剤,またはラッピング剤の供給 (15,323) | 研削工具または工作物の送り運動を制御するための計測装置;指示または計測装置の構成,例.研削開始を指示するもの (1,315) | 光学的装置を有するもの (362)
国際特許分類[B24B49/12]に分類される特許
31 - 40 / 362
加工装置
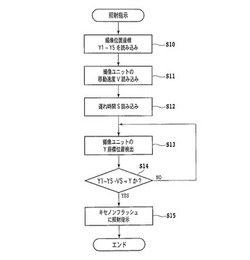
【課題】可動部が比較的早い速度で移動中であってもチャックテーブルに保持された被加工物の撮像すべき領域を確実に撮像できる加工装置を提供する。
【解決手段】被加工物を撮像するカメラと、該カメラの撮像領域にストロボ光を照射するストロボ光源と、該位置検出部から出力される信号に基づき該ストロボ光源を駆動する制御手段とを含み、該制御手段は、被加工物の撮像すべき領域の座標が記憶された座標記憶部と、該ストロボ光源を駆動する照射指示部とを含み、該照射指示部は、該位置検出部から出力される位置信号と該座標記憶部に記憶された座標とが一致したときからストロボ光が照射されるまでの遅れ時間を(S)とし、該可動部の移動速度を(V)としたとき、該座標記憶部に記憶された座標から(VS)を減じた値と該位置検出部から出力される信号とが一致した際、該ストロボ光源を駆動する駆動信号を出力することを特徴とする。
(もっと読む)
バリ取り装置

【課題】 コンベアに対するブラシ部材の相対高さの調整を自動で行え、調整のばらつきを抑え、かつ調整作業が容易なバリ取り装置を提供する。
【解決手段】 バリが上面に形成されたワークWを水平に搬送するコンベア1と、コンベア1の上方に配置されたバリ取りヘッド2と、コンベア1に対するバリ取りヘッド2の相対高さを調整する相対高さ調整機構3とを備える。バリ取りヘッド2は、ブラシ軸心O1回りに回転自在なロール状のブラシ部材20と、ブラシ部材20を旋回軸心O2回りに旋回自在に支持する旋回支持部材26とを有する。相対高さ調整機構3は、昇降駆動源50によりコンベア1またはバリ取りヘッド2を昇降させる。ブラシ部材20の下端を検出可能な投受光式のブラシ下端検出手段50と、ブラシ部材20の下端の検出に基づき昇降駆動源50を制御する昇降制御手段61とを設ける。
(もっと読む)
加工装置
【課題】被加工物に応じて光の当て具合を適宜調整可能な加工装置を提供する。
【解決手段】撮像手段は、チャックテーブル20に保持された被加工物Wを撮像するカメラ94と、ハーフミラー72と、被加工物Wを照明する第1ストロボ光源70と、環状に配設された複数の光ファイバ112と、該複数の光ファイバ112の他方の端面に光を入射して該チャックテーブル20に保持された被加工物Wをリング照明する第2ストロボ光源98と、該第1ストロボ光源70と該ハーフミラー72との間に配設された第1光量調整器82と、該第2ストロボ光源98と該複数の光ファイバ112の他方の端面との間に配設された第2光量調整器100と、を含み、該第1光量調整器82及び該第2光量調整器100は、回転軸を有する回転板88,106と、開口部とを備え、該開口部は該回転軸の回転角度に応じて透過する光量が連続的に変化するように末広がりに形成されている。
(もっと読む)
光学素子製造装置及び光学素子製造方法
【課題】手間や時間をかけることなく光学素子材料の厚さを随時測定することができる光学素子製造装置及び光学素子製造方法を提供する。
【解決手段】光学素子製造装置は、光学素子材料10を保持する光学素子保持具11と、光学素子材料10の加工面10aに当接し、該光学素子材料10を研削又は研磨する加工工具20を支持する加工工具支持装置21と、光学素子材料10と加工工具20との間の相対的な運動を与えるモータ及び運動制御部と、光学素子保持具11に保持された光学素子材料10に対して加工工具支持装置21に支持された加工工具20とは反対側に設けられ、光学素子材料10の厚さを非接触で測定する測定部30とを備える。
(もっと読む)
ブラシ研磨装置及びブラシ研磨方法
【課題】研磨ブラシの磨耗状態を正確に把握してドレッシング実施時期を設定することができ、研磨ブラシの磨耗による加工精度の低下を防止して、金属リングに対する高精度な研磨を施すことが可能となるブラシ研磨装置及びブラシ研磨方法を提供する。
【解決手段】リング回転手段により金属リングWを回転させ、研磨機構3により研磨ブラシ2を金属リングWの回転軌道を横切るように移動させる。研磨ブラシ2を構成している素線2aの先端部の磨耗形状を撮像手段20で撮像し、撮像された素線2aの先端部の磨耗形状に基づいて、判定手段23が研磨ブラシ2のドレッシング実施時期を判定する。
(もっと読む)
自動ドリル先端加工機
【課題】ドリルと砥石との相対位置検出時にドリルと砥石との衝突による損傷を防止する。
【解決手段】既定方向に移動自在に設けられかつ被加工材となるドリルWが把持されるチャックを有する主軸1と、既定方向に移動自在に設けられて主軸に把持されたドリルの先端にホーニングを形成するための加工を施す砥石4と、これら主軸と砥石とを既定方向に移動させるための駆動機構と、を具備する。主軸と一体に設けられてチャック内にあるドリル取り付け軸線と平行な位置関係に配置された計測用プローブ3と、主軸の移動範囲内に配置されてチャックに把持されたドリル及び計測用プローブを撮影する撮影カメラ20,21と、撮影カメラからのドリル及び計測用プローブの撮像情報並びに駆動機構からの駆動情報を取得し、それらの情報を基に、砥石によるドリルの先端にホーニングを形成する情報を駆動機構に発する制御手段と、を有する。
(もっと読む)
薄板状物加工装置及び薄板状部材の製造方法
【課題】本発明は、装置全体のコスト高を抑えることができるとともに比較的メンテナンスが容易である薄板状物加工装置を提供することを目的とする。
【解決手段】この発明の薄板状物加工装置は、第一のレールに沿って走行体が走行し被加工物を搬送及び搬出する搬送搬出ユニット、及び第一のレールに沿って配設され被加工物を加工する複数の加工ユニットを備え、複数の加工ユニットが、被加工物を保持する加工テーブルが加工位置から被加工物の受け渡し位置までの間を移動するよう配設された第二のレールを有し、搬送搬出ユニットが、走行体に取り付けられ、第一のレールの配設方向に沿った軸を中心に回転する回転体、及びこの回転体に設けられ、回転体の回転により上記受け渡し位置の加工テーブルに選択的に対面する少なくとも二箇所に配設された被加工物保持部をさらに備えていることを特徴とする。
(もっと読む)
基板の研磨装置及び研磨方法
【課題】本発明は、基板を吸着保持する吸着シートの破れを自動で確認できる基板の研磨装置及び研磨方法を提供する。
【解決手段】本発明の研磨装置12は、3台の光電センサ40〜44を備えた検査装置10を有する。光電センサ40〜44は、貼着ステージ22から研磨ステージ26に向けて搬送中の膜体16の破れを検出する。光電センサ40〜44は、光を投光する投光部46と光を受光する受光部48とを備えている。投光部46及び受光部48は、膜体16の吸着シート32に対向配置され、投光部46から光を吸着シート32に投光し、吸着シート32から反射した前記光を受光部48によって受光する。前記受光量の変化に基づいて膜体16に破れが発生したと検知部50が判定する。
(もっと読む)
ワーク切削ラインの表示方法
【課題】半導体ウェハのようなワークでの切削ラインの位置を直観的に認識し易くし、切削ラインの位置の確認を混乱せずに確実に行えるようにする。
【解決手段】第1カメラ22で撮影したワーク全体を映し出す広範囲画像および第2カメラ24で撮影した前記ワークの一部を拡大して映し出す高倍率画像であって工作機械の制御軸座標との対応関係が既知の画像を画像処理装置28により生成し、工作機械の制御装置に記憶しているワークの切削位置データに基づいて画像処理装置により切削ラインの描画データを生成し、ワークの広範囲画像および高倍率画像に切削ラインを重ね合わせてディスプレイ装置30に表示する。
(もっと読む)
ガラス板の面取り方法及び面取り装置並びにガラス板
【課題】本発明は、直角度が許容値から外れたガラス板を直角度が良好なガラス板に効率よく加工するガラス板の面取り方法及び面取り装置並びにガラス板を提供する。
【解決手段】本発明のガラス板の面取り装置10は、ガラス板12の基準辺S1を砥石28の移動方向Aに対して直交方向となるように、CPU40が姿勢変更装置26を制御してガラス板12の姿勢を変更する。これにより、砥石28、28によって面取りされる辺S2、S3と基準辺S1との直角度が略直角になる。砥石28、28による辺S2、S3の面取り、及び直角度修正加工が終了すると、ガラス板12の姿勢を平面視において90度変更し、残りの辺S1、S4を面取り加工する。
(もっと読む)
31 - 40 / 362
[ Back to top ]